
基于模型的民用飞机自动刹车系统设计与研究
2020-12-22 01:56陈国慧张博强
民用飞机设计与研究 2020年3期
陈国慧 张 娟 张博强 陆 峰
(西安航空制动科技有限公司,西安 710075)
0 引言
民用飞机自动刹车系统是机轮刹车系统的一部分,能够减轻飞行员的工作负担,提升乘客的舒适性,提高飞机起飞和着陆阶段的安全性,国外民用飞机刹车控制系统均具备自动刹车功能[1-2]。本文将基于模型的系统工程应用在自动刹车系统开发中[3],从需求捕获到确定自动刹车系统的需求,建立需求对应的行为模型,将需求更加直观且无歧义的表达、传递、确认,根据自动刹车系统架构进行模型集成,确认其性能能够达到利益相关方的需要,并且能够在设计阶段应用模型确认、验证需求的合理性、可用性,在设计阶段发现错误,避免系统设计错误引起的反复[4]。
1 自动刹车系统原理
自动刹车系统是由飞行员控制自动刹车选择开关在需要实施制动前预先设定想要的减速率,飞机需要制动时,自动激活其制动功能使飞机停止。自动刹车系统提供飞机起飞阶段的终止起飞功能(rejected takeoff,简称RTO)以及着陆阶段的自动刹车功能。在起飞阶段,如果飞行员选择终止起飞,RTO将输出最大刹车压力或者固定减速率使飞机制动。在着陆阶段,自动刹车提供高、中、低三个档位的减速率制动飞机[5]。自动刹车系统在工作时,实时检测其相关产品的性能。自动刹车的功能分解如图1 所示。
