
Research on temperature control of heating furnace based on improved ant colony algorithm
2020-12-23 05:16JianxinZHOUJianxiongHUANG
机床与液压 2020年18期
Jian-xin ZHOU,Jian-xiong HUANG
(College of Electrical Engineering,North China University of Science and Technology,Tangshan 063000,China)
Abstract:The temperature control system of reheating furnace has the defects of nonlinearity,time-varying and hysteresis,which results in slow response speed and poor anti-interference ability in the process of system control.The traditional controlmethod cannot control it accurately.The immune algorithm was introduced into the ant colony algorithm.According to the affinity principle of the immune algorithm,the diversity of the ant colony was increased,and the initial pheromone rule of the ant colony was improved.The improved ant colony algorithm was used to adjust the weight of PID neural network(PIDNN),and a new PIDNN controlmethod was proposed.The simulation results show that,compared with the traditional PIDNN controlmethod,when the PIDNN controller based on the improved ant colony algorithm was used to control the heating furnace,the time required for the system to reach the steady state was reduced by about34%;when the disturbance was added,the time required for the system to return to the steady state was reduced by about 26%,the vibration amplitude was significantly reduced,and the anti-interference ability of the heating furnace control system was enhanced.
Key words:Ant colony algorithm,Immune algorithm,PID neural network,Temperature control of heating furnace
1 Introduction
As the first working procedure of the hot rolling line,the heating furnace plays a key role.In recent years,with the rapid development ofmetallurgical industry,the research on temperature control of heating furnace has become an important topic in the field of hot rolling.However,in the actual industrial production process,the heating furnace has the characteristics of nonlinearity, hysteresis and time-varying,which makes it difficult for the traditional controller to achieve better control effecton the temperature control of the heating furnace[1].Some scholars had proposed a PID control method based on the improved Drosophila neural network,which combined the improved Drosophila algorithm with the neural network.The research shows that the algorithm could speed up the response speed of the control system and improved the anti-interference and robustness of the control system[2-4].According to the characteristics of temperature control system,some scholars put forward a PID controller based on fuzzy immune algorithm by combining fuzzy mechanism,immune algorithm and PID controlmode.Itwas found that thismethod improved the efficiency and accuracy of temperature control[5-6].In addition,according to the learningmechanism of neural network and fuzzy control,some scholars ap-plied them to the temperature control of heating furnace.The research show that not only the control accuracy was improved,the temperature of steel embryo wasmore uniform,but also the energy consumption was saved and the yield was increased[7-8].Xue et al.used wavelet neural network to predict the temperature of heating furnace,and modified the parameters of neural network by rolling optimization controller.The research shows that thismethod had good tracking performance for the change of furnace temperature and shorted adjustment period[9].
In the above literature,the dynamic performance of the heating furnace temperature control system had been improved,but the control of the system response speed and anti-interference ability had some limitations.Therefore,this paper used PIDNN controller to control the temperature control process of the heating furnace,and used the improved ant colony algorithm to optimize theweight of PIDNN,which was proved to be superior by simulation.
2 Structure and w orking p rincip le of regenerative heating fu rnace
In the production process of hot continuous rolling,the heating furnace is between the continuous casting system of steel making and the rolling mill of steel rolling.It is an important link and plays an excessive and buffering role.The heating process of the regenerative heating furnace is generally divided into preheating,heating and soaking.The regenerative heating furnace uses the regenerative or regenerative burner to preheat the air or gas,making the furnace temperature more uniform,not only improving the heating quality but also is reducing the energy consumption[10].
As shown in Fig.1 is the structural diagram of regenerative heating furnace,which is composed of burner,reversing valve,furnace,blower,induced draft fan and chimney.
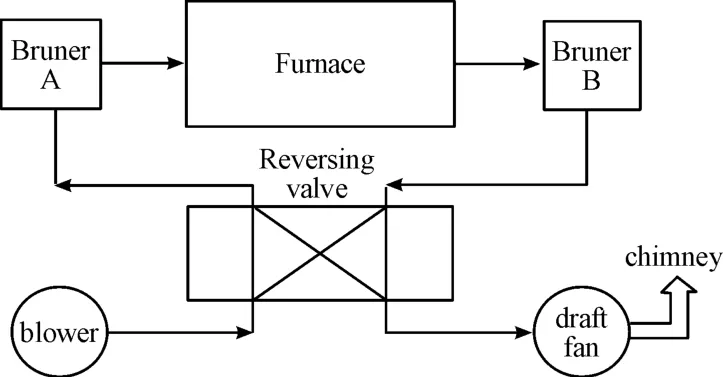
Fig.1 Heating furnace structure diagram
The regenerative heating furnace uses themixture of air and gas as the fuel to heat the steel embryo through the full combustion of the fuel.Its working principle is:the combustion supporting air flows through burner a and is heated to a certain temperature before being used for combustion;at this time,burner B is used for smoke exhaust,and the heat storage body is heated to a certain temperature for energy storage.When the reversing time is reached,the reversing valve works to make the heating furnace system run in the reverse direction,so that the periodic reversing can make full use of the waste heat in the flue gas and save energy.
3 Improved ant colony algorithm
The basic ant colony algorithm itself is not perfect and has some defects,so an improved ant colony algorithm is proposed.In this algorithm,immune algorithm is introduced,and the affinity between antibodies is used to enrich the diversity of ant colony[11-12].
In the iterative process of ant colony algorithm,all antsmove towards the direction of the optimal solution.The difference of ants will gradually weaken;when it reaches the later stage,itwill cause the convergence speed to slow down.It is easy to appear premature phenomenon,falling into the local minimum point,while immune algorithm can solve the defect of ant colony algorithm in the later stage.The calculation formula of affinity between antibodies in immune algorithm was as follows:

