
无人搜救系统态势感知能力分解及重要度分析
2020-12-28 11:49李惟黄鹤
现代电子技术 2020年24期
李惟 黄鹤


摘 要: 海上无人搜救系统作为我国空军、海军卫勤保障部队的现代装备,是实现我国海疆权益战略保障的重要支撑。目前,国内关于该系统的研究只局限于设计环节中的技术问题。该文立足于人工智能“空天地海”一体化作战体系架构,结合科研团队的空军智能无人机基金课题创新性成果,对海上无人搜救系统遂行军事任务能力、人工智能集群作战态势感知能力进行了需求说明。通过多视图的方式得出态势感知能力所需的具体功能,并通过粗糙集理论对其任务载荷功能进行了重要度分析,取得了良好的中试试验指标数据。
关键词: 无人搜救系统; 态势感知; 能力分解; 重要度分析; 任务载荷; 粗糙集理论
中图分类号: TN830.1?34; E917 文献标识码: A 文章编号: 1004?373X(2020)24?0082?06
Decomposition and importance analysis of situational awareness of
unmanned search and rescue system
LI Wei, HUANG He
(School of Electronics and Control Engineering, Changan University, Xian 710061, China)
Abstract: As the modern equipment of the air force and navy medical support forces, the maritime unmanned search and rescue system is an important support to realize the strategic support of China′s maritime rights and interests. The domestic research on this system is limited to the technical problems in the design process. On the basis of the based on artificial intelligence air?space?ground?sea integrated combat architecture, in combination with the innovative achievements of air force intelligent UAV fund project of scientific research team, the requirements for the military mission carrying out capability of maritime unmanned search and rescue system and the operational situational awareness capability of artificial intelligence cluster are interpreted. The specific functions of situation awareness capability are obtained by means of the multi view method, and the importance analysis of its loading function is performed by the rough set theory, by which the good index data of the pilot scale test is obtained.
Keywords: maritime search and rescue system; situational awareness; capacity decomposition; importance analysis; task loading; rough set theory
0 引 言
据中国海上搜救中心统计,仅2017年,全国各级海上搜救中心共核实遇险事故2 053起。因此,为了保证我国的海洋权益和海上安全,必须建立起完善的海上搜救制度,对海上搜救相关技术进行深入地研究。无人系统作为新兴发展起来的装备,由于平台无人,可以前往气候条件恶劣、空间限制、危险系数大等人员难以前往的地域,完成指定任务。特别是对于海上搜救领域,由于海难发生区域天气状况、海洋环境等信息不确定,无人系统能够更加快速安全地完成搜索、救援等一系列任务。目前关于海上搜救和无人系统,主要研究都集中于搜救系统和无人系统的导航、定位、通信、决策等技术,对于无人搜救系统的态势感知能力鲜有研究。本文主要针对海上无人搜救系统态势感知能力进行分析,对研究目标进行系统功能分解,并对各功能重要度进行分析。
