神经微创医疗机器人关键技术发展综述
2020-12-29 06:41孙椰望罗晓华曹也曹安林刘玉柱林井副张之敬马利平
颈腰痛杂志 2020年6期
孙椰望,罗晓华,曹也,曹安林,刘玉柱,林井副,张之敬,马利平
(1.中国科学院理化技术研究所;2.北京理工大学重庆创新中心,3.北京理工大学;4.北京301医院;5.中国科学院自动化研究所,北京 100000)
随着人们生活水平的不断提高,国内不良饮食习惯和身体素质的亚健康状态日益严峻,特别是常见的周围神经病与日俱增,例如面瘫、坐骨神经痛、神经炎、急性感染性多发性神经根神经炎、臂丛神经损伤、尺神经损伤、桡神经损伤、正中神经损伤、胫神经损伤、腓总神经损伤、股外侧皮神经炎、肋间神经痛等,这些疾病发病人群庞大,极大地危害了广大人民群众的正常生活。对于药物治疗无效和伴随骨、软组织损伤的神经损伤疾病,微创治疗成为唯一途径。其中,常见的微创手术方式包括吸取、切除、缝合等典型方式。然而,周围神经系统的微创手术种类繁杂、难度大、技术攻坚困难。主要问题包括:(1)人因干扰复杂,机体处于变动状态,实时准确定位困难,进入人体的人机协同的柔性微创机器人技术缺乏,不能准确进行实时交互式手术。(2)微细病变微创困难,微细神经的压迫、损伤、粘连等病症,很难利用现有ISO微创标准的直径5 mm器械进行手术,急需研制直径更小的精密微细手术装置,实现真实的神经微创。(3)柔性自调姿微创技术缺乏,肌肉组织微小变动就会导致规划定向路径的手术定位失败,导致手术重复进行,机体重复损伤多发,极大地加重了患者的痛苦和医务人员的工作难度。为此,本文针对周围神经微创技术的迫切需求和精准微创手术的关键问题,分析了国内外微创医疗机器人技术的发展概况。
1 国内神经微创临床技术
如图1所示,周围神经在人体范围广,涉及较多的复杂区位特征以及各种骨架体,图1案例的变路径“穿刺-活检-夹取”的整体微创技术方案迫切需要变化微创路径的精准微创技术,采用目前的刚性直接穿刺技术对人体的破坏性损伤十分严重,甚至瘫痪绝育等。但是,国内变路径毫米级精准微创手术的器械难题十分突出。
