
基于Isight与AVL Cruise耦合的电动汽车减速器速比优化
2020-12-15 07:00尹发洪
汽车实用技术 2020年22期
关键词:减速器
尹发洪

摘 要:减速器是电动汽车上的重要部件,在保证汽车具有足够动力性能的同时,通过对减速器速比进行调整,让电机尽量工作在更高效地转速和扭矩区间能提高整车经济性能。文章主要介绍采用Isight实现对汽车减速器速比进行分析和优化,为今后传动系统的开发与应用提供较好的指导作用。
关键词:减速器;速比优化;AVL Cruise;性能目标;Isight
中图分类号:U463.33+5.1 文献标识码:A 文章编号:1671-7988(2020)22-07-03
Abstract: The reducer is an important component of electric vehicles. While ensuring that the vehicle has sufficient power performance, by adjusting the speed ratio of the reducer, the motor can work in a more efficient speed and torque range to improve the economic performance of the vehicle. The article mainly introduces the use of Isight to realize the analysis and optimization of the speed ratio of the automobile reducer, which will provide a better guidance for the development and application of the transmission system in the future.
Keywords: Reducer; Speed ratio optimizing; AVL cruise; Performance objective; Isight
CLC NO.: U463.33+5.1 Document Code: A Article ID: 1671-7988(2020)22-07-03
引言
减速器是电动汽车的重要传动零部件,设计减速器时要用到资料有:汽车的种类及用途,电机的参数(功率/转速和扭矩/转速),最大车速,最大爬坡度,最大牵引力。为保证汽车必要的动力性和经济性指标,必须合理选择减速器速比[1]。
本文基于电动汽车的动力经济性的性能要求,通过减速器速比基本计算对减速器速比进行初级选型,再通过AVL Cruise建立模型进行动力经济性仿真,通过Isight与AVL Cruise耦合以及Isight的优化算法选择最优的减速器速比以确保电动汽车的动力经济性满足性能目标。