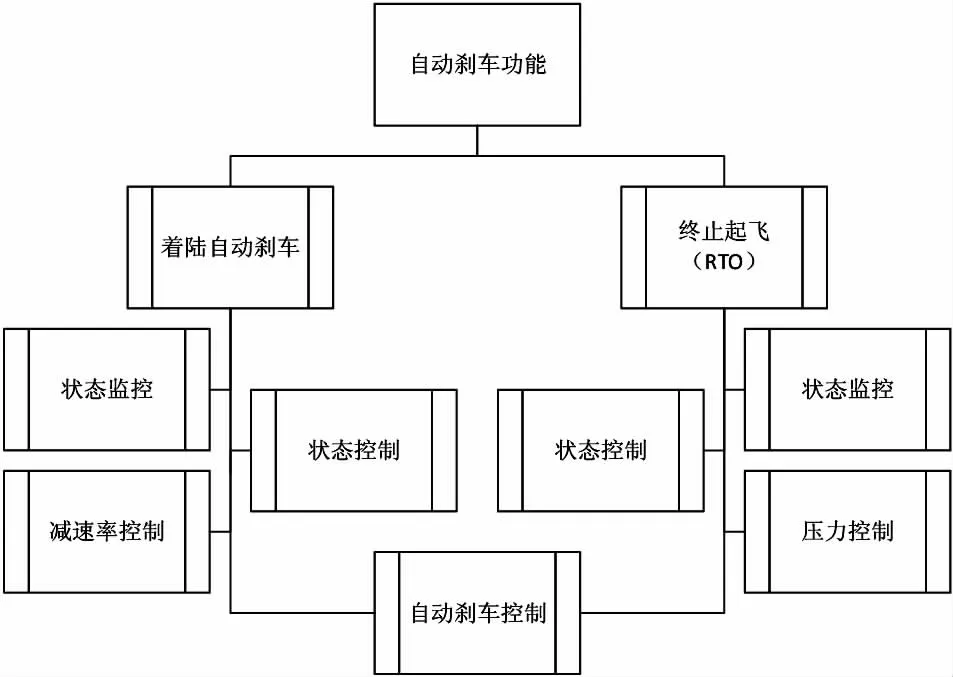
图1 自动刹车功能分解图
2 基于模型的自动刹车设计
2.1 基于自动刹车系统需求的行为模型
本文采用基于模型的自动刹车系统设计,在系统开发阶段首先对需求进行定义,根据用自然语言描述的需求建立基于Library的行为模型,用行为模型确认单个需求的正确性,集成模型完善需求,在确认过程中将模型与需求反复迭代,最终形成可发布的需求及模型。将所有需求的行为模型均在Library中建立,并与需求建立连接,实现需求与模型的一一对应,形成可追溯的链条,如图2 所示。
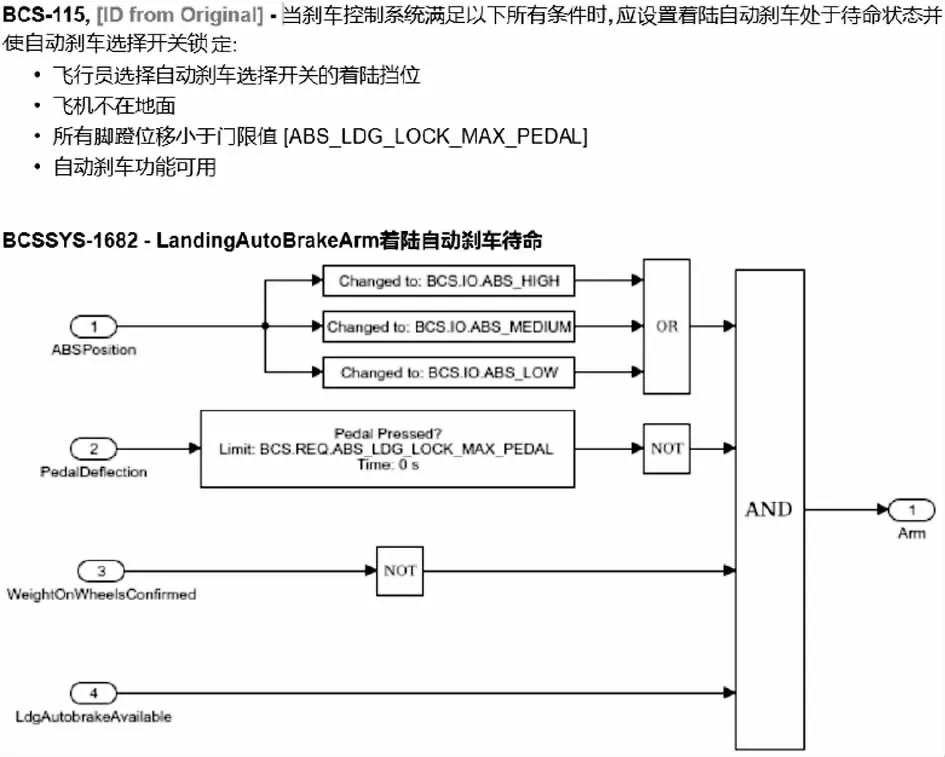
图2 基于需求的行为模型
2.2 自动刹车系统行为模型库
自动刹车功能提供的两种刹车模式均包含:可用、待命、解除待命、激活、快速解除激活以及柔和解除自动刹车这六个状态。可用状态:主要是通过判断刹车系统、减速率、油门杆位置等信号判断自动刹车是否可用,如果可用则可进入下一状态,否则自动刹车系统将按照故障处理。