
基于ARM处理器的智能巡游机器人
2020-12-07 08:45黄志芳卢怡霖陈旭陈炜康何梓杰
物联网技术 2020年11期
黄志芳 卢怡霖 陈旭 陈炜康 何梓杰
摘 要:文中提出了一款以STC12C5A60S2单片机为控制中心,以STC8F2K08S2单片机为辅的智能巡游机器人的设计。通过GY-25模块、GY-53模块、HY-SRF05超声波模块、驱动芯片和直流电机等模块,实现机器人在室内自动避障和巡游功能;采用DHT11温湿度模块、火焰传感器、MQ-2模块监测室内的温湿度、空气质量、是否发生火灾等信息。当发生异常情况时,该机器人通过GSM模块短信或电话联系用户。该系统性能良好、安全可靠、操作简便、成本低廉,能有效监测室内环境质量。
关键词:室内自动避障;智能巡游;ARM;机器人;GSM通信;STC12C5A60S2
中图分类号:TP242.6文献标识码:A文章编号:2095-1302(2020)11-00-03
0 引 言
当今世界,科技水平不断提高,制造业发展迅速,很多集成化的大型工厂或车间应运而生。集成化的大型工厂和车间在提高生产效率的同时,也增加了气体泄漏、发生火灾的概率,一旦发生危险情况,往往造成较大的经济损失。其次,现在家居住房,天然气、大型家电产品走进千家万户,天然气泄漏、家电产品电路故障等也是引发家居火灾的重要因素。因而制作一款基于ARM处理器与GSM通信的智能巡检机器人很有必要。它可以在大型工厂车间各个区域自动巡游监测各项安全指数是否正常;在家庭安全防护方面,若监测到煤气泄漏等危险情况时,能够及时采取相关措施,有效降低危险的发生。
近年来,社会飞速发展,各种产品需求量不断增加。在保证生产效率的同时,本文所设计的智能巡检机器人目前主要有两大应用。
(1)大型工厂车间:自动避障、巡游、监测规划区域内的安全信息。机器人可设置定时定期和随机巡查,特别是夜间无人巡查时,可以弥补人工巡查的缺漏点。
(2)家用方面:检测室内的空气质量。当无人在家时,能监测天然气、室内空气质量等相关信息。
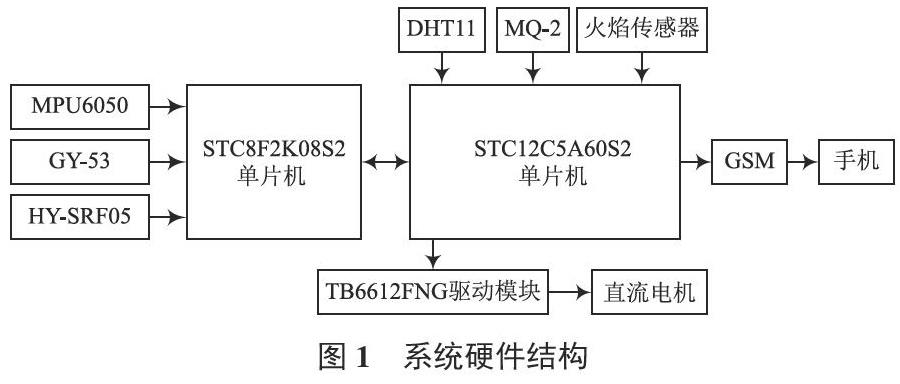
1 系統的硬件结构
本系统硬件结构如图1所示。它以STC12C5A60S2微处理器为控制中心,辅以STC8F2K08S2单片机,包括GY-25模块、GY-53模块、HY-SRF05超声波模块、TB6612FNG驱动模块、直流电机、DHT11温湿度模块、火焰传感器、MQ-2模块、GSM模块等。
STC12C5A60S2是宏晶科技生产的“新一代8051单片机”。它有以下特点:
(1)指令代码兼容传统8051,而且速度快8~12倍;
(2)内部集成很多功能强大的寄存器,如8路高速10位A/D转换,E2PROM等。
STC8F2K08S2 是一款增强型51单片机,具有以下特点:
(1)尺寸小但性能强,需要自己搭建的电路很简单;
(2)内部时钟频率较高,可达27 MHz,其执行速度相比STC12C5A60S2有了更大提升;
(3)有两个硬件串口,内部RAM较大,适用于需要两个串口或者RAM需求高的场合。
1.1 室内巡游与避障
室内巡游与避障功能通过GY-25模块、GY-53模块、HY-SRF05模块及TB6612FNG模块完成[1]。
GY-25是一款倾斜度模块,具有成本低的特点。其工作原理是陀螺仪与加速度传感器配合工作,经过数据融合算法得到角度数据。通过这个模块可以实现机器人定角度旋转。
GY-53是一款红外测距传感器。将其安装在机器人的底部,调节适当的角度即可测量出机器人与不同方向目的地的距离[2]。
HY-SRF05是一款超声波测距传感器。将其安装在机器人的正面,可以检测前方障碍物与机器人的距离,从而实现避障。
TB6612FNG是一种用于直流电机工作的驱动芯片。其采用MOS管桥结构,有两个输出通道,能够同时驱动两个直流电机,可以更好地控制机器人移动。
1.2 室内温湿度检测
室内温度和湿度检测采用DHT11温湿度传感器[3]。它是一种自含校准的传感器,供电为DC 3.3~5 V,具有成本低、响应速度快、抗干扰能力强、信号传输距离长、数字信号输出、精确校准的特点。
