
基于平滑A*算法的仓储物流机器人路径规划
2020-12-24 06:30冯京伟陈海霞刘天鹏
无线互联科技 2020年21期
冯京伟,陈海霞,刘天鹏
(三江学院 机械与电气工程学院,江苏 南京 210012)
0 引言
电子商务迅猛发展,为仓储物流带来了新的需求和挑战。其发货单位小型化,品种多、批量小、批次多、周期短,传统依靠人工的仓储物流难以适应新的需求,基于移动机器人的自动化仓储技术正在兴起。将自主移动机器人引入仓储空间中,代替人工搬运货物,可以有效地减少工人的劳动强度,降低维护成本,提高运行效率。要实现一个机器人化的自动化仓储环境,关键的问题就是移动机器人的路径规划,使机器人在自动避障的前提下,规划最优路径到达目标点。
1 A*算法路径规划的优势
1.1 常见的路径规划算法
目前,已有多种算法被应用到路径规划中。传统算法主要有图形方法和智能方法,其中图形方法包括路图法、栅格法等;智能方法包括遗传算法、蚁群算法、Dijkstra算法等智能算法及其混合形式也用来解决路径规划问题。在智能算法中,如遗传算法存在编码长度变化范围大,求解效率低,求解规模小等问题[1]。Dijkstra算法直接搜索全局空间而不考虑目标信息,导致路径求解时间长,难以满足快速规划路径的需求[2]。
1.2 平滑A*算法的基本思想和优点
f(p)=g(p)+h(p)
(1)
其中,f(p)是代价函数,g(p)是起点到当前节点p的最短路径值,h(p)是当前节点n到目标的最短路径的启发值。当新的g(p)值大于之前的g(p),则用新g(p)代替之前的g(p);而h(p)的替代原则刚好相反,当新的h(p)小于之前的h(p)值才发生替代。应用这样的代价函数策略,是可以找到最短路径的,也就是可采纳的。这种应用这种代价函数的最好优先算法就是A*算法的基本思想。
A*算法规划后的路径存在一些问题,比如很多折线和转折点,不适用于仓储物流机器人的运行特点。为了提升线路质量,深入研究A*算法并进行改善,建立平滑A*算法方法并给出比较结果。仿真结果表明,平滑A*算法进行的路径规划更适用于仓储物流机器人的应用领域。
2 A*算法程序仿真
2.1 设计概述
本设计将仓储物流机器人作为研究对象,实现其路径规划。
2.1.1 建立栅格地图
采用行列划分的矩阵存储方法在地图上建立的栅格,每个方格的坐标信息记录在栅格存储阵列中的第m行、第n列,记为G(m,n)。采用这种“栅格—存储”的映射办法,可以建立起整幅地图。建立栅格后,对模型进行信息的编码。编码格式的基本思想如下:
1——当前栅格有障碍;
0——当前栅格无障碍。
在实际应用中,机器人路径规划为二维结构化空间,假设障碍物的位置和大小已知,并且在机器人运动过程中,障碍物的位置和大小都不发生变化;用尺寸相同的栅格对 机器人二维工作空间进行划分,按照机器人及空间的大小确定栅格数目,栅格大小以机器人可以在其中运动为限[3]。
秉持分布式系统无法同时兼顾一致性、可用性与分区容忍性(CAP)原理[8],中本聪设计了PoW共识机制。现阶段常见共识算法其中一类为证明类共识,即Proof of X共识方案,是在PoW共识方案之上的变种,将PoW改换为其余证明。PoW算法现阶段依然盛行,使用PoW共识的代表货币比特币依然占据最大市值。
