车辆换道汇入控制系统设计
2020-12-23 05:47张敏肖广兵
软件 2020年10期
张敏 肖广兵
摘 要: 面向智能车路系统,本文设计了车辆换道汇入控制系统,由供电模块、STM32处理器模块、车速传感器、摄像机、VANET自组织网络以及上位机管理系统等组成,通过硬件模块的信息获取与汇入控制策略分析,完成服务器系统的单车汇入车队监控显示与管理,通过无线通讯网络完成之间的信息传输交互,确保车辆安全高速平稳汇入车队,提高道路资源的使用率和道路通行率。
关键词: STM32处理器;换道汇入;VANET自组织网络
中图分类号: TP27 文献标识码: A DOI:10.3969/j.issn.1003-6970.2020.10.012
本文著录格式:张敏,肖广兵. 车辆换道汇入控制系统设计[J]. 软件,2020,41(10):4549
【Abstract】: Facing the intelligent vehicle routing system, this paper designs the vehicle lane changing import control system, which is composed of power supply module, STM32 processor module, vehicle speed sensor, camera, VANET self-organizing network and host computer management system, through the analysis of Hardware Module Information Acquisition and Import Control Strategy, the display and management of server system's bicycle import fleet monitoring is completed, and the information transmission and interaction is completed through wireless communication network, to ensure the safe high-speed vehicles smoothly into the fleet, improve the use of road resources and road traffic rate.
【Key words】: STM32 processor; Lane change; VANET self-organizing network
0 引言
