
基于BIM和三维激光扫描技术的建设工程质量检测方法研究
2020-12-15 08:12赵馨怡
土木建筑工程信息技术 2020年5期
赵馨怡 郭 晓
(中冶建筑研究总院有限公司,北京 100088)
引言
近年来,我国建筑行业发展迅猛,随之而来的建筑工程质量问题却层出不穷。BIM技术作为一种成熟的信息化技术手段,可以通过施工深化设计,结合虚拟仿真技术,对施工阶段的工程质量问题提供强有力的管控。然而,BIM技术在实际应用过程中,往往只能提供设计模型或者经过深化设计后的模型,其主要目的是反映设计意图,指导施工过程,实际的建造效果和工程质量,则主要依靠现场人员进行实测实量,实地检查后得到。整个检查过程主要依靠人力,效率低下,且难以反映整体的工程施工情况。
因此,采用三维激光扫描技术反映整体的施工效果,并且通过将BIM模型和三维点云模型进行自动对比,从而得到建筑构件及整体的施工偏差,则不失为一种新型的智能化施工质量检测方法。
1 三维激光扫描技术特点
三维激光扫描技术[1],是一种非接触主动式快速获取物体表面三维密集点云的技术[2],它主要利用向被测对象发射激光束并接收返回信号来获取被测物体表面的空间信息[3]。与其他传统的测量手段相比,三维激光扫描技术具有非接触、高精度、高分辨率、数据获取速度快、数字化程度高等优势[4],可以在现场环境恶劣、人力无法到达的情况下,获取大量的被测目标数据,在实际应用中能够弥补传统测量方法的诸多不足。
在建设工程质量检测中应用三维激光扫描技术时,可以利用三维激光扫描仪扫描在建工程[5],快速得到能够反映其外观的海量点云数据; 进一步,通过对点云数据的去噪、抽取、配准、拼接等处理,得到三维点云模型。相较于反映设计意图的BIM模型,三维点云模型可以清晰而完整地反映建筑物的实际建造情况。
2 BIM模型与三维点云模型对比技术
2.1 整体技术路线
首先,建立BIM模型并且通过外业工作得到施工现场的工程三维点云数据; 之后,在自主研发的三维点云数据处理软件中对点云数据进行预处理,得到三维点云模型; 进一步,将点云模型导入Autodesk Revit软件,设计数据对比算法,进行点云模型和BIM模型的对比,得到对比报告; 最终,通过WebGL技术,将对比结果直观显示出来,为建筑工程的质量检测结论提供依据。
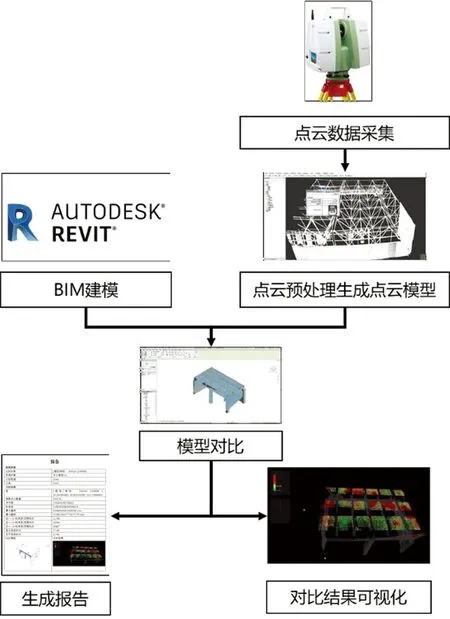
图1 整体技术路线
2.2 点云数据预处理