2.1.2 算法流程
当从初始点向目标点移动时,据前述f(p)=g(p)+h(p),A*算法会权衡g(p)和h(p)的值,每次进行主循环时,它检查f(p)最小的结点p,将在当前的open list中选择f值最小的相邻栅格作为下一个已选定栅格,并将当前已选定栅格作为该相邻栅格的父栅格,移入close list,将父栅格依次连接起来,完成寻路。
2.2 基本A*算法仿真
通过程序来在栅格地图上设置障碍物来模拟仓储空间中的货架,然后进行A*算法路径规划,如图1所示。
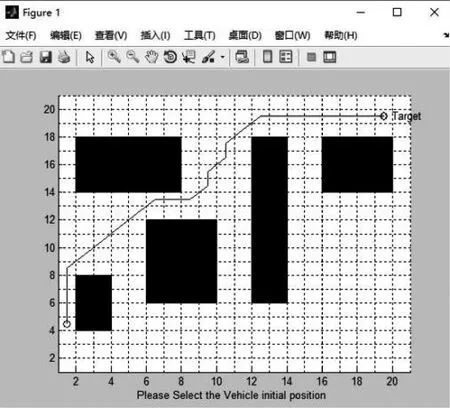
图1 障碍物格局
从图1可以看出,利用A*算法自动规划路径的转折较多,如果在实际应用中使用这个程序来控制机器人调度,虽然可以完成任务,但是在机器人每次遇到障碍物需要转弯时,就必须减速到零转弯,然后再启动加速,如果连续遇到多个障碍物,那么机器人的运行时间将会加长;而且不断地启动停止,不仅使机器人的能耗增加,而且对机器人本身的寿命也有所影响,所以必须对机器人的路径进行平滑。
2.3 路径平滑方法
本文研究了多种路径平滑方法,以下两种平滑方法的路径模拟运行仿真如图2所示。
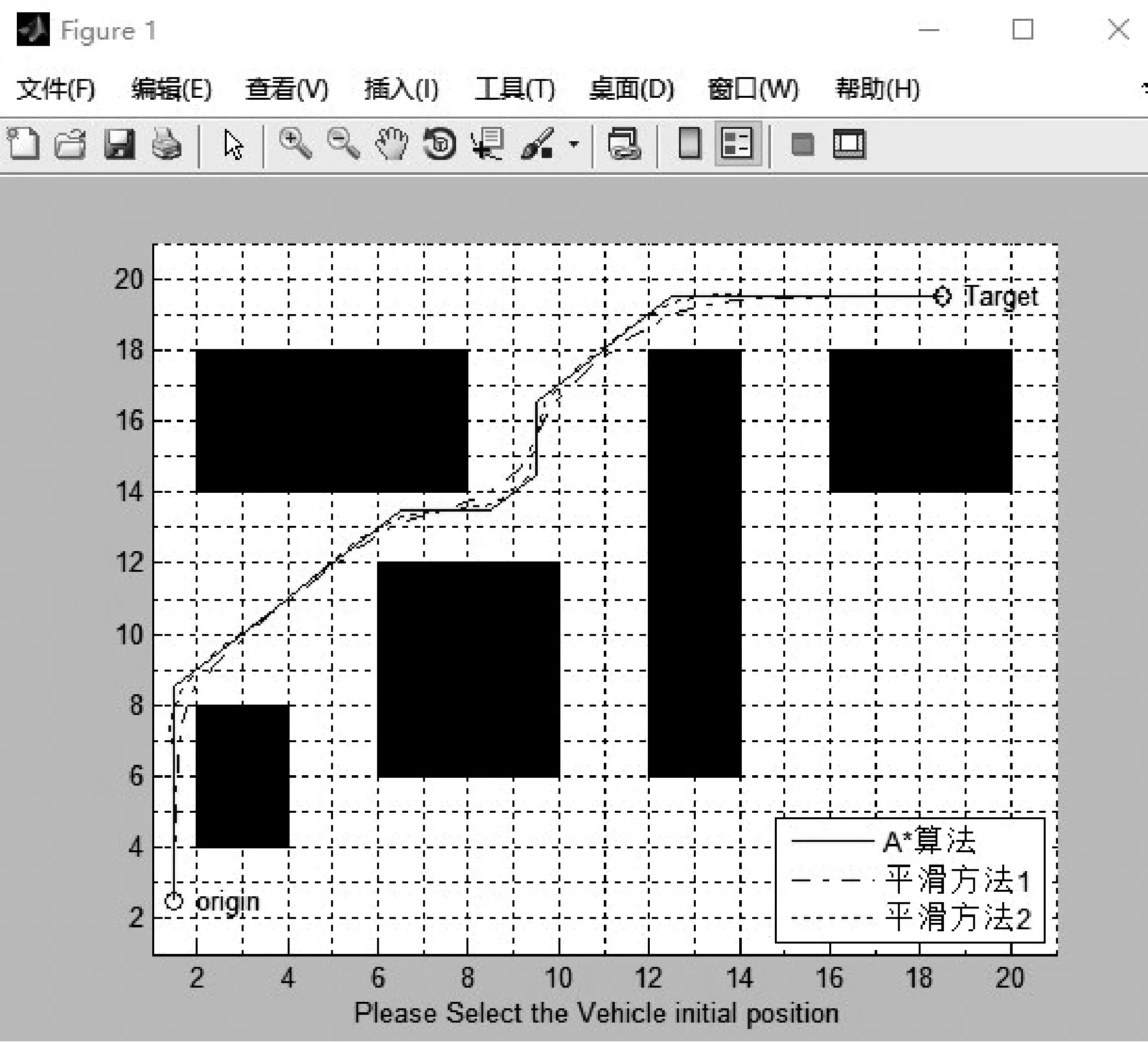
图2 平滑后曲线
(1)利用MATLAB软件自带的函数smooth函数。yy=smooth(y,span,sgolay),式中yy为平滑后的纵坐标值,y为原纵坐标值,span为移动平均滤波器的窗宽,span为奇数,sgolay为Savitzky-Golay滤波器的窗宽,由span参数指定;横坐标也做相同的处理。
(2)自定义函数SmoothPath。基本思想是对原路径进行分析,设置权重和平滑因子,根据原路径与新路径当前点的差值进行加权,并对路径中上一个点、下一个点与当前点的差值乘平滑因子,在一定的容忍度范围内,自动进行重复计算,得到平滑后的新路径。
3 结语
针对A*路径规划算法在仓储物流机器人应用中的不足,提出了改进的A*路径规划算法,引入平滑路径的处理,不仅优化了路径,且能平滑转折角度,仿真结果验证了算法的有效性。实际应用中平滑A*算法为障碍物随机分布、大规模栅格情况下机器人规划出的路径有转折次数少、转折角度小等优点,能满足工程需求。
猜你喜欢
科技创新与应用(2021年31期)2021-11-09
小学生学习指导(当代教科研)(2021年6期)2021-05-23
马克思主义哲学研究(2020年1期)2020-11-26
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
人大建设(2019年12期)2019-11-18
弹箭与制导学报(2015年1期)2015-03-11
发明与创新(2015年17期)2015-02-27
雷达学报(2014年4期)2014-04-23
城市道桥与防洪(2014年5期)2014-02-27
