
向家坝升船机单套驱动装置严重故障工况下应急运行技术研究
2020-12-08 02:07刘恒刘羽
中国水运 2020年10期
刘恒 刘羽
摘 要:向家坝升船机提升系统利用四套电气驱动装置,采用同步轴刚性连接的方式驱动承船厢上下运行。升船机在执行船厢上下运行过程中,若发生单套驱动装置损坏情况,将触发升船机系统执行紧急故障停机。驱动系统故障若经检查发现为驱动电机故障或者电气传动装置相关故障,检修恢复周期长,导致船舶滞留承船厢内无法进出,造成不良社会影响。为彻底解决因单套驱动装置故障造成的船舶滞留情况,特研究在三套电气驱动装置运行工况下的紧急运行方案,彻底解决该类故障引起的船只滞留承船厢的故障。
关键词:升船机;驱动系统;单套驱动故障
中图分类号:U642 文献标识码:A 文章编号:1006—7973(2020)10-0141-02
向家坝升船机作为金沙江航道重要的航运设施,其安全运行要求尤其重要。由于向家坝升船机采用全平衡齿轮爬升螺母柱保安式结构,若发生单套驱动系统故障,将引起升船机紧急停机。为避免过机船舶滞留升船机承船厢内,特对该类故障进行深度技术分析,并提出具有可行性的技术方案。
1 向家坝升船机驱动系统分析
1.1 向家坝升船机驱动系统现状
目前,向家坝升船机驱动系统为升船机的提升驱动的动力系统,在传动控制站控制下,四套“变频传动装置+电机”分别驱动四个小齿轮,通过爬升齿条提升承船厢。电气传动系统为四电机(机械轴同步)出力均衡交流变频调速系统,传动控制站将根据接收到的诸如上行、下行命令以及上/下行目标位、运行速度、船厢水位、给定上升/下降时间、承船厢的实际位置等初始状态信息,按照运行时序通过现场总线控制电气传动装置以及各个辅机按照既定时序运行,实现升船机的正常运行功能,同时各传动设备将其运行参数和状态传递给传动控制站。
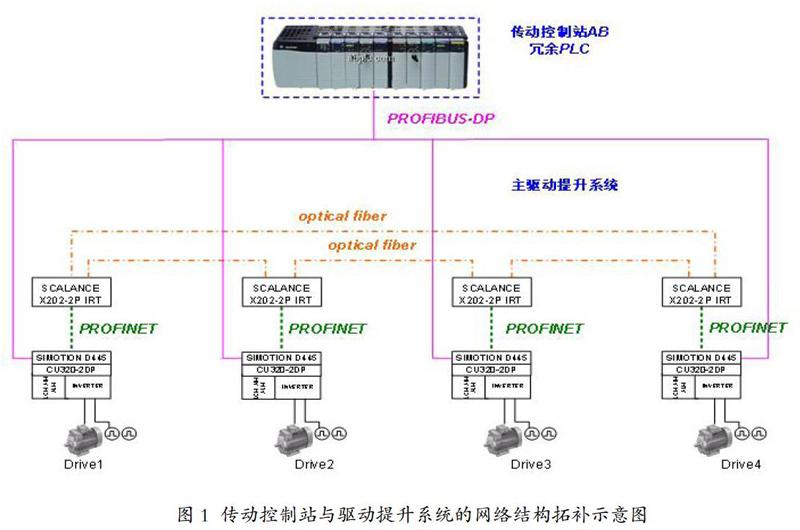
向家坝升船机驱动系统采用传动控制站通过升船机主干冗余双环网与上位机和其它控制子站实现数据交换,变频调速柜与传动控制站PLC之间通过PROFIBUS DP现场总线实现通讯,主要通信内容是传动控制站的控制指令、参数,同时返回驱动系统运行状态及故障报警信息,通过网络读取外围 I/O 信号给变频调速柜等。
四套变频调速柜之间通过 PROFINET 进行通讯,每套变频器连接到 SCALANCE X202-2P IRT上转换为光纤信号和其他驱动点通讯,实现四套电气传动装置之间无扰主从切换控制和力矩均衡控制等。传动控制站与驱动提升系统的网络结构拓补示意图如下图所示。
1.2 传动系统处理单套驱动故障方式分析
在升船机运行过程中,当四套传动装置中有任意 1 套损坏(或 1 台电机损坏),由同步轴传力驱动运行,其负载被正常运行的传动装置平均负担,电气传动系统发出正常停机命令,其余 3 套传动装置只需要能够不间断继续驱动承船厢完成当次正常停止运行即可,所以电气传动系统采用的是 4 套传动装置对等结构,仅在 1 号传动装置 SIMOTION D445 中运行时序控制、速度给定控制、速度斜坡控制、位置给定曲线控制、位置跟随控制、对位控制、位置纠正控制以及系统全局故障处理等全局控制程序,当 1-4 号传动装置任何 1 套因故障退出运行时,其它 3 套正常运行的传动装置接收到退出运行传动装置的退出运行故障信号,其它 3 套正常运行的传动装置直接进入正常停止运行流程并自动地重新在 3 套正常的传动装置中合理分配运行负荷,实现正常停止运行流程过程中的出力均衡。若 1 号传动装置出现因故障退出运行时,则系统全局控制程序失效,比如:位置跟踪控制、对位控制以及位置纠正等主要功能无法正常运行,无法实现 3 套传动装置仍能不间断继续驱动承船厢完成当次运行并完成手动对接的要求。
