
考虑驾驶员特性的车道偏离动态预警模型
2020-12-31 09:32屈贤谢军李震
湖北汽车工业学院学报 2020年4期
屈贤,谢军,李震
(重庆工程职业技术学院 智能制造与交通学院,重庆402260)
车道偏离预警系统(lane departure warning system,LDWS)通过机器视觉或道路模型等识别行驶车辆的位置,一旦检测出车辆有偏离车道线的倾向,系统立马预警[1]。研究表明[2],LDWS至少可以降低1/4 的车道偏离事故。车道偏离预警算法是影响车道偏离预警准确性的关键因素。因此,研究车道偏离预警算法对提高预警系统准确性具有重要的指导意义。目前国内外很多学者针对车道偏离预警算法进行了研究,并且取得了丰硕的研究成果,主要包括道路模型和图像信息方法[3]及基于机器视觉的图像信息处理方法。道路模型方法主要有基于路边振动带的决策模型、基于车辆偏离时间(time to lane crossing,TLC)的决策模型[4]、基于车辆当前位置的决策模型、基于未来偏离距离的决策模型[5]、基于车辆横向位置的决策模型等。基于TLC的决策模型是最常用的算法之一,车辆从当前位置行驶至车道边界线时的时间小于设定值时,系统会发出报警。该方法一般假设车辆行驶状态在预测的时间内保持不变,较少考虑驾驶员特性,且预警阈值多选择固定阈值。针对现有TLC 预警算法的不足,在考虑驾驶员特性的基础上,基于模糊推理规则提出动态TLC预警模型,提高车道偏离预警的准确性和自适应性。
1 车道偏离动态预警系统设计
车道偏离受驾驶员、车辆、道路等综合因素的影响。为使车道偏离预警系统及时响应,降低漏警率和误警率,提出考虑驾驶员特性的车道偏离预警模型,如图1 所示。根据车辆行驶状态、驾驶员类型等参数,基于模糊控制算法获取动态的车道偏离预警开启阈值t,与基于时间的偏离决策算法得到的TLC对比分析,若TLC小于t,则系统开启预警参考意见。同时,预警系统通过采集转向信号灯和方向盘信号灯信息,对驾驶员的驾驶意图进行判别。若驾驶员为无意识偏离,预警系统立即开启,发出警报,否则系统关闭。
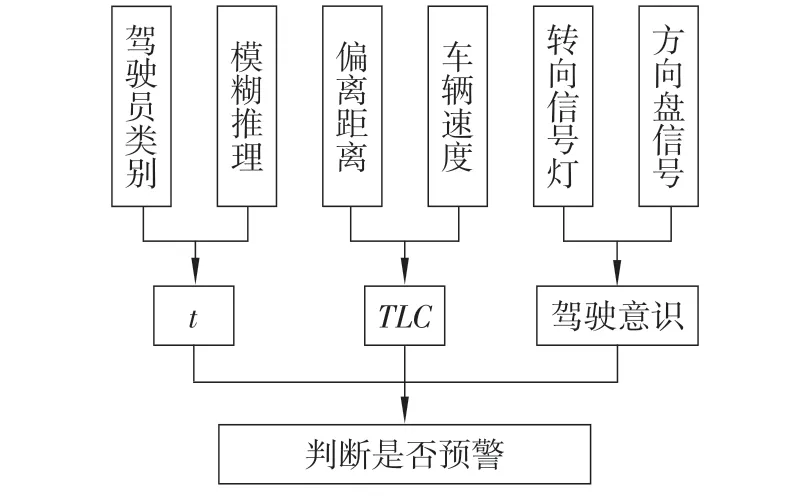