Where,p(Ai(k))is the affinity value of ants,f(Ai(k))is the adaptability of ants,d(Ai(k))is the concentration value of ants,was theweight coefficient.
In the basic ant colony algorithm,the initial pheromone quantity of each path is the same,which results in a large interference to the search of the optimal path in the early stage.The algorithm proposed in this paper improved the initial pheromone of ant colony algorithm,used the distance between the total pheromone and the city as the initial pheromone distribution matrix,introduced different weights to each node[13],avoided the blindness of ant’s transfer in the path,improved the speed of ant colony algorithm in the early search,the pheromone update rules are as follows:
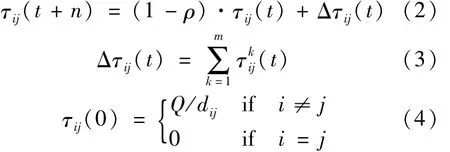
W
here,τij(t)is the amount of information betweeniandjat timet,(1-ρ)is the pheromone residue factor,is the information quantity betweeniandjof antkin this cycle,Qis the total pheromones,dijis the distance betweeniandj.
The improved ant colony algorithm improved the initial pheromone in the early stage,enhanced the guidance of the pheromone to the ant search path in the early stage,and introduced the concept of affinity in the immune algorithm in the later stage,so as to prevent the problem of falling into the localminimum point due to the weakening of ant colony diversity.
4 Fu rnace tem peratu re con troller
The temperature controller of heating furnace usually adopts PIDNN controller.PIDNN has a highly nonlinearmapping ability,and its structure changes with the change of the output.The single output PIDNN is used for the control of the single variable system[14].
In this paper,we used the improved ant colony algorithm to adjust the weight of PIDNN,control the temperature of heating furnace,and improved the traditional ant colony algorithm by using the affinity between antibody and antibody and the principle of improving the initial pheromone update.At the same time,the improved ant colony algorithm was used to train the neural network tofind a set of optimal weights,so as tominimize the error between the output value and the expected value.Firstly,a set of neural network weight parameters was established.Ants started from the initial position toforage,that is,each ant in the ant colony selected aweight in the set of weight parameters,so the whole ant colony would selecta set of neural network weights.Secondly,in the process of ant search,each ant chose the location independently,according to the pheromone and state transition probability of each location.When ants went through a series of locations,they arrived at the location of the food,and finally adjusted the pheromone of each location.The above process was iterative until the required number of iterations or the trend of evolution was not obvious.
The next step was to use the trained neural network and PID controller to control the whole heating furnace temperature control system.The temperature control process of the heating furnace wasmainly divided into two steps.Firstly,the traditional PID controllerwas used to control the closed-loop of the heating furnace and adjust the parameters ofKp,KiandKd.Secondly,according to the current operation state of the temper re control system of the heating furnace,the neural network was used to adjust the PID parameters online tomake the temperature of the heating furnace reached the set value[15].TheKp,KiandKdof PID controller corresponded to the output value of neural network output layer.Through neural network self-learning and improved ant colony algorithm to adjust the weight,the temperature control system of heating furnace could reach steady state.As shown in Fig.2 is the structure diagram of the heating furnace temperature control system.The input of the control system was the deviationebetween the set value of temperature and the output feedback value,and the outputwasy(t).
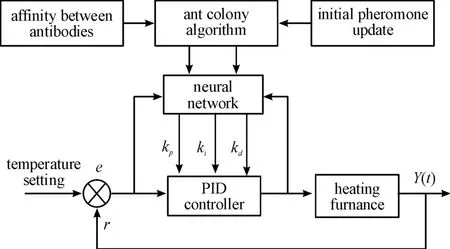
Fig.2 Tem peratu re con tro Isystem struc tu re of heating fu rnace
The state function of SPIDNN at sampling timekwas:
1)Input layer