待命状态:通过轮载信号判断自动刹车是否可用,脚蹬位置等信号判断飞机是否进入自动刹车待命状态,如进入待命状态则自动刹车开关将锁定在对应档位,如飞机未进入自动刹车待命状态则自动刹车选择开关将回复到OFF档位。解除待命:通过判断脚蹬位置是否超控等信号判断是否解除待命状态。激活:在自动刹车系统处于待命状态后,通过轮载信号、油门杆位置、机轮速度等信号判断是否激活自动刹车。解除激活:解除激活分为快速解除和柔和解除,当自动刹车系统故障时则快速解除,通过脚蹬位置、飞机速度判断飞机是否退出自动刹车。其中柔和解除需要将自动刹车输出的压力调整到脚蹬输出的压力,其公式如下所示:
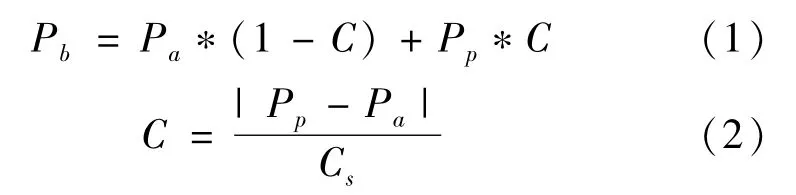
其中Pb为实时刹车压力,Pa为自动刹车输出压力,Pp为脚蹬刹车压力,Cs为常数,是压力上升的斜率。
基于上述的逻辑建立基于Library的自动刹车系统的行为模型库,模型库中包含自动刹车系统的所有需求,并实现了一一对应的关系,如图3 所示。
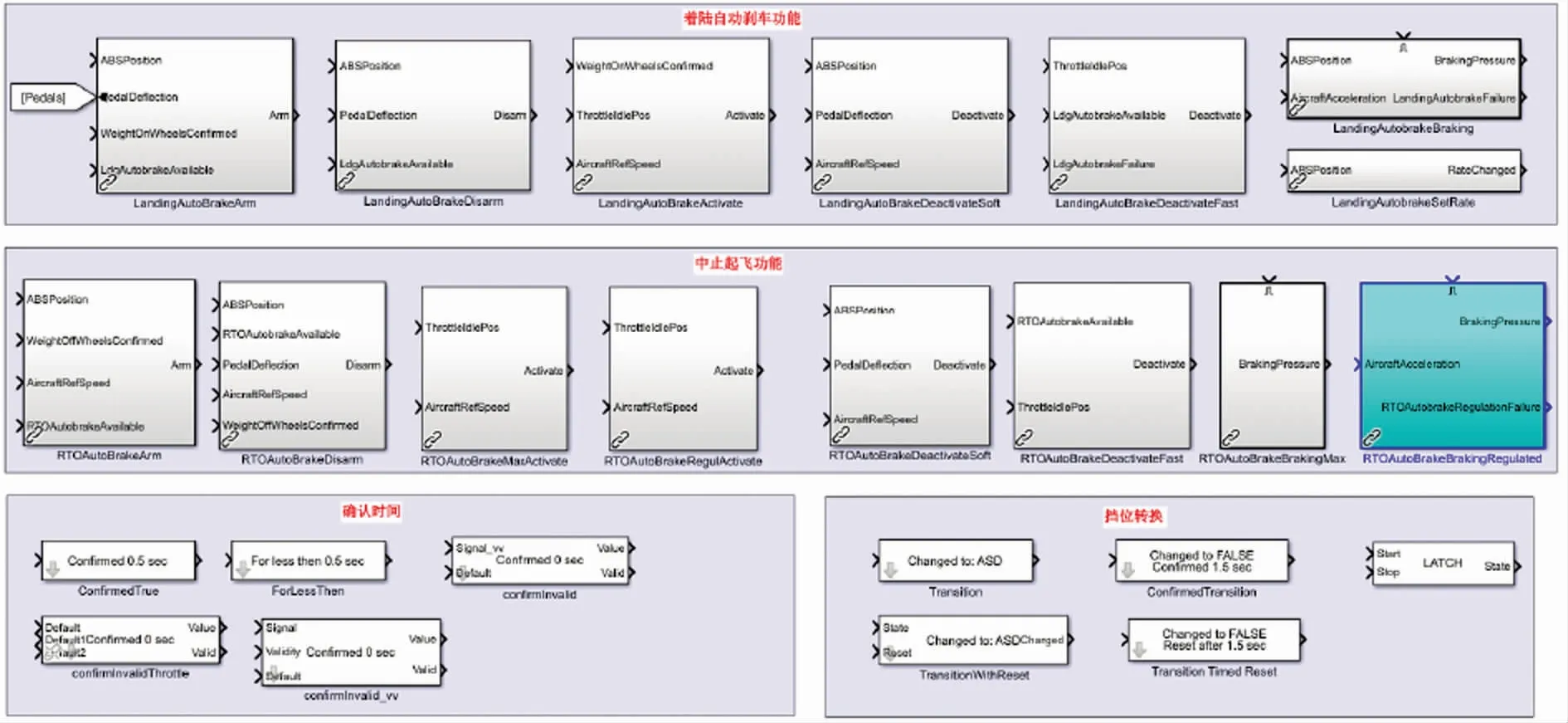
图3 自动刹车系统行为模型库
2.3 基于Stateflow平台的状态转换模型
根据需求建立自动刹车系统的行为模型库后,考虑该系统存在多个状态,且状态之间需要互相转换,本文采用有限状态机的图形实现工具Sateflow解决这一问题,形成着陆阶段自动刹车以及RTO的状态转换模型[6-8],其形式如图4 所示。
