基于ADAMS 物料抓取机器人的动力学与运动学分析
2020-12-25 12:39曾绍连
机器人技术与应用 2020年5期
曾绍连
(上海市增材制造协会,上海,201600)
0 引言
随着社会的发展、科技的进步,现代工业智能化水平越来越高,而工业机器人作为当代工业智能化应用的一部分,以其自身独特优势在工业各领域得到了越来越广泛的应用[1]。工业机器人在其生产过程中,不仅降低了劳动成本,使得生产效率与产品质量大幅提升,而且克服了恶劣的环境影响,使得生产过程实现持续运行[2]。生产中应用机械手臂,可以代替人类在高温高压、高腐蚀性等恶劣环境中完成指定任务,以及在精度要求高与重复性较大的生产过程中,完成抓取、搬运、装配等动作[3]。在国外,工业机械手臂产品已经具有了成熟完善的行业标准,而在国内这个领域还需完善,这为工业机械手臂的发展提供了广阔的应用前景[4]。
机械手臂是由多个关节、多个连杆和末端执行器组成的,能够完成特定功能的机构。机械臂具有机械强度可靠、速度快和臂架结构简单等特点[5-6]。为了更好地分析和研究物料抓取机器人的机械手臂的性能及操作,笔者建立了两种物料抓取机械手臂的模拟样机,导入到ADAMS 中生成虚拟样机模型并进行分析。
虚拟样机技术又称机械系统动态仿真技术,是从整体分析和解决产品整体性能角度出发,来改进产品设计、提高产品性能的新技术。利用虚拟样机技术模拟产品的工况,在虚拟环境下进行仿真分析,能实现在设计阶段进行产品性能的预测,避免使用物理样机进行性能评测造成的成本增加[7]。
1 理论分析
机器人机械手臂设计模型主要有手部、运动机构和控制系统三大部分组成。手部是用来抓持工件(或工具)的部件,根据被抓持物件的形状、尺寸、重量、材料和作业要求而有多种结构形式,如夹持型、托持型和吸附型等。