2)Hidden layer
Proportional neuron:

Integral neuron:

Differential neuron:

3)Output layer

Where,ui(k)was the state of each neuron,neti(k)was the input value of each neuron,i=1,2,3,4,5.
The algorithm flow of the whole heating furnace temperature control system was summarized as follows:
(1)Initialization parameters.
(2)Added the initial position of ants to the tabu list,and started ants.
(3)Ants moved according to the following state transition rules,and added the next position to the tabu table.

(4)Repeated step(3)until all ants completed the search and recorded the current optimal solution.
(5)The initial antibody group was selected from the optimal solution generated by ant colony,and a new generation of antibody group was generated through the calculation of affinity in immune algorithm.
(6)The optimal solution was updated,and each path was updated by pheromone and new rules.
(7)If the maximum number of iterations was reached or the ant colony had all converged,continued to execute downward,otherwise cleared the table and went to step(2).
(8)Determined the neural network structure.
(9)rq(k)andyq(k)were obtained by sampling andJwas calculated.

(10)The state of neurons in each layer of neural network was calculated.
(11)The outputu(k)of PID controller was calculated,and the outputy(k)and the error were calculated.

(12)Through the above-mentioned improved ant colony algorithm for neural network learning,adjusted the weight,realized the adaptive adjustment of PID control parameters.
(13)Calculated and adjusted according to the new weight.If the temperature of the heating furnace reached the set value or had reached the maximum number of iterations,the calculation would be terminated;otherwise,continued to calculate and adjust the neural network.
5 Sim u lation resu lts
In order to verify the effectiveness of the proposed method,the method above was simulated,and the parameters of the algorithm were shown in Table 1.

Tab Ie 1 Param eter se Iection of a Igo rithm
According to the basic parameters provided above,the basic ant colony algorithm was compared with the improved ant colony algorithm in the minimum path length and the number of iterations.As shown in Table 2,compared with the basic ant colony algorithm,the improved ant colony algorithm proposed in this paper improved the efficiency by 65.17%,and reduced theminimum path length by 25.50%.
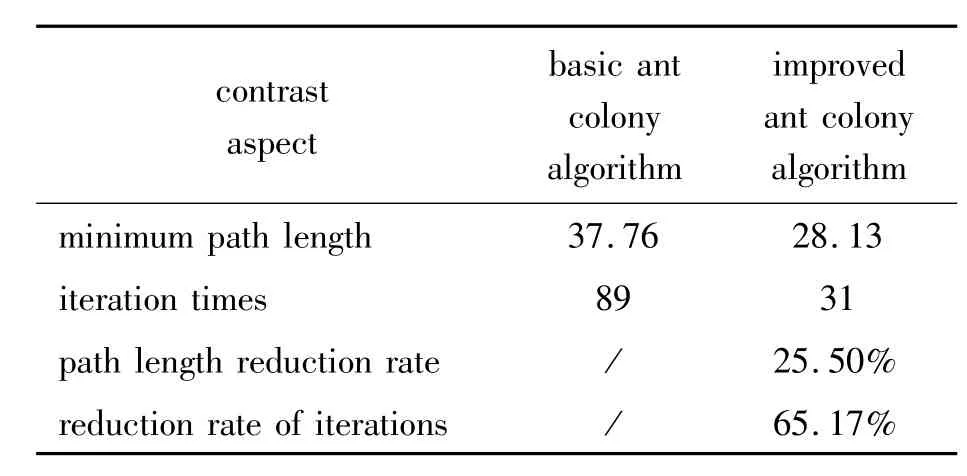
Tab Ie 2 Com parison of im p roved a Igorithm s
The temperature control process of reheating furnace is complex and affected bymany factors,which makes it difficult to establish itsmathematicalmodel.Therefore,in this paper,the first-order system pure lag objectwas taken as themathematicalmodel of the reheating furnace of hot continuous rolling.Its transfer function is as follows:

Where,the time constantTof the controlled object is 250,the pure lag time is 20 s,the static gainKis 120,and the step response was used as the input.The simulation results are shown in Fig.3.

