基于图像处理的枣树喷药装置设计
2020-12-24 07:53门顺刘家君张静黄薇吕奇珊朱斌斌
农业科技与装备 2020年4期
门顺 刘家君 张静 黄薇 吕奇珊 朱斌斌

摘要:新疆枣树种植面积不断扩大。针对枣树病虫害防治存在劳动强度大、对施药者健康危害大、污染大等问题,设计一种小型枣树喷药装置。该装置基于图像处理,能在喷药过程中基本实现对叶片的识别匹配,达到了预期设计要求,为枣园病虫害防治提供了一种新装备。
关键词:枣树;喷药装置;HaarTraining算法;图像处理;设计;试验
中图分类号:S491 文献标识码:A 文章编号:1674-1161(2020)04-0024-03
现代农业发展中,植保机械对病虫害防治及增加粮果产量起到关键作用,并以其高效率、低污染的优势在林果业中得到广泛应用 。国内外相关学者对植保机械进行了各方面研究,其中用于果园喷药的机械装置主要有背负式喷雾器、压缩式喷雾器和踏板式喷雾器,其结构简单、成本低廉,在我国果园喷药作业中应用广泛。但在果园植保机械发展中,根据果树自身状态进行喷药或施肥的研究尚有不足,随着农业机械向自动化方向发展,智能化果园喷药装置研究得到关注。喷药机器人最早起源于日本,属于农业机器人的一种,其果园移动平台上安装多种传感器设备和喷药装置以及控制器等电气原件,通过检测目标信息和控制喷药执行部件,来实现对目标作物准确、高效喷药功能。我国在农业机器人研究方面虽起步较晚,但已研究出不同类型的农业喷药机器人,主要用于果树种植。新疆枣树种植面积较大,且枣树叶、茎与树干的颜色和形状有着明显区别,这就使得图像识别相对简单。针对新疆枣园智能喷药,设计一种基于图像处理的小型枣树喷药装置。
1 总体结构设计
基于图像处理的小型枣树喷药装置主要由机械部件和控制系统两部分组成,如图1所示。机械部件主要包括机架、行走系统和喷药装置;控制系统主要由Arduino控制模块、电源模块、图像采集模块、执行电机以及驱动模块组成。行走系统采用履带式行走机构,能很好地适应枣园复杂地形环境;喷药装置由喷头、药箱以及喷头支臂等组成,喷头与地面相对位置可通过控制喷头支臂不同形态来进行调节,以使喷药均匀,同时,图像采集模块安装于喷头下方的喷头支臂上,随支臂移动收集枣树信息;控制系统主要用于处理图像信息,并依据图像信息控制喷药系统进行作业。
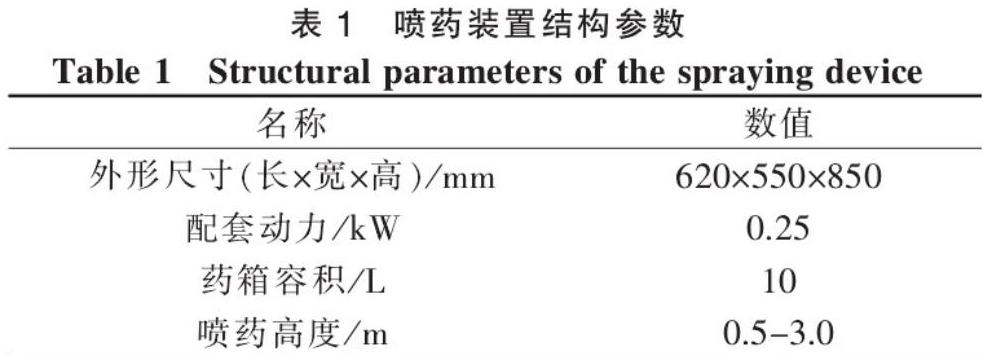
工作原理:由电机驱动行走机构前进、后退或转向,图像采集装置通过摄像头采集现场作业环境和叶片图像并反馈给控制器,药液供给装置将药液输送至喷头;喷药机械臂根据不同果树形状,调节喷药竖直和水平方向上的角度,对果树进行定向喷药;雾化调节机构根据实际喷雾需求调节雾化效果。主要结构参数如表1所示。
2 图像处理模块程序选择与设计
实现图像目标检测通常需要以下3个阶段:一是创建样本;二是训练分类器;三是利用训练好的分类器进行目标检测。
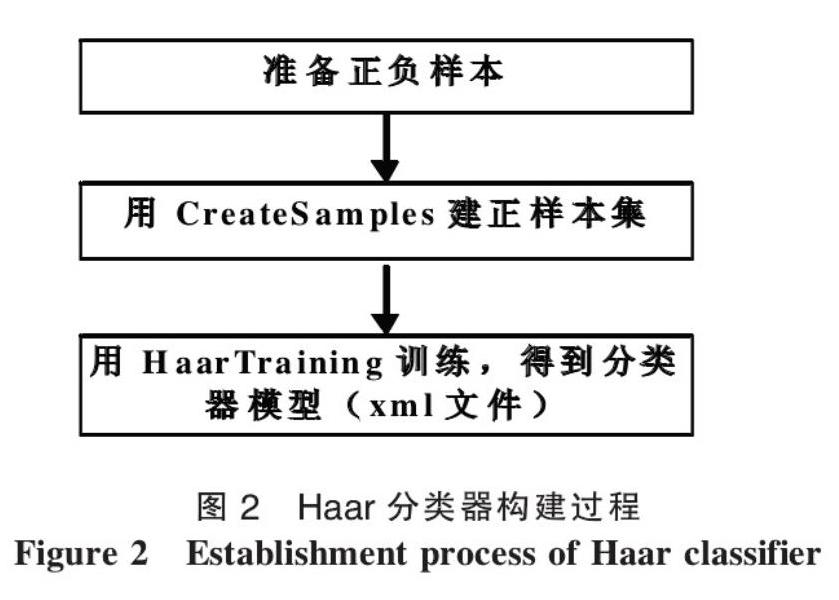
HaarTraining可用于自然条件下通过对枣树叶片外形和颜色加以分析并对样本进行训练,获得1个有效的样本分类器。然后,将采集的图像信息与分类器中的数据进行比对,框选出枣树树叶在图像中的主要位置,并将框选部分截取、保存,作为图像预处理源图。Haar分类器的构建过程见图2。
2.1 采集正负样本
正负样本是在自然环境条件下使用图像采集装置拍摄大量枣树叶片作为样本,并将所有样本进行裁切和缩放,使其成为尺寸较为统一和规整的图片。正样本是将每张图片中枣树树叶特征部分勾选出来并保存,如图3所示。负样本则与正样本相反,不能含有正样本的特征,如图4所示。
2.2 建立样本集
进行HaarTraining训练时,所用的正负样本文件格式为vec格式,所以在训练之前需要通过OpenCV的CreateSamples 程序,并将前期制备好的正负样本转换为vec文件。其中,正样本处理方法步骤如下:
1) 制作一个描述性文件。该描述文件用于对正样本存储路径(包括相对路径和绝对路径)、正样本在图中位置以及样本数目进行描述。
2) 运行 CreateSamples 程序。如果直接在VC环境下运行,可在 Project\Settings\Debug属性页的 Program arguments 栏设置运行参数。
3) 运行结束会生成一个*.vec格式文件。该文件是由正样本数目、尺寸大小、宽高数值及样本其他数据组成。
处理负样本时,其图像只要比正样本大即可。OpenCV在处理负样本时,通常从负样本图片中截选一块与正样本相同尺寸的区域作为负样本。具体程序查询函数icvGetNextFromBackgroundData。具体抠图过程如下:
1) 以左上角坐标(Point.x, Point.y)为基准,确定抠图区域。
2) 找到一个最佳的缩放比例,使原负样本图片缩放后能刚好包含所选中的负样本区域。
3) 通过计算好的缩放比例对原负样本图片进行缩放,使其满足要求。
4) 在缩放后的图像上抠出负样本。
训练流程图如图5所示。
2.3 构建分类器模型
分类器的构建是在完成对vec文件中枣树树叶图片数据处理后实现的。分类器尤其需要对图片中枣树树叶的外形和颜色特征进行识别和提取,最终使分类器能从自然背景下框选出枣树叶片。
3 试验及效果
2019年11月于新疆农业大学完成样机试制,对采集的100幅含有不同背景和光照条件的绿萝叶片图像进行 HaarTraining 训练并求出分类器。使用HaarTraining将绿萝叶片从图片背景中截选出来后发现,图像采集装置分辨率较低,且易受各种噪声干扰,外界光线也会影响图片画质质量。为了有效改善画质质量、避免噪声干扰,在采集图片分割之前需对图像进行平滑处理,源图框选结果如图6所示。试验结果表明,通过图像采集叶片信息,该喷药装置可实现叶片喷药作业,且喷头支臂动作流畅、喷药效果明显,基本实现样机预期各项作业功能。
4 结论
新疆是我国林果种植大省。针对新疆枣树传统病虫害防治方式存在的劳动强度大、健康危害大、农药污染大等问题,结合枣园喷药作业特点,设计一种基于图像处理的小型喷药装置。该装置可对树叶进行简单识别并实施有针对性的喷药作业,喷药均匀,适应各种作业环境和不同高度果树施药作业要求,基本達到设计指标要求。但样机的控制装置并未实现自动循迹功能,可对该装置在不同环境下的工作情况进行检测,并进一步完善功能,此外,样机外观质量有待提高。
参考文献
[1] 龚艳,张晓,刘燕,等.基于层次分析法的植保机械适用性综合评价方法[J].农业机械学报,2016,47(9):73-78.
[2] 王杰,陶振洋,茹煜,等.风机在农林植保机械中的应用研究现状及展望[J].中国农机化学报,2016,37(9):67-74.
[3] 蔡晨,薛新宇,丁素明.小型助力推车式果园喷雾机的研制[J].中国农机化学报,2013,34(1):134-136.
[4] 邱白晶,闫润,马靖,等.变量喷雾技术研究进展分析[J].农业机械学报,2015,46(3):59-71.
[5] 林立恒 ,侯加林 ,吴彦强 ,等.高地隙喷杆喷雾机研究和发展趋势[J].中国农机化学报,2017,38(2):38-42.
猜你喜欢
电子产品世界(2022年4期)2022-04-21
扬子江(2020年4期)2020-08-04
农民致富之友(2019年28期)2019-10-21
家庭科学·新健康(2019年7期)2019-08-21
东坡赤壁诗词(2018年6期)2018-12-22
软件导刊(2017年4期)2017-06-20
高中生学习·高三版(2017年6期)2017-06-12
创新作文(1-2年级)(2016年12期)2016-12-26
卷宗(2014年10期)2014-11-19
山西果树(2014年4期)2014-09-22