本文结合自动化生产线中对包装后的产品需要切换工位的要求,在满足效率的情况下,设计两种小型的机械手臂结构,一种是夹持型机械手臂,另一种是吸附型机械手臂,其结构和工作原理见图1。
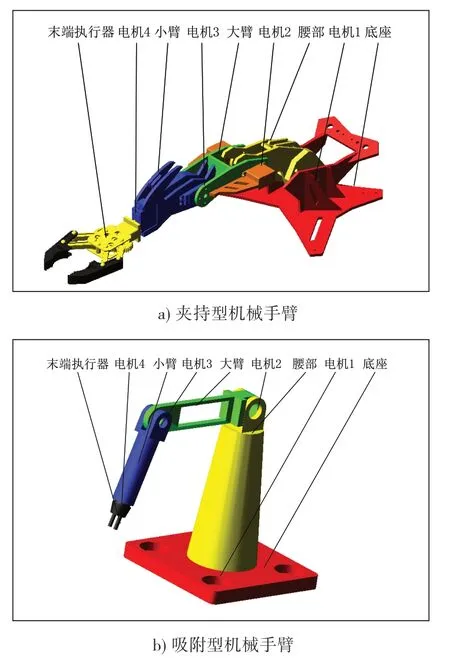
图1 机械手臂的系统组成
机械手臂主要由底座、腰部、电机、大臂、小臂和末端执行器等组成。底座固定在设备上,在机械手臂需要旋转时,电机1 启动,在齿轮传动系统的作用下,腰部等部件开始绕着底部的轴线做旋转运动。在电机2、电机3 和电机4 的组合作用下,末端执行器可以到达机械手臂运动空间的任意位置,最终使机械手臂的末端执行器将产品抓取至指定位置。该机械手臂主要应用在自动化生产线上,当产品完成某一工序后,由机械手臂抓取到指定位置,进行下一步工序。
机械手臂的刚性直接影响到抓取工件时动作的平稳性、运动速度和定位精度。如刚性差则会引起手臂在垂直平面内的弯曲变形和水平面内侧向扭转变形,手臂就会产生振动,或动作时部件卡死而无法工作。为此,机械手臂一般都采用刚性较好的导向杆来加大手臂的刚度,各支承、连接件的刚性也有一定的要求,以保证能承受所需要的驱动力。手臂的结构要紧凑小巧,才能使手臂运动轻快、灵活;在运动臂上加装滚动轴承或采用滚珠导轨也能使手臂运动轻快、平稳。此外,对于悬臂式的机械手,还要考虑零件在手臂上的布置,需计算手臂移动零件时的重量对回转、升降、支撑中心的偏重力矩。偏重力矩对手臂运动很不利,偏重力矩过大,会引起手臂的振动,在升降时还会发生一种沉头现象,另外也会影响运动的灵活性,严重时手臂与立柱会卡死。
2 振动分析