1 国内外研究现状分析
在海上搜救方面,李宁等对如何利用北斗短报文服务确保搜救过程中救助与被救助双方通信的问题进行了研究,解决了传统海上搜救中的“盲搜”问题[1];李阳晖针对影响海上险情的影响因素多、救援环境复杂造成的海上搜救效率不高问题,对如何构建海上搜救智能辅助决策系统进行了研究[2];朱岿等针对海上搜救辅助决策技术,主要研究了搜索区域的确定和搜索策略的优化[3];Melsom等通过对海洋环流模型的建立,对搜救过程中的搜索区域进行了预测[4];Brushett等通过研究风压差数据,实现了在搜救过程中对失事船只海上漂移情况的预测[5];高松等针对海上搜救对各类支援信息的需求,构建了基于SOA架构的国家海上搜救环境服务保障平台[6];Bezgodov等通过对海上漂流目标进行研究,建立相应的网络模型,使海上搜救效率得到了提高[7]。
国内外学者不仅在理论研究方面进行了大量研究,还对关键技术的运用做了实际验证,ICARUS团队在2015年的机器人搜救比赛展示了水面和水下无人系统在搜救任務中情况评估、水下测绘、人员定位等多项技术[8]的实际运用,并取得了第2名的成绩。
从机器人搜救这一赛事也可以看出,未来搜救领域也将大量使用无人系统。无人机感知和规避技术作为无人系统自主化、智能化的重要标志,在无人机实际使用中的障碍规避、路径规划等方面都起到了举足轻重的作用[9]。在搜救任务中,无人系统的感知主要是对目标及环境信息的探测,且由于搜救目标一般与无人系统较难建立其稳定、精确的通信,因此对于搜救目标和环境的探测属于非合作目标的感知。在非合作环境感知过程中,无人系统主要依靠雷达、红外、激光雷达、光电等各类传感器实现对目标的探测以及环境障碍的规避[10?14]。基于此,学者们在无人系统控制[15]、路径规划[16?17]、传感器[18?21]等多个方面都开展了大量研究。
但是,关于无人搜救系统的态势感知方面研究还不够充分,目前大量研究主要还是针对无人系统在作战领域的态势感知,在搜救方面,文献[22]主要研究了深度学习在无人搜救系统态势感知中的运用。在无人搜救系统中的态势感知虽然研究较为深入[23?24],但是多是针对传感器本身,并没有学者指出在无人搜救方面态势感知的内容以及所需的能力。因此,本文着重分析无人搜集系统中态势感知到底应该生成什么样的信息,并依据此对其能力需求进行研究。
2 海上无人搜救系统结构及任务分析
无人搜救系统主要完成对目标的搜索和救援两大任务。其中,搜索主要需要对救援目标进行探测,以及对周围环境进行探测,从而对目标进行准确定位;救援主要需要对目标进行抓取并固定,随后进行运输;完成这些功能的基础是无人救援系统的通信、控制、续航等能力的体现。
2.1 基本思路
本文以某型海上无人搜救系统为例进行分析。该系统主要构成是多域跨介质无人搜救平台和水下潜航器,其无机系统基本物理结构及组成如图1、图2所示。该无人搜救系统具备复合导航、远距跨介质通信、多数据融合有效载荷、长航时、大载重、高精度定位、电磁探测、耐6级海况等能力,可以精准搜索、跟踪、救援地下、水中目标。
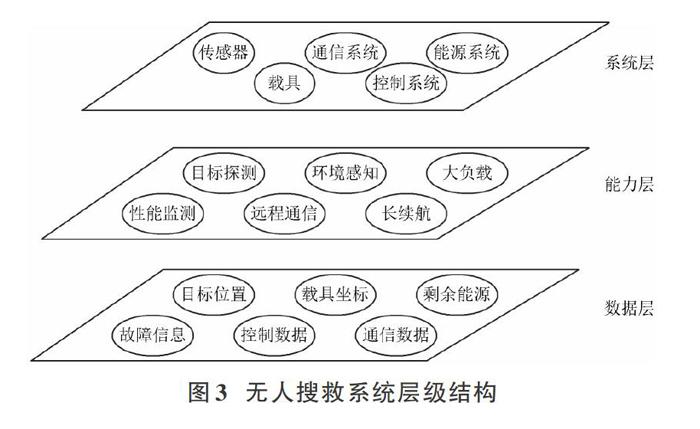
如图3所示,通过系统层、能力层和数据层对于无人搜救系统进行分析。
系统层主要描述了无人搜救系统的结构构成,分别由载具、能源系统、通信系统、控制系统、多传感器等部分组成;
能力层主要描述了无人搜救系统所应具备的能力,包括了大负载、长续航、对目标的探测、周围环境的感知、与救援人员的远程通信、以及对系统自身的性能监测等能力;
数据层主要描述了无人搜救系统在完成既定功能时所获取或传输的信息,包括了搜救目标的位置信息、无人载具的坐标、剩余的能源量(剩余续航时间)、自身系统的故障监测信息、救援人员的控制数据以及相应的通信数据。
2.2 海上无人搜救系统任务能力分解
海上无人搜救系统中,最主要的任务是对救援目标的搜索和救援。其中,搜索需要在未知海况情况下实现对目标的探测,而救援是确保救援目标能够安全地被运送至目的地,其中,整个过程要确保无人搜救系统稳定安全工作。
在对目标的探测过程中,通常采用雷达、红外、光学等多种传感器,经过信息融合技术,实现目标的准确定位。在确定目标搜索区域时,则需要通过目标失事或救援位置,结合环境情况,如风速、洋流等信息,对目标海上漂移情况进行预测。对目标实施救援时,需要依靠强大的负载能力对目标抓取并进行长距离运输。对任务的具体行动实施,均是建立在态势感知和可靠的系统情况下进行的。而完成整个任务本身,也需要系统拥有对目标准确探测定位、可靠长距离通信等诸多能力。