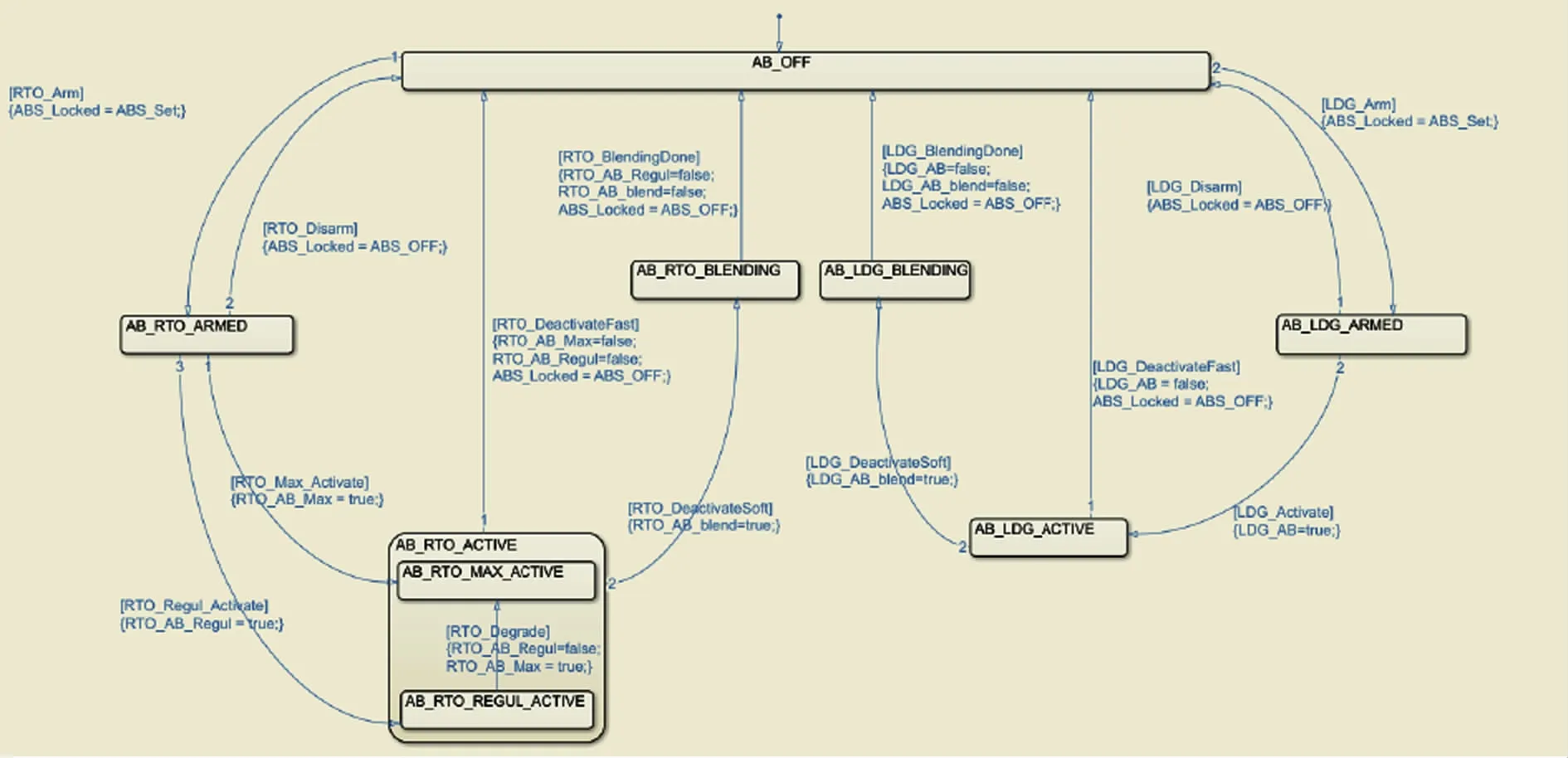
图4 基于Stateflow的状态转换
3 基于模型的自动刹车系统集成测试
3.1 基于架构的自动刹车系统集成模型
自动刹车功能主要是由各状态、状态转换以及在自动刹车控制律实现的。对自动刹车系统需求以及行为模型定义后,需确定自动刹车系统的功能架构,本文确定了着陆阶段自动刹车以及RTO的架构,如图5 所示,图中分别对各状态的定义、触发条件、功能以及下一步工作进行了说明。
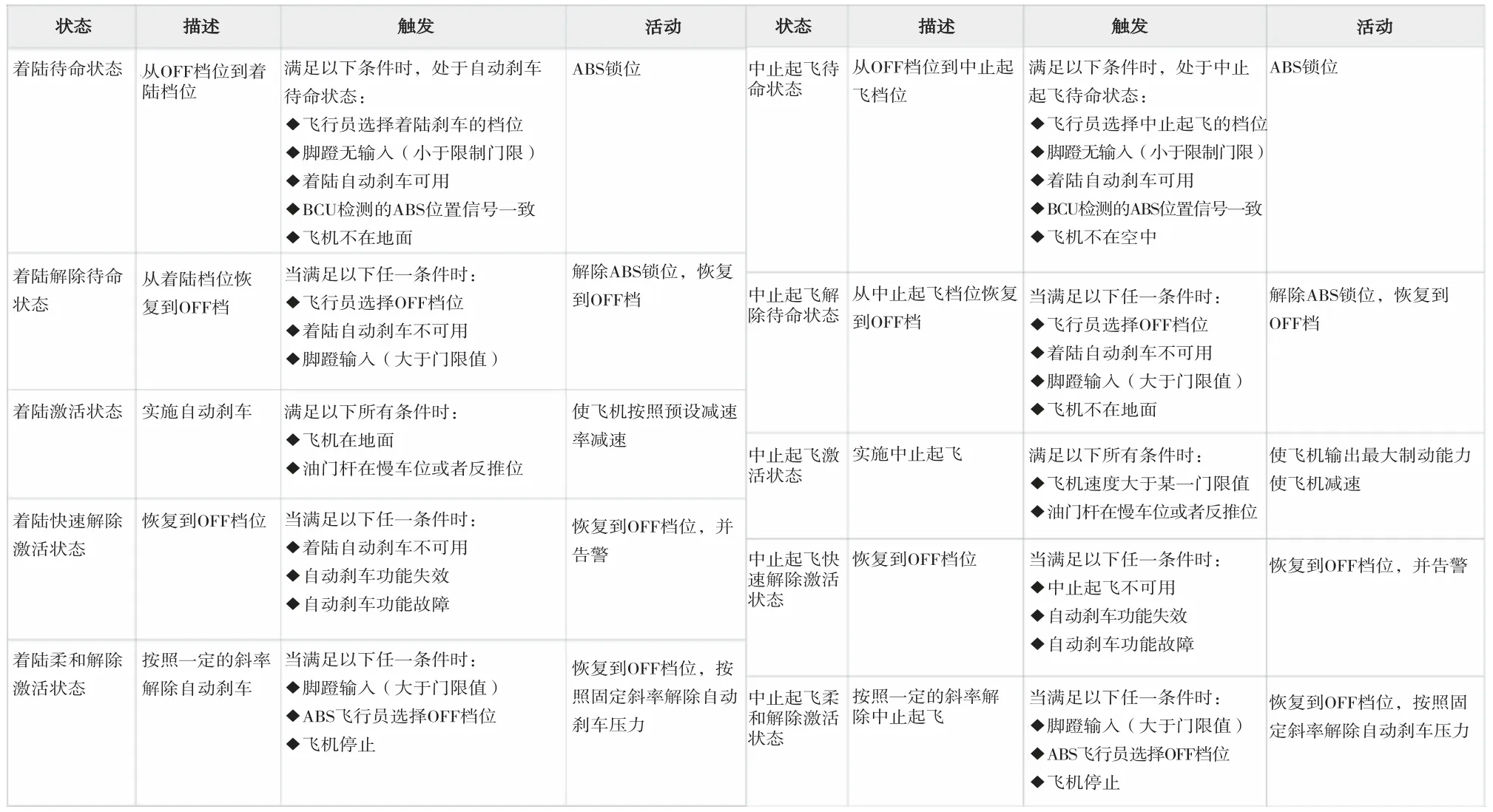
图5 自动刹车架构
根据着陆自动刹车以及RTO的架构对自动刹车系统的行为模型进行集成,集成自动刹车功能模型。该集成模型是在Simulink 中进行,将Library中的行为模型以及Stateflow的状态模型嵌在Simulink中运行,Stateflow是由Library中的事件进行驱动。在这一过程中,可对各需求的接口,完整性以及架构的合理性进行确认,完善需求及架构。自动刹车功能的集成模型如图6 所示。