1 减速器速比的计算分析
不同的汽车,需要不同的减速器速比,其原因在于他们的使用条件不同,对整车性能要求不同,汽车本身的功率不同。而传动系统的速比与汽车的动力经济性有着密切的联系。
1.1 动力性能要求
就动力性而言,减速器速比越大,加速性能及爬坡性能越好,但最高车速越低,為了满足整车厂制定的加速性能、爬坡性能及最高车速目标,需对减速器速比进行计算分析。
1.1.1 最大通过性能
即汽车通过要求的最大坡道角度αmax坡道时,驱动力应大大于或等于此时的滚动阻力和上坡阻力(加速阻力为零,空气阻力忽略不计)。用公式表达如下:
1.1.2 最高车速性能
即在无风条件下,水平良好的沥青路或水泥路面上汽车所能大到的最大行驶速度。首先最高车速越高要求的减速器速比越低,其次要求的电机功率越大,电动汽车的最高车速也是整车动力性能的一个重要指标。
(1)速比要求
1.2 经济性能要求
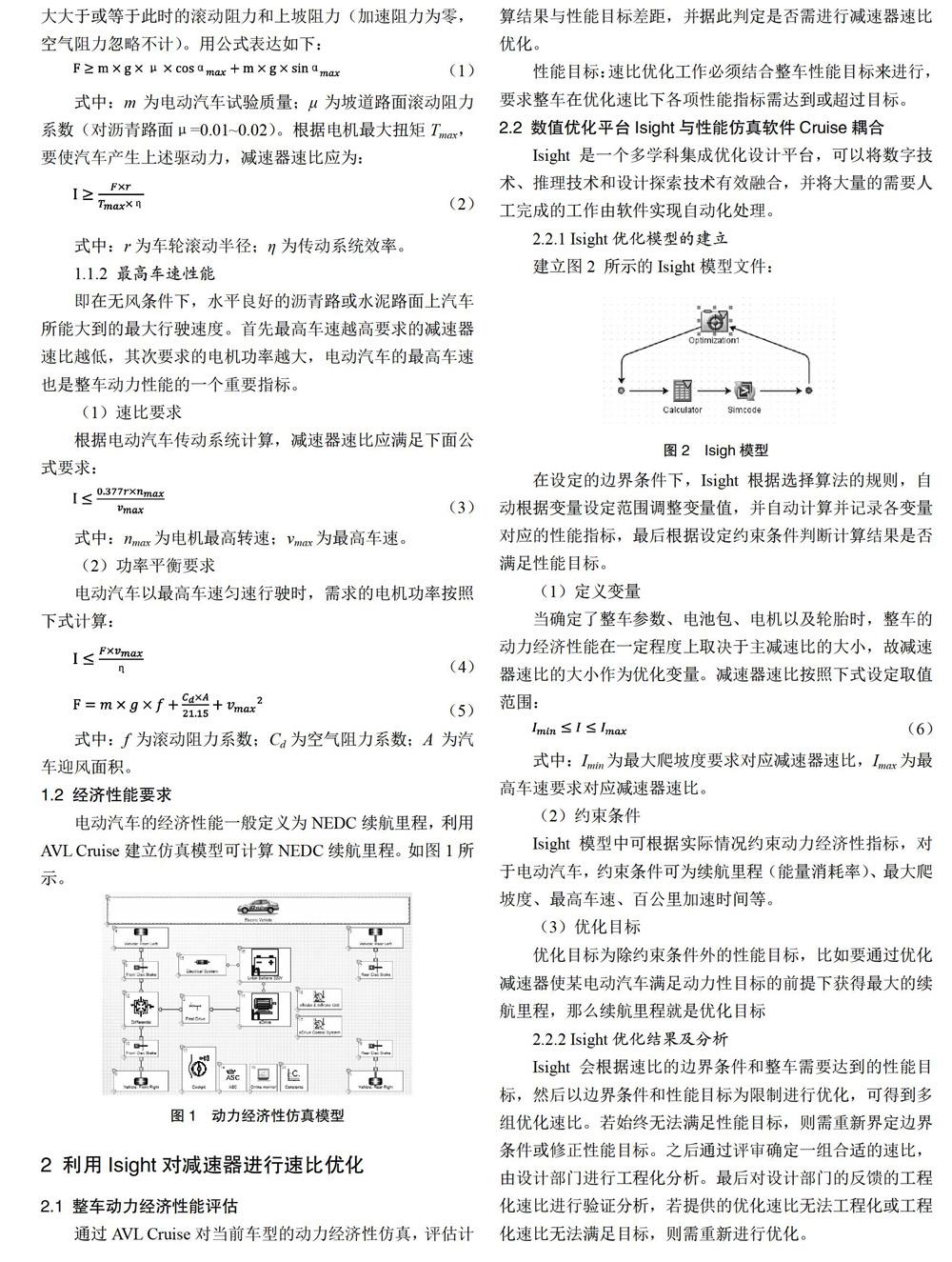
电动汽车的经济性能一般定义为NEDC续航里程,利用AVL Cruise建立仿真模型可计算NEDC续航里程。如图1所示。
2 利用Isight对减速器进行速比优化
2.1 整车动力经济性能评估
通过AVL Cruise对当前车型的动力经济性仿真,评估计算结果与性能目标差距,并据此判定是否需进行减速器速比优化。
性能目标:速比优化工作必须结合整车性能目标来进行,要求整车在优化速比下各项性能指标需达到或超过目标。
2.2 数值优化平台Isight与性能仿真软件Cruise耦合
Isight是一个多学科集成优化设计平台,可以将数字技术、推理技术和设计探索技术有效融合,并将大量的需要人工完成的工作由软件实现自动化处理。
2.2.1 Isight优化模型的建立
建立图2 所示的Isight模型文件:
在设定的边界条件下,Isight根据选择算法的规则,自动根据变量设定范围调整变量值,并自动计算并记录各变量对应的性能指标,最后根据设定约束条件判断计算结果是否满足性能目标。
2.2.2 Isight优化结果及分析
Isight会根据速比的边界条件和整车需要达到的性能目标,然后以边界条件和性能目标为限制进行优化,可得到多组优化速比。若始终无法满足性能目标,则需重新界定边界条件或修正性能目标。之后通过评审确定一组合适的速比,由设计部门进行工程化分析。最后对设计部门的反馈的工程化速比进行验证分析,若提供的优化速比无法工程化或工程化速比无法满足目标,则需重新进行优化。
3 某电动汽车减速器速比优化分析
3.1 性能目标确认
3.1.1 整车基本参数如表1所示
3.1.2 性能目标
(1)续航里程:≥505km
(2)最大爬坡度:≥30%