目前,傳统车辆的换道汇入因缺乏车路之间的数据共享与安全性评估,无法保证车辆换道汇入的高速性、安全性,容易造成交通堵塞[1],从而降低道路的通行率。随着智能交通技术的发展,由若多个车辆以一定的安全距离编队组成的智能车队[2],由于能够增大单位面积的交通容量,提高道路资源的使用率[3],成为智能交通系统领域的重要研究内容之一。伏雨旋等人对车路协同轨迹跟踪保持的研究,减小了车队跟踪控制的误差,但是仅考虑车辆自身因素,未与车队紧密联系[4],缺乏车辆换道汇入的综合系统研究。
为此,本文设计了一套完整的车辆换道汇入控制系统,从系统设计、硬件设计、软件设计这三个方面研究,分析道路状况和车辆的运行状态,结合先进的无限通信技术、自动控制技术,实现车-路、车-车的信息共享交互,完成车辆的换道汇入,提高社会效益,改善交通拥挤[5]。
1 系统设计
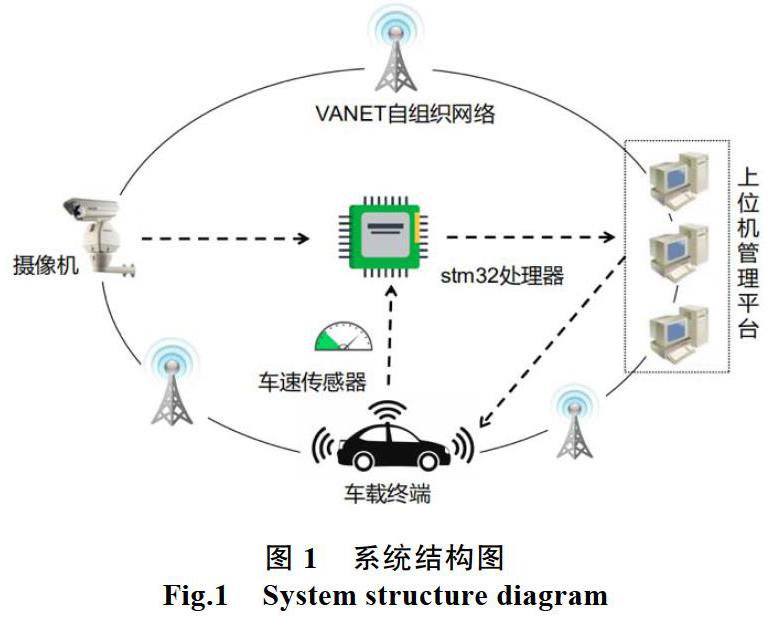
车辆换道汇入控制系统以STM32处理器模块为核心,车速传感器、摄像机等其他硬件模块,通过VANET自组织网络完成道路与车辆的信息传输,并上传到上位机管理系统,监控车辆换道汇入的状态信息,实现车辆安全高速的换道[6]。
系统通过高速专用摄像机采集道路车流量信息和车速传感器信息获取,将车辆运行状态和路况发送到STM32处理器,处理器结合换道汇入的控制算法和安全性评估,为车辆换道设计汇入轨迹,并上传到上位机管理平台,通过管理人员对车辆换道的监控与管理,将换道指示发送给车辆,整个系统通过VANET自组织网络实现车辆与道路信息的互联共享,保证车辆行驶的安全性,实现车辆的换道汇入[7]。
2 硬件电路设计
车辆换道汇入系统的硬件模块主要有STM32主处理器、高速专用摄像机、供电模块、车速传感器和VANET自组织网络组成,以处理器为核心,其他模块通过串口连接,结合VANET自组织网络实现车-路的协同控制,完成车辆的换道汇入控制。
2.1 供电模块
STM32模块一般选用2.0-3.5 V的直流电压,车速传感器采用4.5-20 V的直流电,WiFi模块使用3.3-5 V的直流电压,摄像机模块采用4-5 V的直流电压,供电模块需要将220 V交流电通过二极管、电感和电容器的不断滤波、降压,在LNK304DN开关控制器的作用下,最后电流通过电阻R3转化成5 V直流,为处理器模块、WiFi模块、摄像机模块供电,供电图如图2所示。
2.2 主处理器STM32模块
本文选用STM32F103处理器,是以ARM32位Cortex-M3 CPU为核心,最高工作频率72 MHz,1.25DMIPS/MHz。片上集成Flash和SRAM存储器,内有2通道12位D/A转换器,可以外设ADC,DAC等模拟信号转换器,能容纳多元件,集成度高。车速传感器、摄像机可以通过处理器的串行调试或JTAG接口调试[8],完成STM32的安全启动。处理器在2.0- 3.6 V下电压工作,有3种低能耗方式,可延长电池的寿命,具有高性能、低能耗等特点。具体电路设计如图3所示。