其中AutoBrakeLogic模块为自动刹车系统各状态判断、转换的集成模型,LandingAutobrakeBraking以及RTOAutoBrakeBraking为自动刹车的控制律,其输出为飞行员选定的减速率对应的刹车压力。其中自动刹车控制律采用固定减速率控制,飞行员选择预定减速率的挡位,实时接收飞机的减速率,经过PID控制算法进行计算,得到其刹车电流,而输出的刹车电流经过限幅设置输出最终的自动刹车控制电流,其中限幅设置主要是根据不同挡位设置不同的刹车电流上限,以此解决当前跑道能够提供的最大结合力与选择挡位不匹配的问题,减少其频繁打滑的情况。自动刹车输出刹车电流后,将其刹车电流与脚蹬生成的刹车电流以及基于滑移率控制的刹车电流对比输出最小的刹车电流,以防止轮胎爆破或者机轮锁死的情况。Blending模块则为公式(1)表达的模型,即压力调整模块。
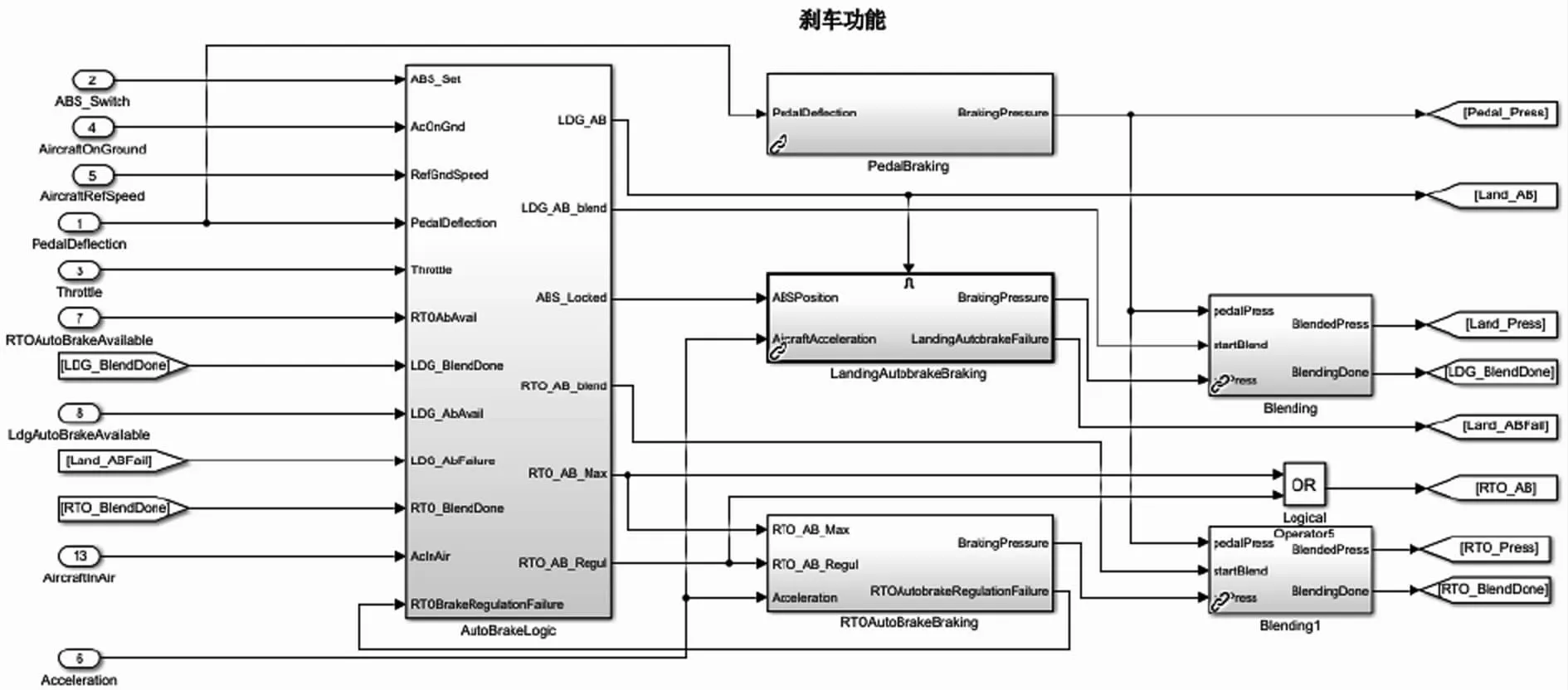
图6 基于Simulink 的自动刹车功能集成
3.2 基于模型的测试用例
完成自动刹车系统的需求定义、架构设计、模型集成后,综合考虑自动刹车系统的应用场景,包括着陆阶段的高、中、低档位,RTO的最大刹车压力或固定减速率,以及系统的各需求,利用Variant Model建立自动刹车系统的测试用例,如图7 所示。