Fig.3 Tem perature contro Icurve of heating furnace
From the simulation results,it could be seen that when the neural network optimized by the improved ant colony algorithm was used to control the temperature of the heating furnace,it only took 23 minutes for the system to reach the steady state.The traditional neural network was used to control the temperature of the heating furnace and took 35 minutes for the system to reach the steady state.The regulating time of the system was reduced by 34.29%,which showed that the proposed method could achieved the steady state in a shorter time and more effectively saved time in industry.
There was a lot of interference of external factors in the heating process of the heating furnace of the hot rollingmill,resulted in obvious fluctuation of the furnace temperature.To test the anti-interference ability of the proposed method,after the temperature control system of the heating furnace reached a stable state,an interference signalwas added at55min tomake its temperature fluctuate,and the resultwas shown in Fig.4.
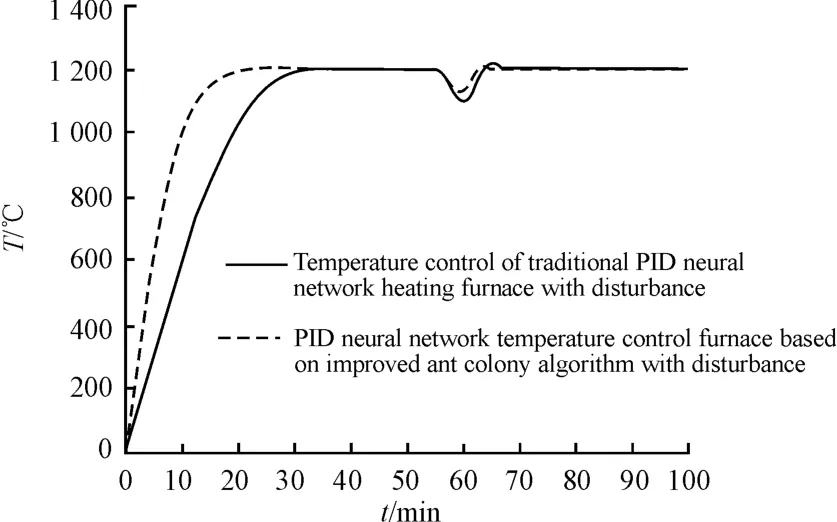
Fig.4 Tem perature contro I curve of heating furnace w ith disturbance
From the simulation results,it could be seen that the traditional PID neural network heating furnace temperature control system took 12.42 min from adding disturbance to restoring steady state,and the amplitude of the control system after adding disturbance was 138.46℃;the PID neural network heating furnace temperature control system with improved ant colony algorithm took 9.17 min from adding disturbance to restoring steady state,and the amplitude under the influence of disturbance signalwas112.82℃.The PID neural network heating furnace temperature control system based on the improved ant colony algorithm could reduced the time from adding disturbance to restoring steady state by 26.17%and the vibration amplitude by 18.52%,which showed that the system had strong anti-interference ability.
The test operation results of the improved system were shown in Table 3 and Table 4.Themainmeasurement and control parameters in the table were the furnace temperature of the heating furnace,and the real-time furnace temperature per minute was recorded.The recording period was 1-30 min and 55-70 min.
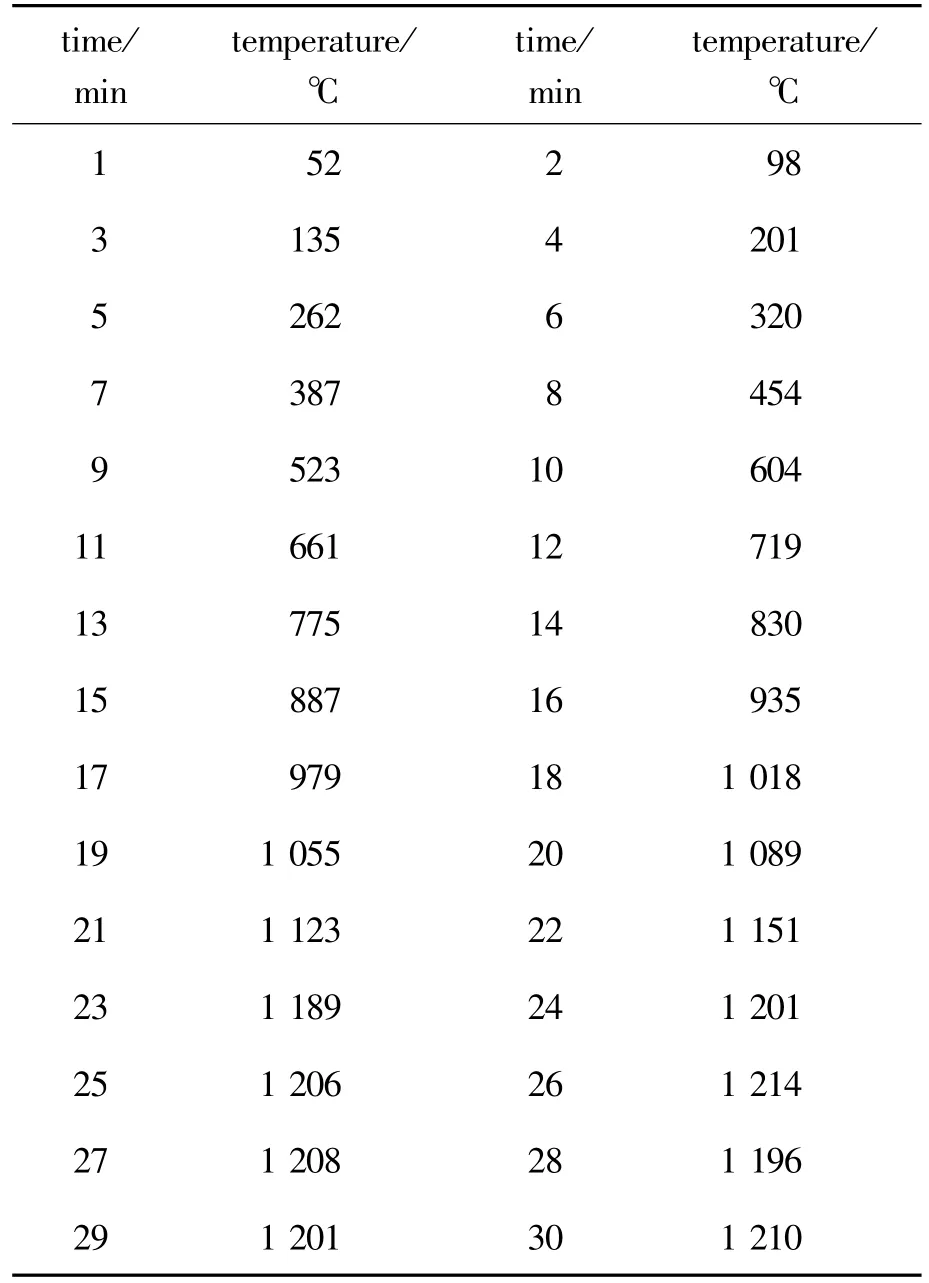
Tab Ie 3 1-30 m in tem perature at each tim e