图4为空中/水面跨介质无人搜救平台系统结构框图,其中给出了该平台的关键子系统及其功能联系。
通过利用装备AD理论和DoDAF多视图方法对海上无人搜救系统进行分析,确定需求生成的3个需求域,即任务域、能力域和功能域。其中,任务域描述的是执行海上搜救任务“要干什么,怎么做”,能力域描述的是“需要什么样能力”,功能域描述的是整个系统“需要什么要的功能”。其映射关系如图5所示。
在某一给定的需求层次上,各个域之间的映射关系可写成[A=XB]的形式,其中,X表示A和B之间联系的分析矩阵。
第一级分解中,任务域总的任务可分为2个子任务:目标搜索任务A1和目标救援任务A2;为实现这2个任务,能力域的总能力可分解为2个子能力:态势感知能力B1、系统可靠性能力B2;为满足这2个子能力,需要整个系统具备3个子功能:正确发现目标功能C1、安全运输功能C2、正确决策功能C3。
根据对海上无人搜救系统的分析,上述3个域中的映射关系可表示为:
[A1A2=1101B1B2] (1)
[B1B2=101111C1C2C3] (2)
式中:“1”表示存在映射关系;“0”表示不存在映射关系。
第二级分解中,任务域总的子任务可进一步分解为5个子任务:位置预测任务a1、目标识别任务a2、目标定位任务a3、目标固定任务a4、目标运输任务a5;为实现这5个任务,能力域可进一步分解为5个子能力:目标信息获取能力b1、自身信息获取能力b2、环境信息获取能力b3、通信可靠性能力b4、功能可靠性能力b5;为满足这5个能力,需要整个系统进一步具备9个子功能:失事点定位功能c1、环境感知功能c2、目标准确定位功能c3、目标判别功能c4、长续航功能c5、大载重功能c6、自身状态监测功能c7、信息融合功能c8、可靠通信功能c9。
根据对海上无人搜救系统的分析,上述域中的映射关系可表示为:
[a1a2a3a4a5=1110111101110010000100011b1b2b3b4b5] (3)
[b1b2b3b4b5=111100011000000111010000011000000111111111111c1c2c3c4c5c6c7c8c9] (4)
对于以上映射关系,任一分析矩阵通过行列的交换均可以得到形如[X00XX0XXX]的矩阵,即无人搜救任务、能力和功能之间的关系满足准耦合设计,说明该结构分解是合理的。
则通过对上述空中/水面跨介质无人搜救平台为基础的海上无人搜救系统分析可以得出,对于无人海上无人搜救系统,要能够完成既定任务目标,其态势感知能力应该具备失事点定位、环境感知、目标准确定位、目标判别、自身状态监测、信息融合、可靠通信7项功能,这也是无人搜救系统态势感知所应具备的基本能力。
3 基于粗糙集理论的无人搜救系统态势感知能力分析
无人搜救系統中,态势感知所应具备的能力重要性具有很强的不确定性、模糊性,一般难以定量地对其重要性进行排序,进而对系统结构设计进行优化。粗糙集理论为Z. Pawlak于1982年提出的一种数据分析理论,主要用于处理模糊和不确定性知识。该理论能够较好地适用于无人搜救系统的态势感知能力分析,具体分析流程如图6所示。
对于海上无人搜救系统的态势感知能力所应具备的7项功能,失事点定位、环境感知、目标准确定位、目标判别、自身状态监测、信息融合、可靠通信,分别表示为R1~R7。根据系统是否满足该功能分为不满足和满足2种情况,对于上述7种功能总共有27种组合方式。其中,失事点定位和目标的准确定位通常具有一定的相互关联,一般系统同时满足或不满足该2种功能;目标判别和环境感知一般与信息融合功能相联系,因此对于该3种功能,系统一般同时满足或不满足。因此,真正实际情况中,对于上述7种功能总共有24=16种可能。根据16种组合是否能够满足无人搜救系统的搜救任务要求,可以得到决策表,如表1所示。
若记[R1={r1|r1∈R1}],[R2={r2|r2∈R2}],…,[R7={r7|r7∈R7}],决策属性集[D={d|d∈D}],条件属性集[C={r1,r2,r3,r4,r5,r6,r7}],属性集[A=C?D],则根据决策表可以得到:
[U/{ri}={{X5,X8,X10,X11,X13,X14,X15,X16}, {X1,X2,X3,X4,X6,X7,X9,X12}}] (5)
[U/{rj}={{X3,X6,X9,X10,X12,X13,X15,X16}, {X1,X2,X4,X5,X7,X8,X11,X14}}] (6)
[U/{r5}={{X4,X7,X9,X11,X12,X14,X15,X16}, {X1,X2,X3,X5,X6,X8,X10,X13}}] (7)