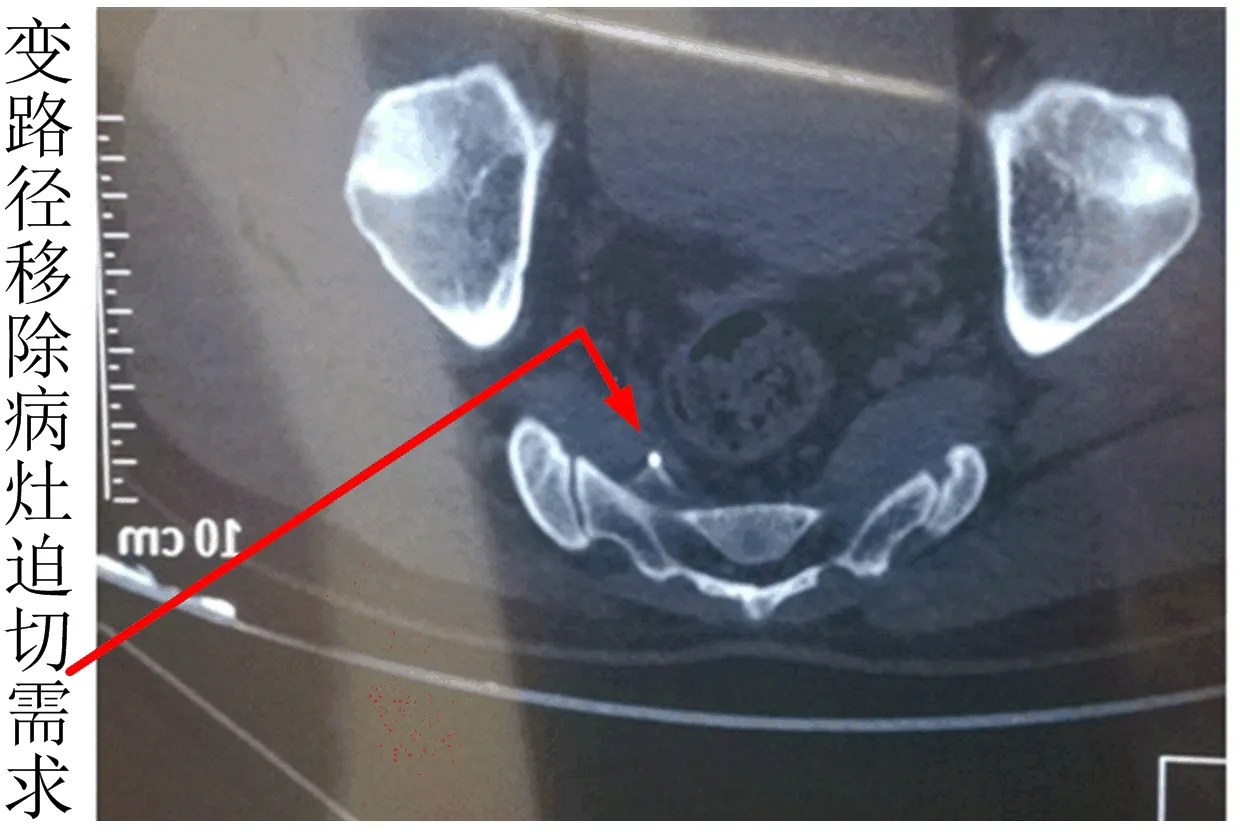
图1 周围神经特征及精准柔性微创的迫切需求
目前,国内神经微创以图2刚体结构手持微创装置治疗为主,很难实现路径变动、人机协同、自动导航和精准微创的手术迫切需求。图2(a)为固定角度微创器械,图2(b)采用CT介入导航的直针进行坐骨神经手术技术,这些设备导致微创过程实时的准确性低、CT辐射大、复杂区位病灶无法治疗、效率低、肌体变动的重复进针和二次损伤的严重问题,急需研制适应性较好的微创机器人系统。
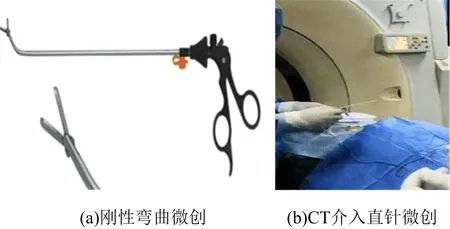
图2 目前临床微创典型器械
2 微创协作机器人技术
微创医用机器人技术领域是集医学、生物力学、机械学、材料学、计算机科学以及机器人学等多学科为一体的新型交叉技术,能够从视觉、触觉和听觉方面为医生决策和操作提供充分的支持,扩展医生的操作技能,提高疾病的诊断与治疗质量[1]。我国手术机器人的相关研究始于20世纪90年代中期,手术机器人的研发分别在神经外科、骨科、心血管外科及泌尿外科等领域取得了重要的突破[1-4]。1997年,北京航空航天大学与北京301医院联合研发了基于PUMA262工业机器人的脑外科机器人辅助定位系统,并成功应用于临床[2,3]。2011年,上海交通大学通过研究光学导航系统与手术机器人系统整合的关键技术,以颅颌面外科手术精确治疗为目标,初步设计了基于光学导航控制的颅颌面外科手术辅助机器人系统[5]。2012年,北京理工大学进行了穿刺力建模、软组织建模及虚拟仿真建模、减小穿刺过程软组织变形的研究,搭建了微创穿刺手术的实验系统,设计研制了用于穿刺治疗的融合多种传感器的穿刺针夹持器,进行了微创穿刺安全防护性能设计与研究,建立了实验系统穿刺针位姿描述方法,但是结合CT的介入试验研究尚缺乏,精准微创导航和变动路径穿刺技术没有研究[6]。在普通外科领域,2014年,天津大学发布了“妙手”机器人系统的改进版,辅助完成多例胆囊摘除和结肠肿瘤根治等手术。此外,北京航空航天大学与北京积水潭医院联合自主研发的TiRobot 骨科手术机器人,可规划手术路径并精确引导内植物的置入。2015年,北京积水潭医院应用TiRobot骨科手术机器人完成了全球首例基于术中实时三维影像的机器人辅助胸腰椎骨折内固定术和首例复杂上颈椎畸形矫正手术[7-10]。