测试用例分别为着陆阶段自动刹车、着陆阶段自动刹车超控、RTO以及RTO超控四种场景,在这四个测试用例中分别定义了自动刹车功能模型的输入,应用.m文件定义测试用例执行的先后顺序,分别执行这4 个测试用例,对自动刹车功能模型进行测试。且对输入的参数值进行自动化的设置对不同工况的被测模型进行测试[9]。完成自动刹车功能模块的自动化测试。
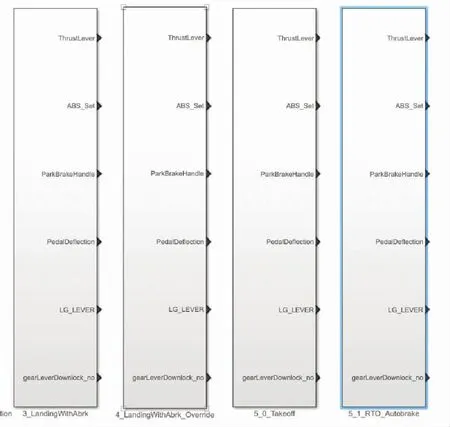
图7 自动刹车系统测试用例
4 自动刹车系统仿真验证
自动刹车功能集成后,应建立自动刹车系统的闭环控制模型,包括自动刹车系统的测试用例、飞机模型、控制阀模型、机轮模型、跑道模型,对各模块进行集成,建立自动刹车系统的集成仿真模型。对其性能进行仿真分析,调试自动刹车系统的控制律,使其能够在不同跑道条件下自动调试,从而使飞机在整个刹车过程中能够维持在预设的减速率。自动刹车系统仿真模型能够在设计前期确认其逻辑以及性能的正确性,发现潜在的问题,能够缩短设计时间,规避设计—生产反复迭代问题,有效提高设计效率[10]。
本文以着陆阶段自动刹车系统的3.0 m/s2的固定减速率,干跑道条件为例进行仿真,其仿真结果如图8 所示。从仿真结果可以看出,自动刹车系统使飞机减速率维持在3.0 m/s2附近反复调整。