[U/{r7}={{X2,X6,X7,X8,X12,X13,X14,X16}, {X1,X3,X4,X5,X9,X10,X11,X15}}] (8)
[U/{ri,rj}={{X10,X13,X15,X16},{X5,X8,X11,X14}, {X3,X6,X9,X12},{X1,X2,X4,X7}}] (9)
[U/{ri,r5}={{X11,X14,X15,X16},{X5,X8,X10,X13}, {X4,X7,X9,X12},{X1,X2,X3,X6}}] (10)
[U/{ri,r7}={{X8,X13,X14,X16},{X5,X10,X11,X15}, {X2,X6,X7,X12},{X1,X3,X4,X9}}] (11)
[U/{rj,r5}={{X9,X12,X15,X16},{X3,X6,X10,X13}, {X4,X7,X11,X14},{X1,X2,X5,X8}}] (12)
[U/{rj,r7}={{X6,X12,X13,X16},{X3,X6,X9,X10,X15}, {X2,X7,X8,X14},{X1,X4,X11}}] (13)
[U/{r5,r7}={{X7,X12,X14,X16},{X4,X9,X11,X15}, {X2,X6,X8,X13},{X1,X3,X5,X10}}] (14)
[U/{ri,rj,r5}={{X15,X16},{X11,X14},{X9,X12},{X4,X7}, {X10,X13},{X5,X8},{X3,X6},{X1,X2}}] (15)
[U/{ri,rj,r7}={{X13,X16},{X8,X14},{X6,X12},{X2,X7}, {X10,X15},{X5,X11},{X3,X9},{X1,X4}}] (16)
[U/{ri,r5,r7}={{X14,X16},{X8,X13},{X7,X12},{X2,X6}, {X11,X15},{X5,X10},{X4,X9},{X1,X3}}] (17)[U/{rj,r5,r7}={{X12,X16},{X6,X13},{X7,X14},{X2,X8}, {X9,X15},{X3,X10},{X4,X11},{X1,X5}}] (18)
[U/C=U/{ri,rj,r5,r7}={{X1},{X2},{X3},{X4},{X5}, {X6},{X7},{X8},{X9},{X10},{X11},{X12}, {X13},{X14},{X15},{X16}}] (19)
[U/D=U/{d}={{X13,X14,X15,X16}, {X1,X2,X3,X4,X5,X6,X7,X8,X9,X10,X11,X12}}] (20)
式中:i=1,3;j=2,4,6。
根据相对约简和依赖度的定义,可以得到D的C正域为:
[POSC(D)={X1,X2,X3,X4,X5,X6,X7,X8,X9,X10, X11,X12,X13,X14,X15,X16}] (21)
则:
[k=card(POSC(D))card(U)=1] (22)
即C完全依赖于D。
同理,可以得出:
[POSC-{ri}(D)={X7,X12,X14,X16}] (23)
[POSC-{rj}(D)={X1,X2,X3,X4,X5,X6,X9,X10}] (24)
[POSC-{r5}(D)={X1,X2,X3,X4,X5,X7,X8,X9, X11,X13,X14,X16}] (25)
[POSC-{r7}(D)={X1,X2,X3,X4,X5,X6,X7,X8, X11,X14,X15,X16}] (26)
則各条件属性的重要性为:
[σCD(ri)=card(POSC(D))-card(POSC-{ri}(D))card(U) =0.75] (27)
[σCD(rj)=card(POSC(D))-card(POSC-{rj}(D))card(U) =0.5] (28)
[σCD(r5)=card(POSC(D))-card(POSC-{r5}(D))card(U) =0.25] (29)
[σCD(r7)=card(POSC(D))-card(POSC-{r7}(D))card(U) =0.25] (30)
則可以得出,态势感知所应具备的7种功能的重要性排序为“失事点定位/准确定位—环境感知/目标判别/信息融合—自身状态监测/可靠通信”。
4 结 语
本文针对鲜有对无人搜救系统态势感知能力研究较为缺乏的问题,以有某型复杂海况下海上无人搜救系统为研究对象,通过对海上无人搜救系统层级结构进行分析、任务能力进行分解,以及通过多视图分析了海上无人搜救系统的结构、任务需求、能力及功能,得出了海上无人搜救系统态势感知所应具备的功能。利用粗糙集理论,对态势感知所应具备的能力进行了定量分析,得出了各能力的重要性排序。研究结果对后续无人搜救系统设计和态势感知能力运用等提供了理论支撑。