但是,机器人精准微创实时导航的柔性变动路径精准微创技术未见报道。2018年,哈尔滨工业大学机器人研究所对软体机械臂的仿生机理、驱动及建模控制研究进行了深入分析,指出软体机械臂的高柔顺性、复杂环境适应性及人机交互性等特点,能够在医疗手术方面取得较好的应用效果,但是柔性机器人的应用需要突破新材料制备、结构刚柔耦合设计和适应性传感器技术等难题[11]。
3 柔性微创机器人技术
有别于微创协作机器人,柔性微创机器人直接进入体内进行手术,要求灵活、可控和微细尺度融合技术。国际上以荷兰代尔夫特理工大学医工系为代表,其长期引领世界技术发展,特别是Paul Breedveld团队近十几年来取得了众多成果[12-23],如图3所示,结构包括前端柔性弹簧结构体、曲面路径进给联动驱动线控结构、刚体连接导向套的刚柔混合结构、关节导向与线控杠杆混合结构,实现了人机交互复杂微小路径的适应性微创手术需求,特别是在乳腺炎、胆囊炎、囊肿消除等微创方面取得了显著的应用效果。另外,Paul Breedveld团队研制了直径0.4-0.5 mm系列的多种柔性微创手术机器人,并且植入了微细视觉实时导航光纤,产品临床应用于微细眼角膜治疗、复杂盆腔和变路径手术等多类型的手术中,这些装置已经在欧美临床上推广使用。但由于治疗需求的差异和关联技术的缺乏,这些微创机器人都是纯机械结构的人手操控方式,尚未研制临床使用的智能导航柔性微创机器人系统。
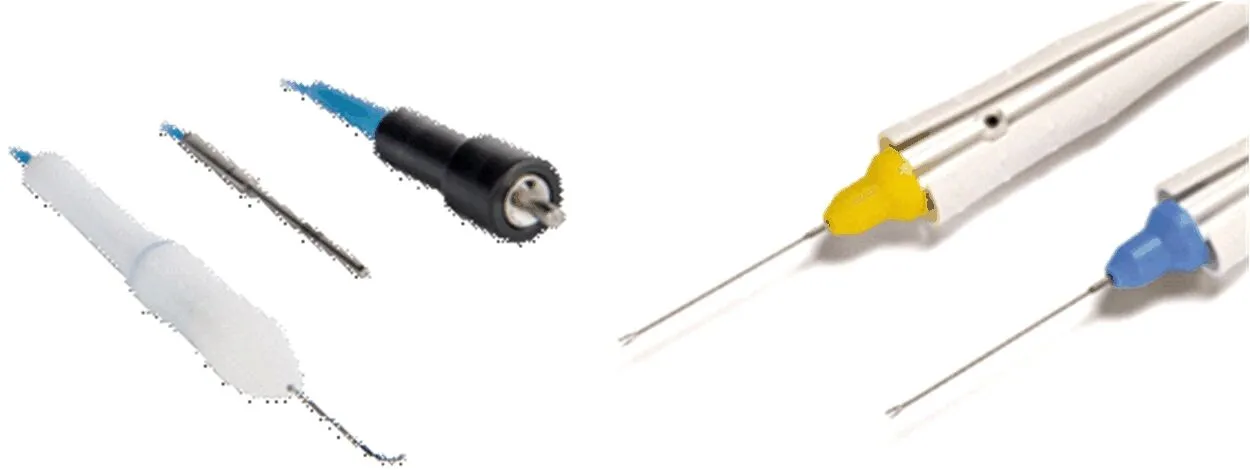
图3 直径0.5毫米的柔性线控微创系统