图1 考虑驾驶员特性的车道偏离预警模型
2 驾驶员意图识别模型
车辆预警系统是否开启取决于驾驶员的驾驶行为,若驾驶员为有意识换道,则系统预警关闭,否则系统进行预警。转向灯开关信号是驾驶员是否有意识换道的重要判断依据,若某一侧转向灯开启,则认为驾驶员行为是有意识换道,系统预警不开启。单一的评判标准使人机协调问题较突出。因此在转向灯开关信号基础上,增加方向盘转矩作为驾驶员意图的判别依据。当方向盘转矩T小于1 N·m 时,认为驾驶员处于无意识操控车辆,反之则表示驾驶员为有意识操纵车辆[6]。驾驶员意图识别模型如图2所示。
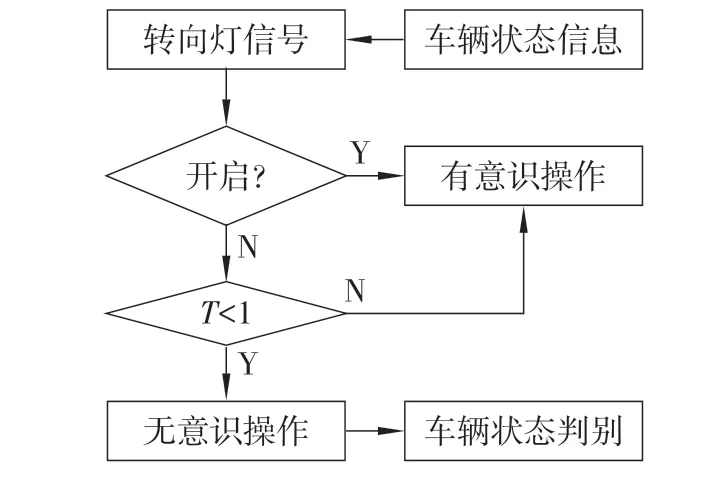
图2 驾驶员意图识别模型
3 车道偏离动态预警模型
3.1 基于时间的车道偏离决策
假设车辆行驶在直线道路,其前轮转角为0°,且在一段时间内车辆运行状态保持不变,近似为直线[7]。由于我国的交通规则为靠右行驶,故一般情况下我国车辆在行驶过程中向右偏离道路的情况较为常见。因此主要以车辆向右偏离为例来研究不同情况下车辆偏离时间的计算模型,如图3 所示,点O为车辆质心,点A为车辆右前轮位置,点B为预设的车辆跨越车道线的位置,D为车道线之间的宽度,L为车辆质心到车道中心线的距离,θ为车辆相对航向角,vy为车辆行驶速度。
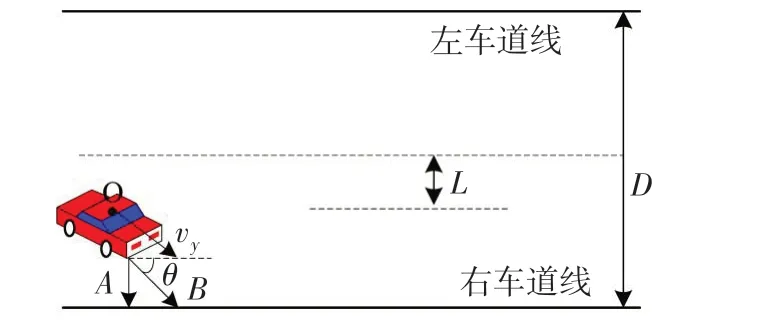
图3 车道偏离模型
假设车辆在偏离过程中航向角θ始终保持不变,车辆右前轮距道路右边界的垂直距离为y,根据三角形几何关系可得车辆偏离到右车道线行驶的距离lAB为

若TLC小于设定的t时,车辆即将发生车道偏离。系统根据车辆行驶状态识别驾驶员的驾驶意图,若驾驶行为为无意识偏离,系统会发出预警。由式(3)可得,基于TLC的偏离预警算法为

3.2 考虑驾驶员特性的TLC阈值确定
TLC阈值是影响系统报警准确率的重要因素。车辆行驶安全性受人、车、路、环境等因素的综合影响,由于不同类型驾驶员的驾驶习惯不同,即使同一驾驶员在不同车道上,t也会不同[8]。采用传统的固定阈值,会导致系统的虚警率和误警率提升。综合考虑驾驶员驾驶特性和预警系统的时变性、非线性,基于模糊控制原理提出了考虑驾驶员驾驶特性的动态TLC阈值确定方法。