2.3 VANET自组织网络
VANET自组织网络是一项专门应用在车辆通信的移动自组织网络技术,通过车路间设置网络节点,建立一个车路通信平台,使驾驶员在一定范围内快速获得车辆的运行状态信息以及路况数据,实现车车与车路之间的信息交互,提高道路的通行率。
VANET自組织网络的物理层模块选用WiFi网络,WiFi作为无线城域网,传播速度快,网络性能好,覆盖范围广,使用快捷方便,最高宽带可达1 Mbps,WiFi模块选用WM-G-MR-08芯片,与处理器串口通信,可满足VANET自组织网络技术的要求,实现数据的无线传输,安全性高,结构简单。如图4所示的WiFi电路原理图。
2.4 车速传感器
车速传感器是一种检测车辆速度的装置,通过信号的转换,可输出三种信号,这里选用霍尔式车速传感器,利用霍尔效应实现车速的检测,输出霍尔式交流信号[10],汽车指针的摆动受车速影响,传感器的脉冲信号频率越大,车速越大。此传感器具有稳定性强、测速准确度高、防干扰能力强等优点,通过与STM32主处理器的串口连接,处理器参考速度进行控制策略分析,实现车辆换道汇入的车速管理控制。如图5所示的电路图。
2.5 高速专用摄像机
车辆换道汇入需要采集道路状况和汇入车队的信息,本文选用高速专用摄像机,实现车流量的监测与路况监控,这里选用OV7725摄像机,可以对道路上快速移动的车辆快速监控、采样、记录,完成道路的监控[11]。
OV7725摄像机像素可达30万,分辨率髙,寄存器的数据通过SDA、SCL的引脚输入和图像格式、信号的转换,从D0-D9引脚输出信号。OV7725与STM32处理器连接,选用SCCB协议完成数据的输入与输出,如图6所示,实现车辆的换道汇入。
3 系统软件设计
车辆换道汇入控制系统软件设计在Visual Basic 6.0软件搭建。由车辆的编队汇入控制管理作为主功能,加以硬件设备检测、历史数据分析软件设置作为辅助功能。这里主要介绍车辆的换道汇入控制与管理的算法以及主界面设计。
本文建立车辆换道汇入场景,如图7所示,d为车道宽度,V0为汇入车辆,V1,V2,V3为车队的跟随车辆,V0向车队发出换道请求以及车辆位置、运行状态信息,车队通过对V1、V2变速来确保车辆V0的换道汇入,这里设车队的初始速度为,车队的安全距离为c,无横向加速度,V0的转向角为θ,车长为m,车宽为n,位置为(x0, y0),横向加速度为ay,纵向加速度为ax,横向位移,纵向位移 ,,为避免碰撞,V0与V1,V2纵向距离S>0。
最终的最小时间汇入模型为:minT=minF(, c, θ, d, m, n, ax, ay)