2单套驱动装置故障情况下应急运行技术改造方案
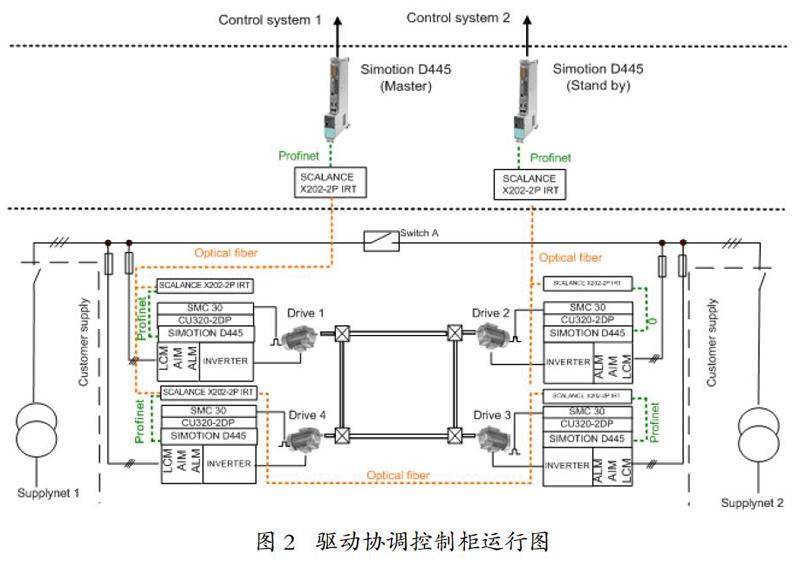
在传动控制站与传动装置之间增加一套驱动协调控制柜,通过两个互为冗余的控制器SIMOTION D445来协调升船机电气传动系统的时序控制、速度给定控制、速度斜坡控制、位置给定曲线控制、位置跟随控制、对位控制、位置纠正控制以及系统全局故障处理等。
驱动协调控制站与四套变频调速柜之间均通过 PROFINET 环网进行通讯。驱动协调控制站与传动控制站之间采用现场总线PROFIBUS DP实现通讯,双通道的DP通讯互为备用,当一条通讯链路故障时,不影响系统正常运行。驱动协调控制柜接受从传动控制站传来的控制命令,并将变频器和电机的运行状态和故障信息通过通讯的方式传给传动控制站PLC,重要的控制命令请求除了网络通讯方式收发外,还应增加硬线通信,主要信号包括制动器的上闸松闸信号、系统正常停机命令、快速停机命令、紧急停机、紧急停机复位、上下游准确对位信号等,如图2所示。
根据升船机船厢运行行程,将船厢运行速度、加速度、上/下游目标位置、船廂水深、船厢位置标定值等关键控制输入信号引入驱动协调控制站控制器中,在驱动协调控制站中创建“虚拟主驱动点速度给定模块”和“虚拟主驱动点位置给定曲线模块”构成的虚拟主驱动点模型,获得虚拟主驱动点的速度给定、位置给定曲线以及加速度给定等参考信号,以此构成向家坝升船机“机械同步+力矩均衡”电气传动系统。四个驱动点传动装置同时从驱动协调控制站的虚拟主驱动点获得速度给定、位置给定曲线、加速度给定等信号,驱动协调控制站数据采用等时广播方式有效发送给各传动装置。
主驱动点传动装置和从驱动点传动装置均工作在速度闭环的模式下,主驱动点传动装置始终跟随驱动协调控制站发送的速度给定命令,从驱动点传动装置的速度给定由驱动协调控制站发送的速度给定命令以及速度补偿给定(速度补偿给定是主驱动点传动装置的实际力矩信号和相应驱动点传动装置的实际力矩信号偏差经调节后的输出值)来决定,使相应从驱动点传动装置的速度作补偿性调整,控制船厢安全、平稳运行。
3 结论
新增协调控制柜能够弥补向家坝升船机驱动系统在设计功能上的欠缺,为向家坝升船机的稳定、高效、安全运行提供进一步的保障。单套驱动系统故障仅仅是造成船舶滞留承船厢的一种故障,只有继续研究总结,通过切实可行的技术研究和现场改造,才能彻底避免船只滞留承船厢事件发生。
参考文献:
[1]谢丹雄,肖彦直.垂直升船机四驱动点传动系统的设计[J]. 起重运输机械,2012(12):32-34.
[2]段波,张生权.垂直升船机电力拖动与控制设计研究[J]. 人民长江,2009(2):88-90.
[3]屈斌.三峡升船机电气行程同步控制设计[J].人民长江,2016(12):69-75.