驾驶员类型分为激进型、一般型和谨慎型。激进型驾驶员往往习惯靠近道路中心线行驶,谨慎型驾驶员的驾驶习惯倾向于在车道中心行驶,一般型驾驶员驾驶车辆较平稳。车辆横向偏差距离能较好地反映驾驶员的类型,因此采用车辆横向位置差的大小来衡量驾驶员类型。综合考虑影响车辆横向运动的因素,选择车辆偏离速度vy、横向偏差l作为模糊控制系统的输入,t作为输出构建模糊控制器。其中vy的论域设定为0~1.5 m·s⁻¹;考虑到车道宽度和车辆轮距,l的论域设定为0~0.9 m;t的论域为0.7~2.5 s[9]。考虑驾驶员特性的TLC 阈值模糊控制器框图,如图4所示。
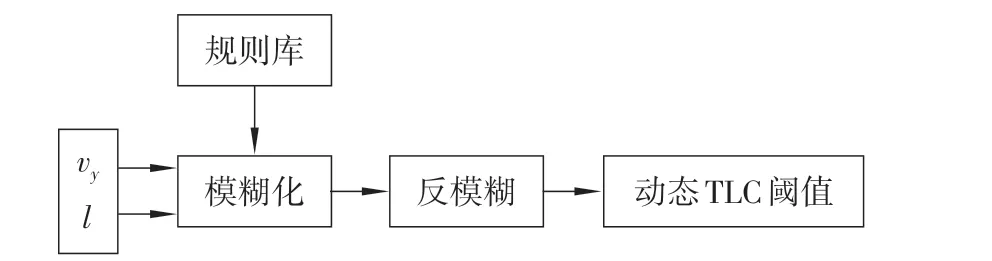
图4 模糊控制器框图
隶属度函数是模糊控制的应用基础,构造合适的隶属度函数是建立模糊控制的关键。系统输入模糊集为{S,M,L},输出模糊集为{S,ZS,M,ML,L},其中S 表示小,ZS 表示中小,M 表示中,ML 表示中大,L表示大。输入输出隶属度函数如图5所示。
确认输入输出论域及隶属度函数后,根据专家知识来制定模糊推理规则,如表1所示。根据模糊规则可以得到输入输出值对应关系,以一般型为例,如图6所示。
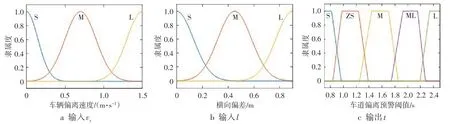
图5 输入输出隶属度函数

表1 模糊推理规则
4 仿真结果分析
采用上海华育HYM-9型汽车驾驶模拟器开展驾驶试验。试验道路为两车道,沥青路面,附着系数为0.85,初始车速为30 km·h⁻¹,天气晴朗。试验车辆质心距前轮距离为1.11 m,轮距为0.68 m,车辆的航向角为5°。选择12名25~45岁,且具有2年以上驾驶经验的驾驶员,1~4为激进型驾驶员,5~8为一般型驾驶员,9~12为谨慎型驾驶员,都熟练模拟驾驶系统和响应的规则。