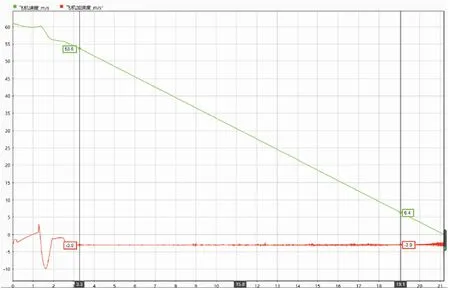
图8 自动刹车系统仿真结果
5 结论
本文所应用的方法已经在民用飞机自动刹车系统研制项目中进行了实际应用。实践表明,基于模型的自动刹车系统设计可以快速、有效的对系统需求、架构设计进行确认,具有唯一性、复用性等特点。建模工具以及需求与模型管理工具的应用,可有效减轻研发人员的重复工作,更直观的显示了需求,辅助设计团队对系统需求进行验证,对设计思路不断完善,提高工作效率。此外,基于需求的行为模型能够避免需求的模糊描述,保证设计语言一致性,避免自然语言带来的理解歧义,而且系统数字化模型可以支撑系统级仿真分析,精确评估系统设计方案的合理性。
猜你喜欢
舰船电子工程(2021年2期)2021-03-16
汽车工程(2021年12期)2021-03-08
智能计算机与应用(2020年10期)2020-03-18
当代陕西(2019年16期)2019-09-25
科普童话·百科探秘(2015年6期)2015-10-13
商业会计(2015年15期)2015-09-21
伴侣(2015年5期)2015-09-10
大众科学(2015年10期)2015-09-10
中国总会计师(2015年5期)2015-06-16
中国自行车·骑行风尚(2014年2期)2014-05-07