智能导航微创技术方面,达芬奇一直处于国际领先水平,达芬奇手术机器人于2005年被美国FDA批准用于妇科微创手术,此后,该技术迅速普及[8,9,24]。临床应用结果表明,手术机器人手术具有更高的精确性、更好的操控性,能在骨盆中完成精细的操作,有利于功能的重建和盆腔淋巴结清扫。如图4所示,达芬奇微创系统主要包括外科医生控制台、床旁机械臂系统、成像系统[25,26]。其中,成像系统(Video Cart)内装有外科手术机器人的核心处理器以及图像处理设备,外科手术机器人的内窥镜为高分辨率三维(3D)镜头,对手术视野具有10倍以上的放大倍数,能为主刀医生带来患者体腔内三维立体高清影像,使主刀医生能更准确辨认解剖结构,提升了手术精确度[27-30]。达芬奇微创机器人系统虽然很好地实现了人机协同,但是手术创伤集中在直径5 mm左右,患者短时间康复困难,手术昂贵,并且微创终端的机器人结构主要是刚体关节结构,操作空间要求较大,很难实现微细病变体的治疗[31,32]。
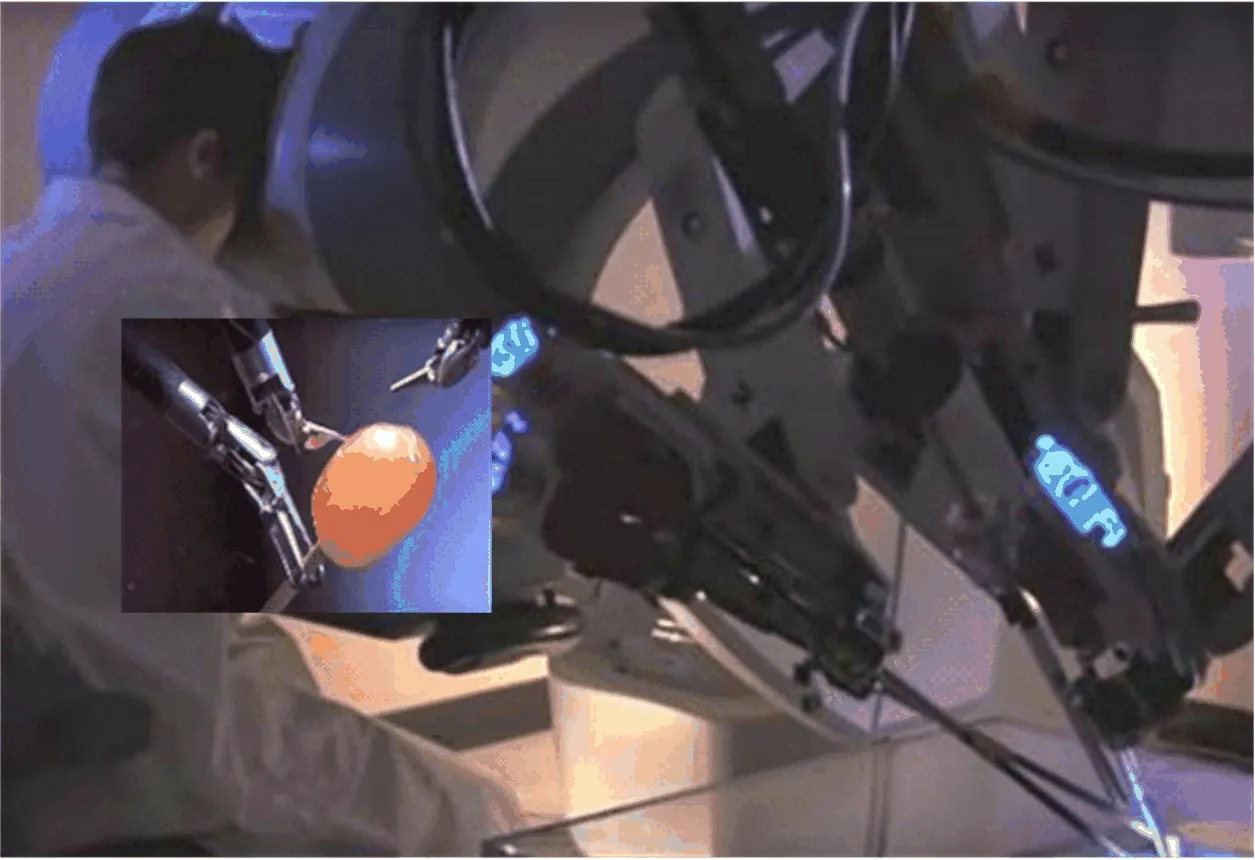
图4 达芬奇微创机器人系统
2015年,北京柏惠维康科技有限公司率先研制了Remebot神经外科毫米级外部导航定位机器人系统,如图5所示,该微创机器人系统获得了国内多家医院的好评,实现了人机协同的毫米级精准微创,但是一直处于直针刚体微创技术方面,缺乏柔性毫米微创和内部实时导航耦合技术,很难进行复杂变轨微创路径的智能精准手术。

图5 Remebot人机协同微创机器人系统
2019年,美国公开了一种自主导航的柔性微型医疗机器人,一个机器人导管借助人工智能和微导航技术,能够帮助医生进行心脏手术,这是首个可在体内自主导航找到目标位置的医疗机器人[33],该机器人装有触觉传感器,顶端装有微型相机,可利用机器学习和图像处理技术,在“陌生”的黑暗环境中识别所接触的组织类型、所处位置,判断行进方向,但是这种智能机器人系统还没有临床应用的报道,并且,脱离医生主导的手术装备是否符合法定的医疗规范尚待讨论。
2020年,北京理工大学联合荷兰代尔夫特理工大学、301医院和中科院技术团队,公开了一种基于外部视觉定位、CT辅助病变体引导和微创机器人内部微细视觉实时耦合导航的智能精密柔性线控机器人系统[32]。如图6所示,该系统重点以优于3 mm直径的神经微创医疗机器人结构为主要特征,实现线控机器人前端的多自由度调姿,并且结合智能控制系统和微细实时内部视觉导航系统,进行精准微创,团队研发了首台套样机系统。