在SolidWorks2018 中建立机械手臂三维模型,定义模型为jixieshoubi。然后将模型导入ADAMS 中,对机械臂模型添加约束,将各部分装配成一个整体。
根据设计要求,机械臂各关节采用电机驱动,故需要对4 个关节分别添加旋转副,对基座添加固定副,详细约束如表1 所示。
设置仿真时间5.0s,步数Steps 为200,观察无重力影响时的运行过程。开始仿真,并保持在仿真状态,仿真结束后,返回初始状态,打开重力对话框,重力方向设置为-y 方向,完成重力的设置;将ADAMS 调到经典模式,打开输入通道,分别设置x、y、z 向输入通道,并选择Swept Sine,设置相位角为0,力的最大振幅为1;从菜单栏选择ADAMS/Vibration,分别设置运动学加速度在x、y、z 方向的输入通道,并选择Swept Sine,设置幅值为9806.65,相位角为0;查看建立的激振器,打开激振器浏览对话框,设置其Begin 为0.1,End 为100,Step 为100,其他保留默认值。从菜单栏Vibration定义输出通道,在输出函数类型选择预定义,分别建立.jixieshoubi.p1_center_x_dis、.jixieshoubi.p1_center_x_vel 等输出通道。如表2 所示。
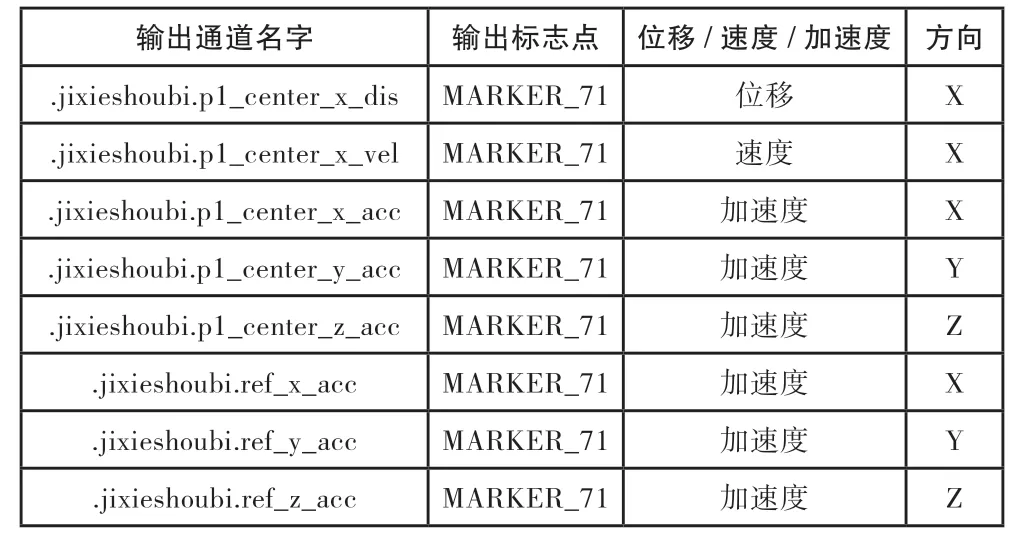
表2 输出通道
菜单Vibration →Test →Vibration Analysis,选择新的振动分析,并进行垂直方向的分析,对整体模型进行线性化,进行受迫振动分析;默认设置添加阻尼,并设置开始为0.1,结束为1000,步数为400;选择模态能量计算。系统进入后处理模块,显示系统的模态信息。查看各阶模态信息,如表3 所示。绘制模态坐标,如图2、图3 所示。