图8是车辆的换道汇入界面,通过车载自组织网络,车辆发送换道请求,管理员首先确定系统接收换道请求的范围,选择手动输入或者基于GPS定位确定监控范围,即可出现发送请求的换道车辆车牌号显示,点击其中一辆车,便可以查看车辆信息,所在位置的道路状况,换道汇入的控制与车队的管理。
图9是车辆所在位置的道路状况界面,内有从OV7725获取的道路视频监控,并显示道路的车宽、抗滑能力、承载能力、安全率、通行率等信息,对于当前道路以往的突发事件可查看分析,可方便管理者清晰探测路况以及有效管理,确保道路的安全性、流通性。
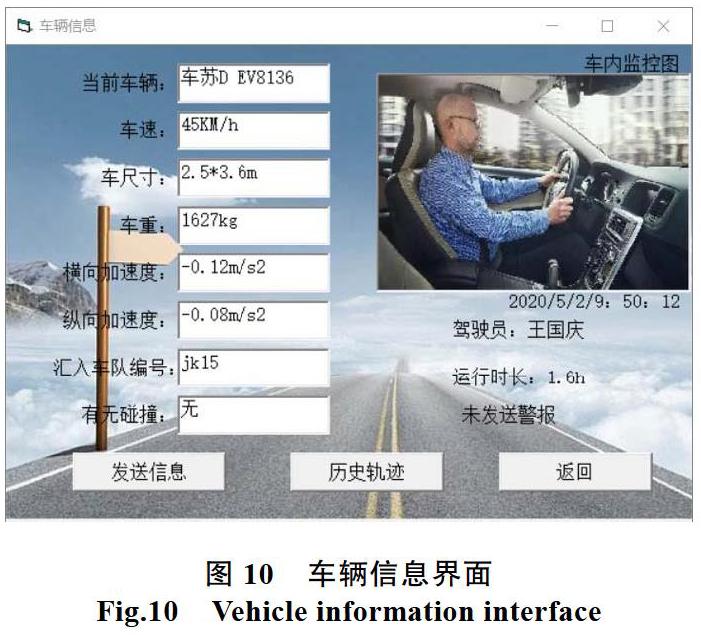
图10是车辆信息界面,内有车辆运行状态信息,包括车速、横纵向加速度、运行时长、重量和尺寸,以及车内视频监控,通过车辆运行状态的直观显示,便于管理对车辆的了解[17],对于车辆的突发事件,管理者通过运行状态可手动管理换道策略,通过无线网络将信息发送给车主,同时管理员也可以查看最近一段时间的车辆历史轨迹。
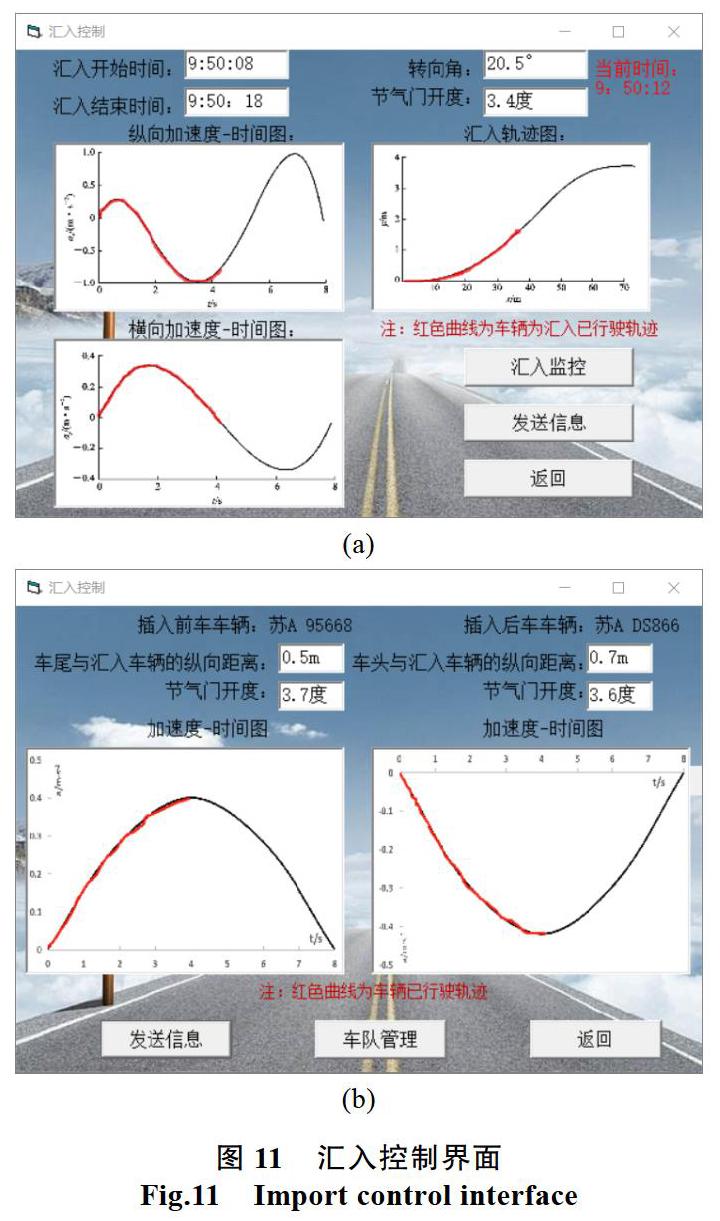
图11是车辆的汇入控制界面。图11(a)是对换道车辆的汇入控制与管理,内有车辆的汇入开始和预期结束时间,车辆的转向角以及节气门开度,同时有车辆在换道时间内的加速度时间图以及汇入轨迹图,黑色曲线表示通过换道策略算法获取的图像,红色表示车辆实际的运行图[13],这些信息均会在车载终端显示。当车辆运行异常时,管理者可以点击汇入监控,查看车辆内部视频监控,并语音发送警报信息,确保车辆安全平稳的汇入。
图11(b)是换道车辆汇入车队的前后车车辆的运行状态分析,内有车辆的加速度时间图,以及实时的与汇入车辆的纵向距离显示[14],避免车辆发生碰撞,并保证车辆以较短时间汇入车队。
图12是车队管理界面,为避免道路拥堵和交通事故的发生,对于车队的长度、车速、安全距离、饱和度设置合理指标,发挥车队的最大作用,通过车队的稳定性分析[15],查看车队车辆的违规行为,当系统检测车辆之间安全距离过大等行为时,将自动发送信息给驾驶员,提醒车主安全行驶[16]。
4 结论
本文借助车载自组织网络技术对车路、车车之间实时的数据交互传输,设计一个车辆换道汇入系统,通过上位机平台的监控管理显示,控制车辆的换道汇入,确保换道车辆在短时间内高速安全汇入车队。该设计方案简单易操作,能够解决车辆的换道时间长、安全性低等问题,硬件设备可满足车辆的换道汇入的信息采集要求,可以在智能车路系统中运用实践。本文以单车换道汇入的系统设计为主,不能满足现实道路中存在的多种复杂情况需求,未来如何控制多车换道汇入是一个重要的研究方向。
参考文献
[1]马育林, 徐友春, 吴青. 车队协同驾驶混成控制研究现状与展望[J]. 汽车工程学报, 2014, 4(1): 1-13.