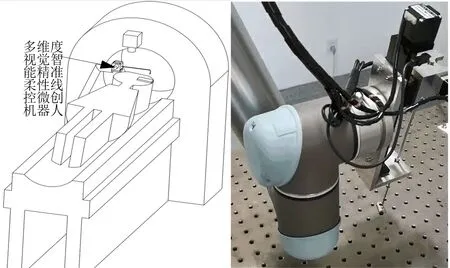
图6 多维度视觉导航的智能柔性微创机器人系统
4 结论
综上所述,周围神经变路径的精准微创机器人系统由于受到人体组织变动对进针的力学干扰的影响,很难实现高精度的定位,并且缺乏智能微细柔性机器人典型结构的系列化设计与控制技术。因此,神经微创医疗机器人技术需要重点开展以下技术突破:(1)研究揭示肌体生物力学和动力学特性对微创机器人进针的影响机理,具体针对周围神经微创区位的变路径精准进针困难的科学问题,采用数值动态计算和样机试验分析结合的方法,深入研究肌肉的差异组织粘滞力、多物理层收缩变动和瞬时局部触动激励机械特性对微创机器人系统和超自由度结构的进针影响。(2)研究揭示肌肉典型机械特性对微创机器人结构形变和精准行进的影响机理,指导肌肉组织微创精准进针的机器人结构优化和进针工艺制定,形成毫米级微创智能进针的工艺技术和系列化结构设计规范,促进毫米级变路径微创智能精准进针技术的系列化产品研制及应用。(3)突破多尺度视觉实时导航的柔性微创准确定位技术,解决毫米级病灶的精准定位和去除,高效救治病人,极大降低CT辐射的手术风险。(4)研制适用于毫米级微创的变路径柔性微细机器人结构和控制系统,实现适应于毫米级多类型多区位病变体的便捷去除和智能化控制,高效地造福社会。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
实用手外科杂志(2022年2期)2022-08-31
保健医苑(2022年1期)2022-08-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
华声文萃(2019年8期)2019-09-10
文萃报·周五版(2019年25期)2019-09-10
中国中医药现代远程教育(2018年1期)2018-01-24
腹腔镜外科杂志(2016年10期)2016-06-01
中国医疗美容(2015年1期)2015-07-12