通过外业工作得到的点云数据,数据量巨大,其中包含大量数据分析时不需要的无效点云数据,因此需要对其进行相应的预处理操作,去除点云数据偏差,才能够保证最终得到的点云模型中数据的可靠性。非接触式点云扫描仪,由于受到镜头畸变、图像处理算法、测量环境光线的影响,采集到的数据往往含有较多的噪声点[6],这里采用自主研发的三维点云数据处理软件进行点云粗差剔除以及噪声抑制,过滤掉数据中的噪声点[7]。
在实际测量中,经常由于遮挡、扫描特性、扫描仪误差等原因导致被测建筑物点云中缺失一定的点云数据,因此采用点云补洞功能对其进行一些的修补。
由于最终要将整体的点云模型与BIM模型进行对比,因此需要对点云数据进行配准。在实际外业测量中,一般情况下会从不同测站获取同一个被测建筑物的分块点云数据,笔者通过在三维点云数据处理软件中选取分块点云间的重合数据,进行点云数据的粗配准和精配准,最终得到符合质量要求的点云数据模型。
除了采用自主研发的三维点云数据处理软件,进行点云数据的预处理外,目前,市面上常用的三维激光扫描仪,例如FARO、Trimble等,都配套了相应的点云处理软件。主要包括点云数据的去噪、平滑、编辑、分类、着色、重构、配准、拼接等数据预处理功能[8]。
2.3 BIM模型与点云模型对比方法
在得到BIM模型和经过预处理的点云模型后,对两者进行对比。
首先对两者的坐标系进行匹配,便于之后的对比工作。笔者使用Revit软件对两者的坐标系进行匹配。Revit会将点云的世界原点,即(0,0,0)点,放置在Revit项目原点,之后在场地平面中可将该Revit项目原点视为项目基点,同时可以将点云的北向(0,1,0)与Revit中的“项目北”重合,保持坐标系的方向一致。
如果点云模型相对于点云世界原点的位置,与BIM模型相对于项目原点的位置不同,则需要通过设置插入点坐标来匹配两个模型。
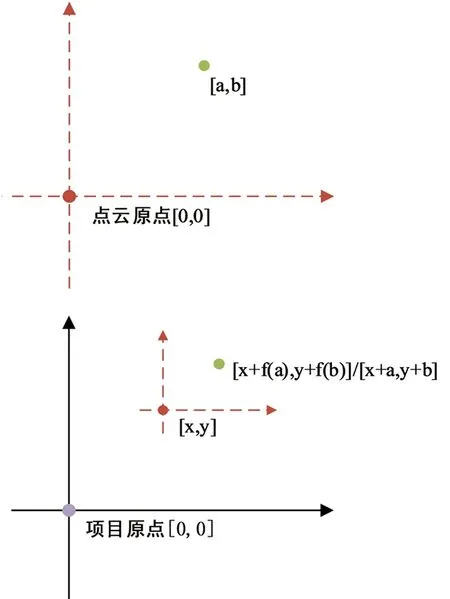
图2 设置插入点坐标
在将两个模型的位置和方向都调整一致之后,对模型进行对比。在测量外业中进行激光扫描时,激光是拥有发射点和发射方向的,在实际的点云模型中,也包含相应的发射点与发射方向。因此,在进行对比的过程中,采取遍历点云中的每一个点的方法,获取点云发射原点到该点的方向,得出激光发射方向。进一步,在该方向上进行一次正向投射,再进行一次逆向投射,分别尝试找到能够投射到的平面,并计算相应的距离,最终取最短距离作为该点的偏移量。
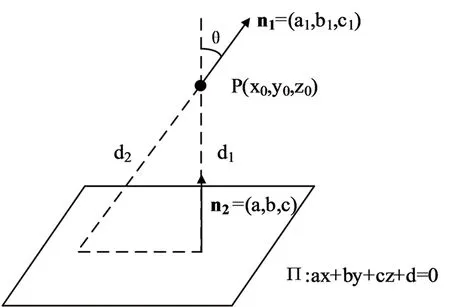
图3 点到平面距离计算示意图
根据图示,可计算出点到平面最短距离:
进一步计算d2:
除此以外,根据计算结果,还可以统计出最大偏移、最小偏移、偏差的平均值、偏差的标准值。如果设置容许误差,还可以根据设定误差,计算得到超出容差的点。
2.4 对比结果可视化方法
目前,可用于三维模型展示的工具和方法很多,本研究基于Three.js这一引擎,在浏览器中实现了对比结果的可视化。Three.js是一款基于原生WebGL封装运行的三维引擎,它能够支持在浏览器中显示三维模型,实现海量数据的可视化,设置几何体的材质、光源、相机等。
在本次研究中,笔者通过改变偏差值不同的点的颜色来显示偏差的大小,随着偏差值从小到大,点的颜色从绿色向黄色、红色过渡。同时,笔者还添加了“鼠标操作三维场景旋转缩放”、“相机位置调节”等功能,方便使用者对模型对比结果进行查看。最终,生成的模型对比可视化效果如图4所示。
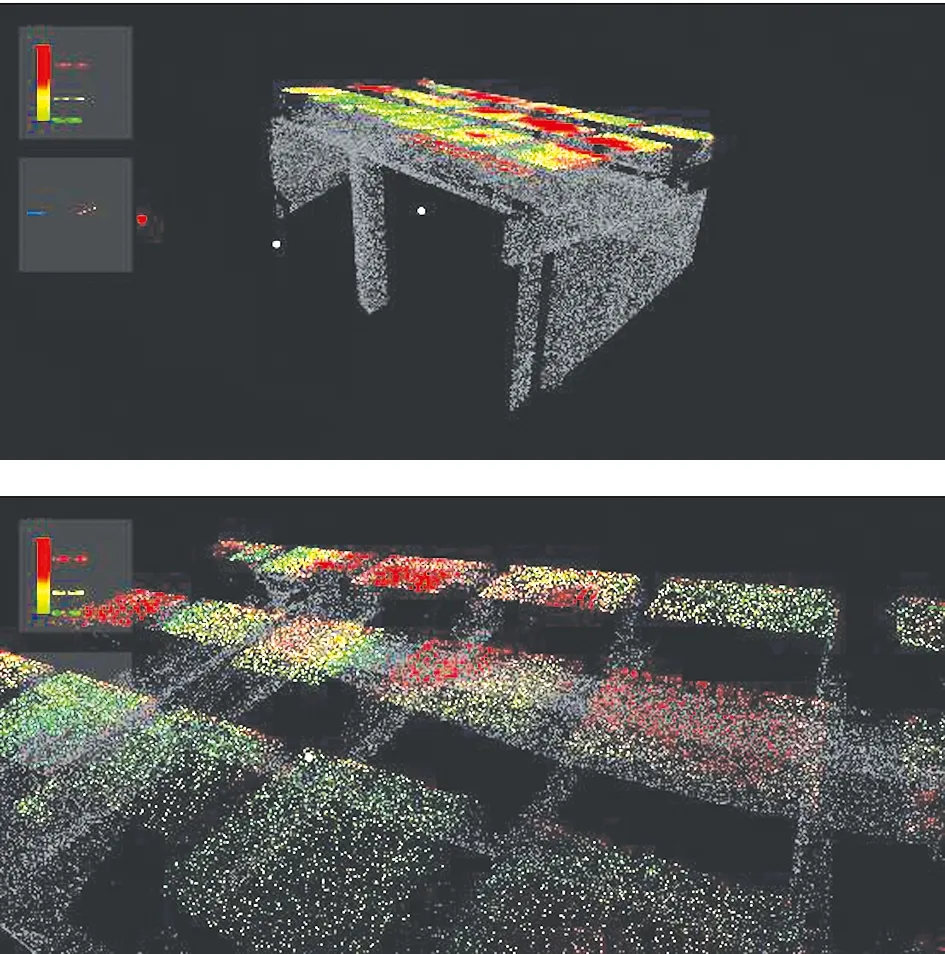
图4 点云与BIM模型对比结果可视化
同时,笔者还生成了相应的分析报告供使用者查看,方便使用者对比较的结果有量化的感知。生成分析报告结果如图5所示。
3 结语
针对建筑工程施工与工程设计之间的差异,本文提出了通过三维激光扫描来进行建筑工程质量检测的思路,并给出了一整套数据处理和模型对比的方法。通过将扫描得出的现场施工三维点云模型与设计用BIM模型进行对比,得到实际施工的误差,从而为后续的工程建设和深化设计提出指导。经过实践,该方法具备可操作性,对比结果可靠,能够直观地向使用者反映现阶段施工质量。
相较于传统的三维激光扫描仪,如FARO、Trimble等自带的点云数据处理软件,本文研发软件的创新点在于:拓展了传统点云数据处理软件的功能,不只拘泥于点云数据的简单后处理功能,更包括了点云数据与BIM模型的对比功能,能够为施工过程提供更为实际的指导作用。
在后续的研究中,笔者将进一步提升软件的易用性,并对海量点云数据的存储和计算进行更加深入的研究。
猜你喜欢
材料与冶金学报(2022年2期)2022-08-10
温州大学学报(自然科学版)(2022年2期)2022-05-30
心理学报(2022年4期)2022-04-12
能源工程(2021年6期)2022-01-06
建材发展导向(2021年12期)2021-07-22
建材发展导向(2021年23期)2021-03-08
语数外学习·初中版(2020年2期)2020-09-10
中学生数理化(高中版.高一使用)(2020年2期)2020-04-21
智富时代(2019年4期)2019-06-01
智富时代(2019年4期)2019-06-01