Tab Ie 4 55-70 m in tem perature at each time
It could be seen from the experimental data that the improved system had good performance in regulating time and anti-interference ability,and the temperature was stable at(1 200±15)/℃,which not only had good control effect,but also could meet the needs of actual industrial production.
6 Conclusions
Based on the analysis of the technological process of the regenerative reheating furnace and the non-linear characteristics of the heating furnace system of hot rolling,the immune algorithm was introduced into the ant colony algorithm.The principle of affinity in the immune algorithm was used to increase the diversity of the ant colony.the initial information rules of the ant colony were improved.A PIDNN controller of the improved ant colony algorithm was constructed to heat the hot rolling.The simulation results show that the control method is superior to the traditional PIDNN controller in response speed and anti-interference ability,saved the time needed for industrial control,enhanced the stability of the heating furnace system,and provided an effectivemethod for the temperature control of the heating furnace.

- 机床与液压的其它文章
- Decoupling control of single DOF supporting system ofmagnetic-liquid double suspension bearing
- Influence of the thermal effect on the sealing performance of the hydraulic combined dynam ic seal
- Dynam ic GRNNmodel of hydraulic system fault detection based on the internet of things technology
- Form ing modeling and sensitivity analysis of sandwich composites
- Research of aerodynam ic characteristics of heavy commercial vehicles under crosswind for different urban road layout
- Design ofmulti-parameter ultrasonic measuring instrument for fluid