表3 各阶模态信息
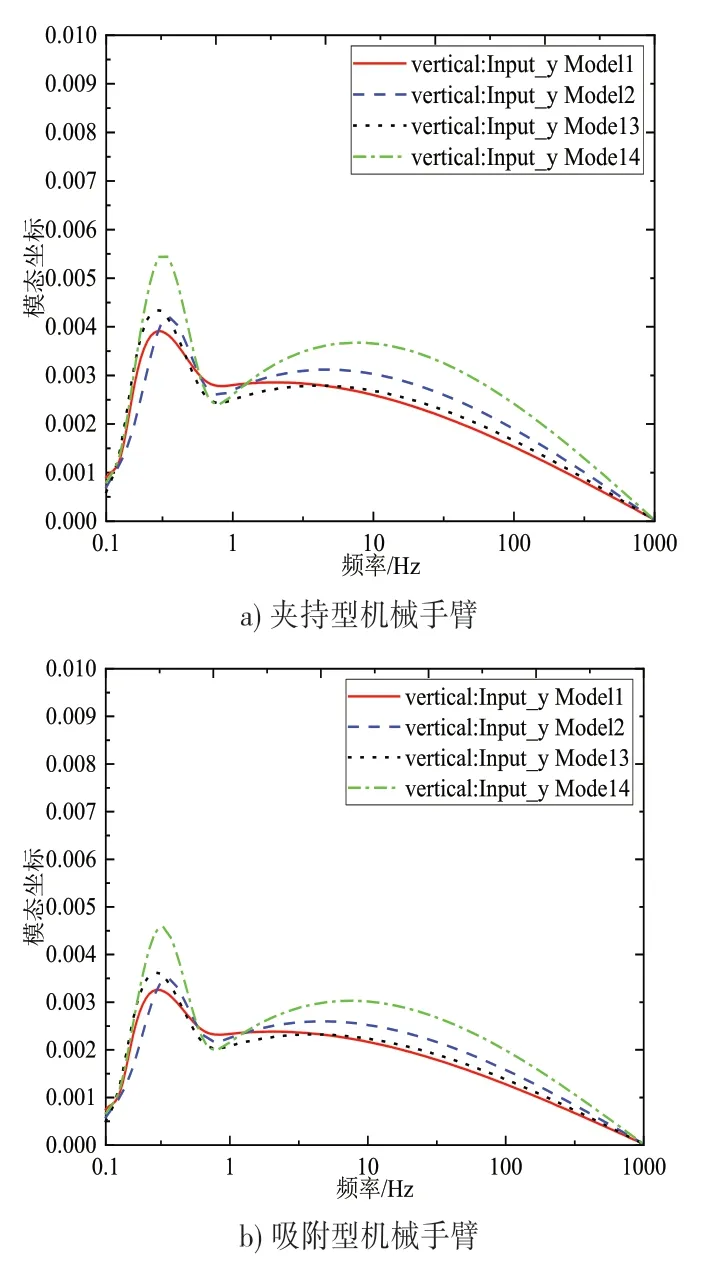
图2 模态坐标图(1-4 阶)
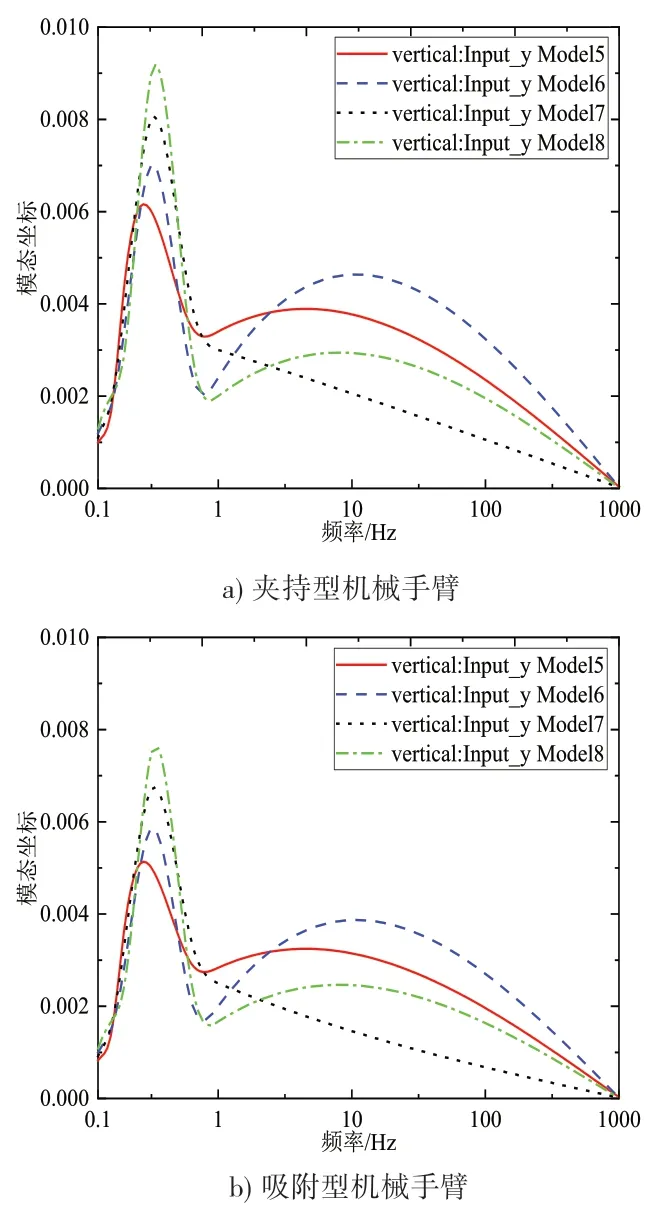
图3 模态坐标图(5-8 阶)
3 关节受力分析
本物料抓取机械手臂主要有4 个关节(JOINT_1,JOINT_2,JOINT_3,JOINT_4),每个关节处所创建的约束均为转动副,定义机械手臂的各个部件材料属性均为steel。现分析机械手臂各个关节受力情况,分别施加机械手臂电机4(JOINT_4)的旋转速度为3600r/min 和360r/min,仿真时间设置为2s,步数为2000,分析机械手臂各个关节处所受的力随时间的变化关系,以及各个关节方向力的波动幅度。
对于夹持型机械手臂,关节1(JOINT_1)为底座与腰部铰接的旋转副,其在末端执行器不同的旋转速度所受的力随时间的变化曲线如图4a 所示,受力范围均在-75N~25N。关节2(JOINT_2)为腰部与大臂铰接的旋转副,其在末端执行器不同的旋转速度所受的力随时间的变化曲线如图4b 所示,受力范围均在-65N~30N。关节3(JOINT_3)为大臂与小臂铰接的旋转副,其在末端执行器不同的旋转速度所受的力随时间的变化曲线如图4c 所示,受力范围均在-20N~40N。关节4(JOINT_4)为小臂与末端执行器铰接的旋转副,其在末端执行器不同的旋转速度所受的力随时间的变化曲线如图4d 所示,受力范围均在-15N~10N。