(3)最高车速:≥150km/h
(4)百公里加速时间:≤8.5s
3.1.3 AVL Cruise仿真结果如表2所示
根据计算结果,NEDC续航里程(百公里电耗)无法满足性能目标,需对进行减速器速比优化。根据最大通过能力及最高车速性能的计算方法得出减速器的约束范围为7.2-10。
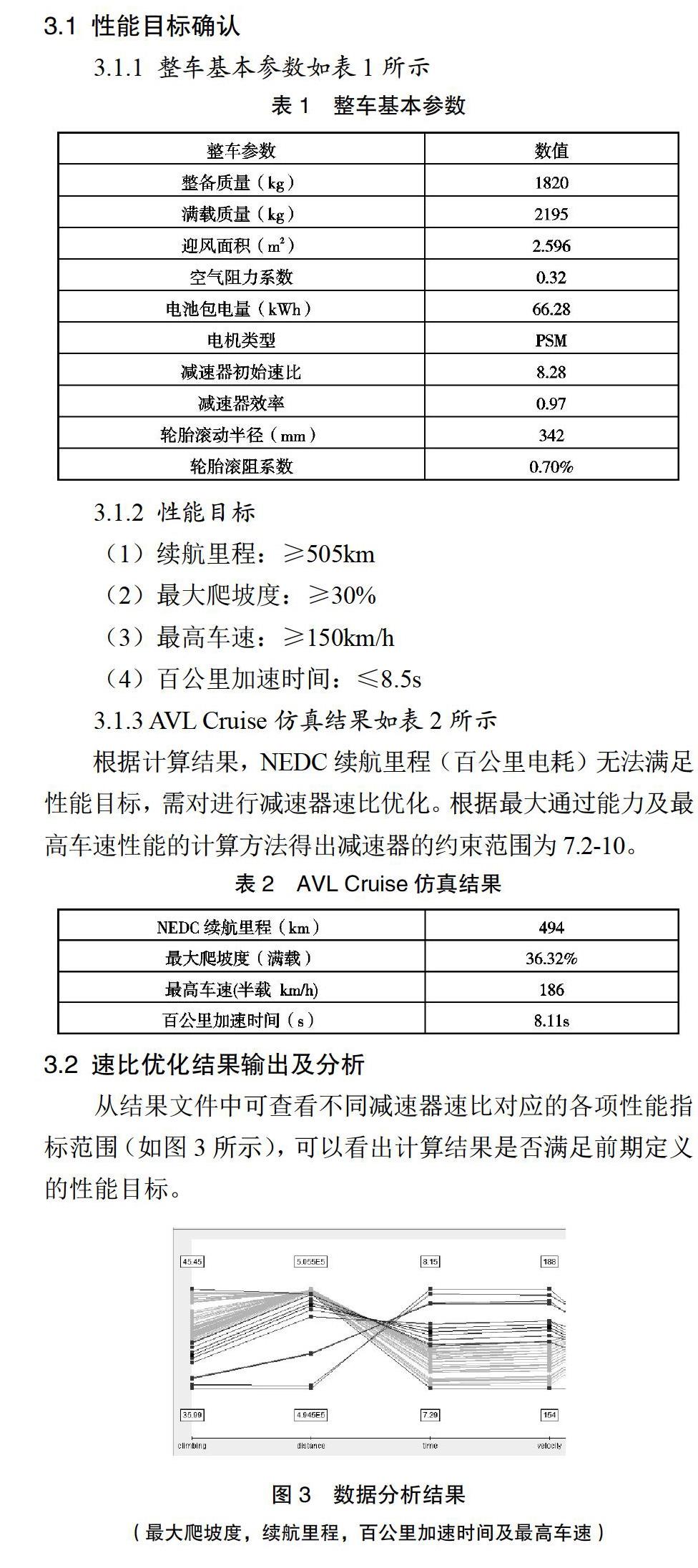
3.2 速比优化结果输出及分析
从结果文件中可查看不同减速器速比对应的各项性能指标范围(如图3所示),可以看出计算结果是否满足前期定义的性能目标。
导出结果文件,根据续航里程(百公里电耗)、最大爬坡度、最高车速以及百公里加速时间的要求筛选满足整车性能目标的结果,选择最优的一组变量和性能结果,如表3所示:
由上表可看出,利用Isight优化后NEDC续航里程提高了2.23%,并且提高了最大爬坡度11.45%,降低了百公里加速时间5.67%,由于减速器速比增加,汽车最高车速降低了8.6%,但符合初期定义的性能目标。
4 结束语
通过上述方法对电动汽车减速器速比进行优化分析的结果可看出减速器的速比对电动汽车的动力经济性有一定的影响。一般来讲,对于动力性,减速器速比越大,电动汽车的最大爬坡度越大、百公里加速时间越短、最高车速越低,可理解为动力性越好。减速器速比越小动力性越差。对于经济性,汽车在同样速度下运行的时候对于不同的减速器速比对于电机的需求扭矩和转速都不一样,电机的效率也就不同,所以会造成续航里程(百公里电耗)有差异。
对于同一辆汽车能满足其动力性需求的减速器速比范围很大,如果用人工的方式筛选出经濟性能最好的减速器速比工作量巨大,Isight能优化算法,并能处理大量的运算。经过上述方法及示例表明使用Isight与AVL Cruise耦合的方法能有效的优化减速器速比,对电动汽车传动系统的研究开发有很重要的指导意义。
参考文献
[1] 刘惟信.汽车设计[M].北京:清华大学出版社,2001.
[2] 张洪欣.汽车设计[M].北京:机械工业出版社,1999.
[3] 余志生.汽车理论[M].北京:机械工业出版社,2000.
[4] 陈家瑞.汽车构造(上m下册)[M].北京:人民交通出版社,1994.
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
科学与生活(2021年16期)2021-11-25
科技风(2019年6期)2019-10-21
农家科技下旬刊(2019年3期)2019-07-08
环球市场信息导报(2017年22期)2018-01-23
教育教学论坛(2017年43期)2017-11-08
中国科技纵横(2017年16期)2017-09-13
现代商贸工业(2016年11期)2016-12-26
课程教育研究·中(2016年4期)2016-06-16