[2]游峰, 张荣辉, 王海玮, 等. 基于纵向安全距离的超车安全预警模型[J]. 华南理工大学学报: 自然科学版, 2013, 41(8): 87-92.
[3]何杰, 刘霞, 陈一锴, 等. 恶劣天气路面条件对行车安全的影响[J]. 交通运输工程学报, 2011, 11(1): 58-63.
[4]伏雨旋, 李孝银, 吴鹏. 基于时变人工势场PID的智能汽车轨迹跟踪控制[J]. 时代汽车, 2019(7): 17-18.
[5]NIE J, ZHANG J, DING W, et al. Decentralized Cooperative Lane-changing Decision-making for Connected Autonomous Vehicles[J]. IEEE Access, 2016(4): 9413-9420.
[6]姜冬雪. 快速路匝道匯入路段的瓶颈特性及驾驶人换道行为研究[D]. 南京: 东南大学, 2017.
[7]MOHAMMAD A A, YASSER H, TAREK A S. Modeling Driver Behavior and Safety on Freeway Merging Areas[J]. Journal of Transportation Engineering, 2008, 134(9): 370-377.
[8]左康, 刘启远, 孙剑. 城市快速路匝道汇入行为建模及仿真[J]. 系统仿真学报, 2017, 29(9): 1895-1906.
[9]薛行健, 欧阳欢, 陈欢, 等. 匝道布置与设计对快速集散道路通行能力影响[J]. 铁道科学与工程学报, 2017, 14(8), 1799-1804.
[10]郝媛, 孙立军, 徐天东. 交通流Breakdown现象与交通扰动演化模型[J]. 同济大学学报 (自然科学版), 2009, 37(9): 1178-1184.
[11]杨京帅, 任书杭, 马志政, 等. 道路交通碰撞事故致因建模与影响因素试验分析[J]. 东南大学学报: 自然科学版, 2015, 45(5): 1008-1012.
[12]禹伟. 车道变换与交通拥挤致因关系的研究[D]. 成都: 西南交通大学, 2013.
[13]陈永恒, 陶楚青, 白乔文. 基于SVM的快速路合流区车辆间隙选择模型[J]. 东南大学学报: 自然科学版, 2018, 48(4): 752-758.
[14]张荣辉, 游峰, 初鑫男, 等. 车-车协同下无人驾驶车辆的换道汇入控制方法[J]. 中国公路学报, 2018, v.31; No.176(4): 184-195.
[15]范世鹏, 吴广, 王亮, 等. 基于改进人工势场法的飞行器轨迹规划[J]. 航天控制, 2018, 36(1): 50-54.
[16]王华, 张小宁. 走廊通道高架道路匝道设计模型[J]. 交通运输系统工程与信息, 2012(5): 162-167.
[17]任德锟. 基于毫米波雷达的车间位置关系的识别方法[D]. 西安: 长安大学硕士论文, 2012.