对于吸附型机械手臂,关节1(JOINT_6)在末端执行器不同的旋转速度所受的力随时间的变化曲线如图5a所示,其受力范围均在-100N~50N。关节2(JOINT_7)在末端执行器不同的旋转速度所受的力随时间的变化曲线如图5b 所示,其受力范围均在-55N~25N。关节3(JOINT_8)在末端执行器不同的旋转速度所受的力随时间的变化曲线如图5c 所示,其受力范围均在-20N~30N。关节4(JOINT_9)在末端执行器不同的旋转速度所受的力随时间的变化曲线如图5d 所示,其受力范围均在-13N~8N。
末端执行器的旋转速度对机械臂各个部件影响较小,机械手臂末端执行器的旋转速度大小与机械手臂各个部件的所受力的大小相关性较弱。吸附型机械手臂的关节方向力波动幅度小于夹持型机械臂,吸附型机械手臂腰部的宽度和厚度较大,刚度比较高,可以保证承受所需要的驱动力,末端执行器的旋转速度变化,其各个关节方向力比较平稳。
现分别施加机械手臂的大臂(JOINT_1)处的旋转速度为3600r/min 和360r/min,仿真时间设置为0.1s,步数为2000,分析机械手臂的各个关节受力。
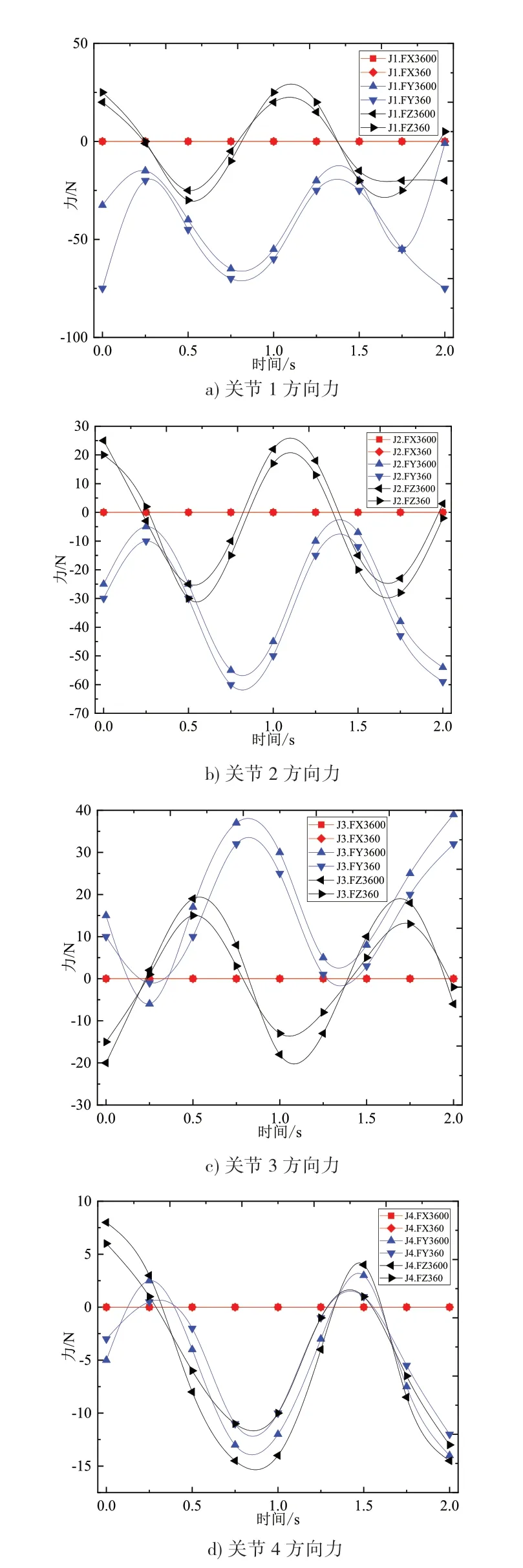
图4 各关节方向力(夹持型机械手臂)

图5 各关节方向力(吸附型机械手臂)
对于夹持型机械手臂,JOINT_1,JOINT_2,JOINT_3,JOINT_4 在大臂旋转速度3600r/min 所受的力随时间的变化曲线如图6a 所示。JOINT_1 y、z 方向力范围在-3900N~3900N 波动,JOINT_2 y、z 方向力范围在-3600N~3500N 波动,JOINT_3 y、z 方向力范围在-2700N~2700N 波动,JOINT_4 y、z 方 向 力 范围在-1200N~1200N 波动。JOINT_1,JOINT_2,JOINT_3,JOINT_4 在大臂360r/min 的旋转速度所受的力随时间的变化曲线如图6b 所示。