参考文献
[1] 李宁,张强.基于北斗系统的海上应急救援系统的研究[J].中国海事,2019(7):49?51.
[2] 李阳晖.海上搜救智能辅助决策系统的构建与应用[J].中国水运,2019(7):47?48.
[3] 朱岿,牟林,王道胜,等. 海上搜救辅助决策技术研究进展[J].应用海洋学学报,2019,38(3):440?449.
[4] MELSOM A, COUNILLON F, LACASCE J H, et al. Forecasting search areas using ensemble ocean circulation modeling [J]. Ocean dynamics, 2012, 62(8): 1245?1257.
[5] BRUSHETT B A, ALLEN A A, KING B A, et al. Application of leeway drift data to predict the drift of Panga skiffs: case study of maritime search and rescue in the tropical Pacific [J]. Applied ocean research, 2017, 67: 109?124.
[6] 高松,徐江玲,艾波,等.基于SOA架构的国家海上搜救环境服务保障平台研发与应用[J].海洋预报,2019,36(3):71?77.
[7] BEZGODOV A, ESIN D. Complex network modeling for maritime search and rescue operations [J]. Procedia computer science, 2014, 29: 2325?2335.
[8] MATOS A, MARTINS A, DIAS A, et al. Multiple robot operations for maritime search and rescue in euRathlon 2015 competition [C]// OCEANS 2016?Shanghai. Shanghai: IEEE, 2016: 37?45.
[9] 吕洋,康童娜,潘泉,等.无人机感知与规避:概念、技术与系统[J].中国科学:信息科学,2019,49(5):18?35.
[10] ACCARDO D, FASANO G, FORLENZA L, et al. Flight test of a radar?based tracking system for UAS sense and avoid [J]. IEEE transactions on aerospace and electronic systems, 2013, 49(2): 1139?1160.
[11] OWEN M P, DUFFY S M, EDWARDS M W M. Unmanned aircraft sense and avoid radar: surrogate flight testing performance evaluation [C]// 2014 IEEE Radar Conference. Cincinnati: IEEE, 2014: 201?213.
[12] ZARANDY A, ZSEDROVITS T, NAGY Z, et al. Visual sense?and?avoid system for UAVs [C]// 2012 13th International Workshop on Cellular Nanoscale Networks and their Applications. Turin: IEEE, 2012: 67?75.
[13] DEY D, GEYER C, SINGH S, et al. Passive, long?range detection of aircraft: towards a field deployable sense and avoid system [J]. Proceedings field & service robotics, 2010, 62(1): 113?123.
[14] LAI J, MEJIAS L, FORD J J. Airborne vision?based collision?detection system [J]. Journal of field robotics, 2011, 28(2): 137?157.