试验分别在驾驶员有意识驾驶和无意识驾驶2种状态下进行。有意识驾驶时,设定驾驶员在转向或换道时,开启转向灯,方向盘扭矩大于1 N·m。无意识驾驶时,设定驾驶员在转向或换道时,未开启转向灯,方向盘扭矩小于1 N·m。试验时,分别对固定TLC 阈值的预警模型及考虑驾驶员特性的动态TLC阈值的预警模型进行50次测试试验。对数据统计分析,虚警数如表2所示。预警准确率结果如图7所示,平均准确率对比如表3所示。
综合表2~3 和图7 可知,无论是对于有意识驾驶车辆还是无意识驾驶车辆,文中提出的动态TLC预警模型较定值TLC 预警模型,虚警次数较少,预警准确率较高,达到93%以上。针对激进型、一般型、谨慎型驾驶员,动态TLC 车道偏离预警模型均可准确预警。其中,有意识操作车辆时,谨慎型驾驶员的车道偏离预警平均准确率最高,达97%;无意识操作车辆时,一般型驾驶员的车道偏离预警平均准确率最低,达93%。
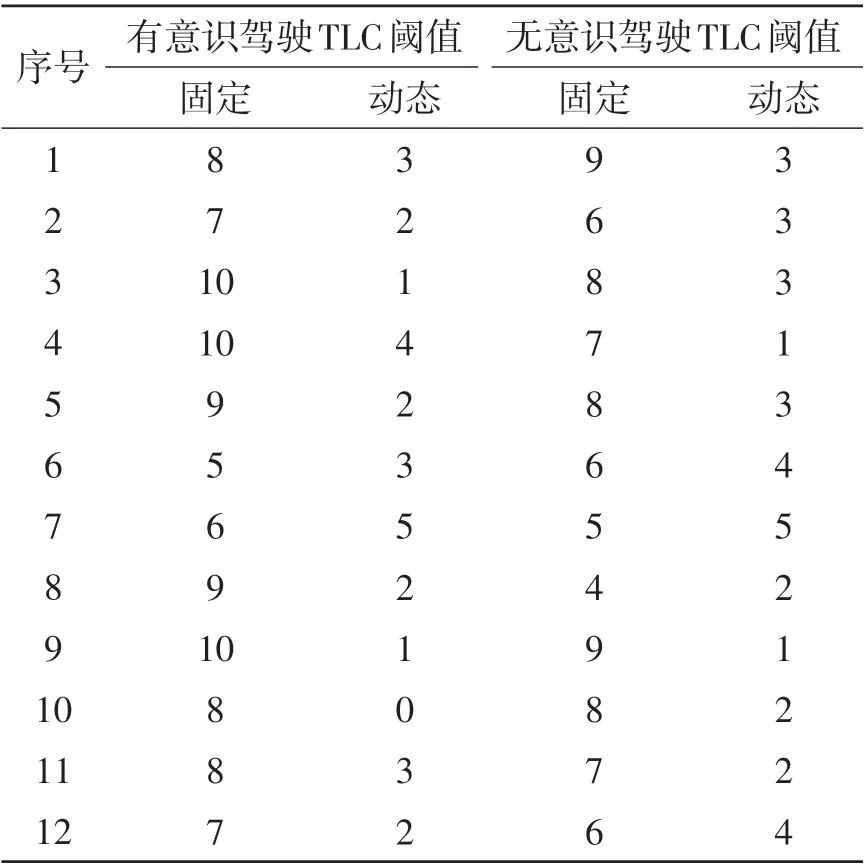
表2 车道偏离虚警次数对比 s
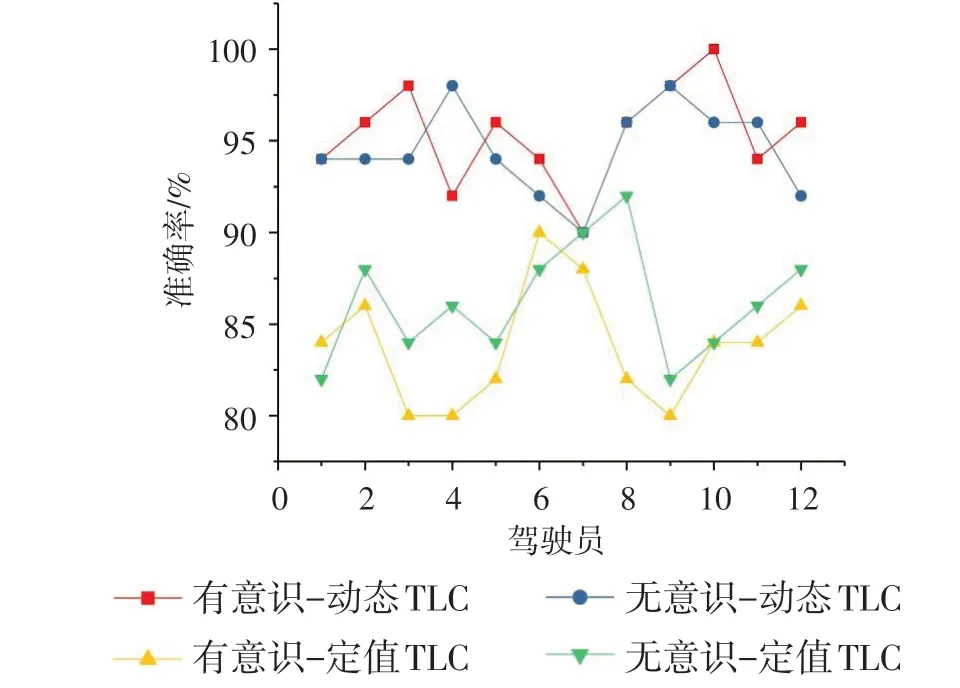
图7 车道偏离预警准确率对比
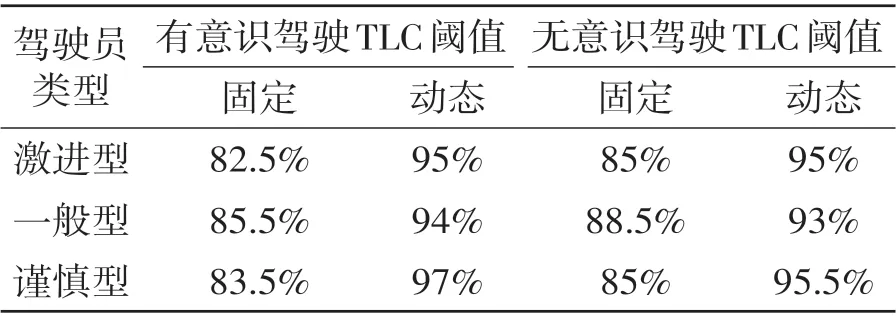
表3 车道偏离预警平均准确率对比
5 结论
文中综合考虑驾驶员的驾驶特点、车辆运行状态及趋势,基于模糊推理动态确定动态TLC 阈值,提出了考虑驾驶员特性的车道偏离动态预警模型。车道偏离动态预警模型可针对激进型、一般型、谨慎型3 种典型的驾驶员类型,动态确定预警阈值,在有意识操作和无意识操作状况下,均可较准确地判断车道偏离,自适应性较好。
猜你喜欢
中国交通信息化(2022年7期)2022-10-27
汽车实用技术(2022年14期)2022-07-30
汽车实用技术(2022年7期)2022-04-20
汽车实用技术(2022年4期)2022-03-07
卫星应用(2021年11期)2022-01-19
科学大众(2021年9期)2021-07-16
民用飞机设计与研究(2020年4期)2021-01-21
中国交通信息化(2020年11期)2021-01-14
电子制作(2019年11期)2019-07-04
活力(2019年22期)2019-03-16