JOINT_1 y、z 方向力范围在-35N~37N 波动,JOINT_2 y、z 方向力范围在-19N~36N波动,JOINT_3 y、z 方向力范围在-13N~28N 波动,JOINT_4 y、z 方向力范围在-4N~15N 波动。
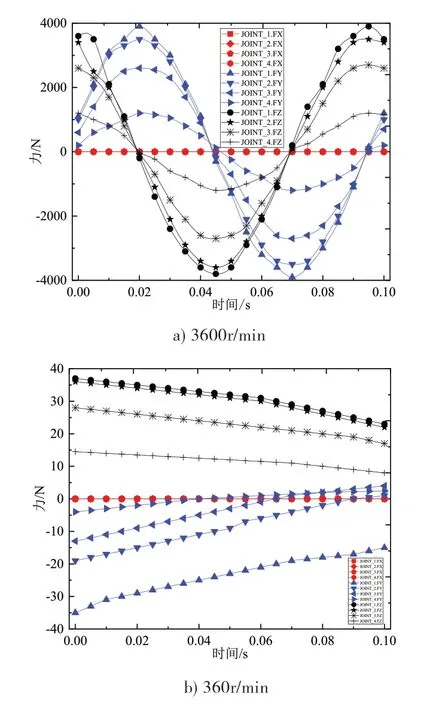
图6 关节1-4 方向力(夹持型机械手臂)
对于吸附型机械手臂,JOINT_6,JOINT_7,JOINT_8,JOINT_9 在大臂旋转速度为3600r/min 时所受的力随时间的变化曲线如图7a所示。JOINT_6 y、z方向力范围在-3800N~3800N波动,JOINT_7 y、z 方向力范围在-3300N~3250N 波动,JOINT_8 y、z 方向力范围在-2300N~2300N 波动,JOINT_9 y、z 方向力范围在-890N~900N 波动。
JOINT_6,JOINT_7,JOINT_8,JOINT_9 在 大 臂360r/min的旋转速度所受的力随时间的变化曲线如图7b 所示。JOINT_6 y、z 方向力范围在-40N~18N 波动,JOINT_7 y、z 方向力范围在-19N~30N 波动,JOINT_8 y、z 方向力范围在-13N~25N 波动,JOINT_9 y、z 方向力范围在-3N~14N波动。
大臂所选的旋转速度越大,机械手臂各个部件在y、z 方向力波动也越剧烈,机械手臂大臂处的旋转速度较小时,机械臂各个部件受力较小,并且力的变化较小。与大臂越接近的部件所受的力越大,变化范围也越大,大臂所选的旋转速度不同对各个部件y、z 方向所受力的大小影响较大,运动速度越快,所受的力也就越大,并且波动幅度较大。
吸附型机械手臂的关节4 方向力波动幅度小于夹持型机械臂,吸附型机械手臂偏重力矩较小,引起手臂的振动幅度较小,大臂的旋转速度变化,其各个关节方向力比较平稳。
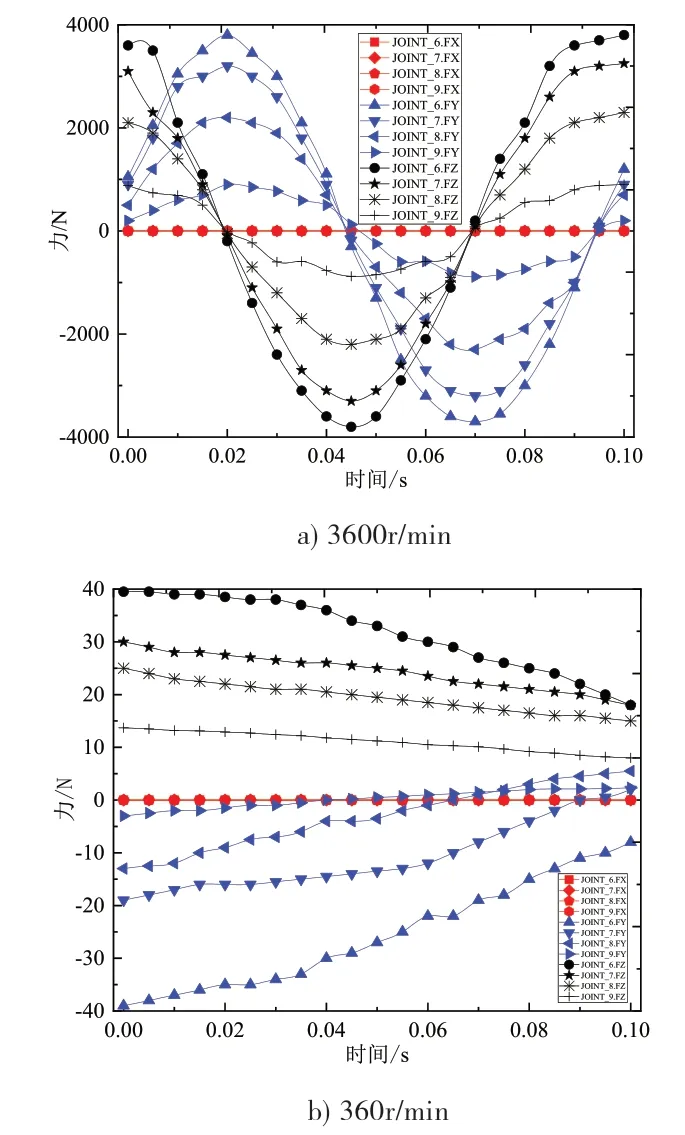
图7 关节1-4 方向力(吸附型机械手臂)
4 总结
根据自动化生产线的要求,本文设计了一种小型的适合自动化生产线使用的物料抓取机器人结构。为了得到机械手臂各个关节处所受的力随时间的变化曲线、铰链处的动态作用力,本文对机械手臂进行了动力学仿真分析。对比两种类型的物料抓取机器人,以及不同参数下的仿真对比分析,结果表明:机械手臂在执行空间工作时,电机转速越大,各个部件所受的力越大,力的大小幅值波动也越大。机械手臂底座对机械手臂整体稳定性有很大影响;在设计控制系统时,在保证效率的前提下,应使机械手臂的大臂运动速度尽量小,从而可以有效地避免作用力急剧增加;提高机械臂的刚度,可以提高机械臂的频率,增强稳定性;设计手臂时离回转中心尽量接近,以减少偏力矩,降低手臂的振动,提高抓取工件时动作的平稳性。
猜你喜欢
环境技术(2021年4期)2021-09-11
今日农业(2020年14期)2020-12-14
制造技术与机床(2019年8期)2019-09-03
制造技术与机床(2017年9期)2017-11-27
载人航天(2016年4期)2016-12-01
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
少儿科学周刊·少年版(2015年4期)2015-07-07
综合智慧能源(2014年1期)2014-09-10
中国工程机械学报(2014年3期)2014-05-25