1.3 室内易燃气体检测
室内易燃气体检测采用MQ-2气体传感器[4]。当MQ-2气体传感器工作在DC 5 V时,其阻值随被测气体的浓度(成分)而变化,并将被测气体的浓度(成分)信号转换成相应的电信号。MQ-2传感器对天然气、液化石油气等可燃气体有很高的灵敏度,符合本设计需要检测安全隐患的要求,且具有良好的抗干扰性。
1.4 室内明火检测
室内明火检测采用火焰传感器模块。远红外火焰探头能够感知外界红外光的变化,进而转换成电流变化。红外光的强度与电流数值的大小成反比例关系,通过A/D转换器将电流变化转换成数值变化。
1.5 GSM通信
GSM模块是一块集成电路板。它上面含有基带处理和射频芯片、存储器记忆芯片,这两种芯片能够提供标准接口。通过单片机控制GSM模块,在某些情况下通过短信或语音电话联系用户[5]。
2 系统的软件设计与实现
单片机的程序采用Keil软件编写。它采用模块化编写方式,最终编译生成“.hex”文件,再由专用的下载器将二进制文件烧录至单片机中[6]。
2.1 巡游与避障功能
任务1:室内巡游;
任务2:自动避障。
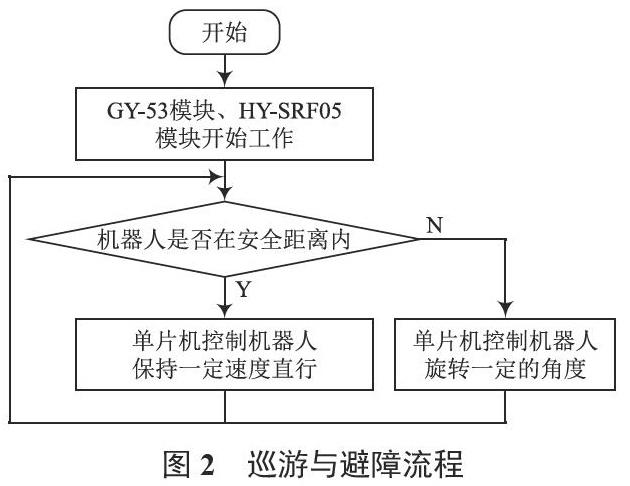
系统上电后,首先GY-53模块、HY-SRF05模块工作:检测前方是否有障碍物并将距离值返回微处理器,设置一定的距离作为机器人行走的安全距离。若前方无障碍物,且机器人处在安全距离之内,微处理器控制电机运动让机器人保持一定的速度前行[7];若机器人处在安全距离之外,微处理器控制机器人转动一定的角度,之后继续判断机器人是否处于安全距离之内,由此循环,实现机器人在室内巡游、避障[8]。巡游与避障流程如图2所示。
2.2 室内温度、湿度、易燃气体、火焰检测
任务1:室内温湿度测量;
任务2:室内易燃气体检测;
任务3:室内火焰检测。
各项任务的数据采集采用分模块的设计方法。首先,编写模块的时序程序,在主程序中调用得到返回值再加以转换便得到室内的各项数据。其次,将各个传感器安装在机器人上,随着机器人在室内的巡游,便可以通过测量得到室内不同位置的安全信息[9]。
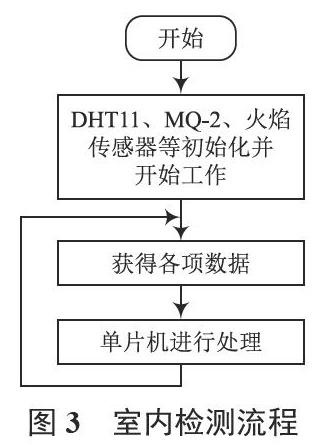
室内检测流程如图3所示。单片机上电开始工作后,各个模块开始工作,采集环境的各项信息并返回单片机,循环操作。
2.3 GSM通信功能的实现
采用GSM通信模块的主要任务,是当室内温湿度、空气等参数发生异常时,能够及时通知用户,采取必要措施,避免造成更大损失[10]。
GSM通信流程如图4所示。它采用循环比较的方式:单片机持续接收各个检测模块返回的数据,获取室内各项参数;单片机设置相应阈值,当超出阈值时,单片机通过GSM模块发送短信或拔打电话给用户,反之则继续采集数据,进行比较。
3 系统的整体构造
本系统设计的机器人如图5所示。其形状类似于圆柱体,该设计有助于整体运行时更加平稳,而且内部有足够大的空间存放元器件。机器人外观主要采用的是亚克力板。其制作工序为:利用雕刻软件CorelDRAW画出图形,连接雕刻机将亚克力板雕刻成形;之后将各部分元器件按照设计的位置安装在亚克力板上,利用螺丝、热熔胶等工具将各部分组合起来。
4 实验结果
试验结果显示,机器人可以在室内自动巡游,当遇到障碍时,能够自动规划实现避障。在人为模拟的室内环境,如温度过高、湿度过高,存在天然气或煤气等可燃性气体、明火等情况下,机器人能够及时发送短信或电话通知用户。但远红外火焰传感器对火焰的监测受光照等因素影响,还有一定的误检率和误报率,后期将对远红外火焰传感器的算法再做进一步优化。
5 结 语
试验表明,基于ARM处理器的智能巡游机器人达到了设计要求。它实现了既定的目标功能,也为工业生产、家居安全提供了一种辅助监测工具,性能稳定,安全可靠;但也存在一些不足,这给后续的研究提供了改进方向。智能巡游机器人不仅能监测工厂、室内的安全,也能够在危险区域,替代人类去执行巡游监测功能,有效保障了人们的生命安全。
参考文献
[1]易礼智. 基于机器视觉的避障智能小车系统研究[D]. 长沙:中南大学,2012.
[2]郅富标.基于红外距离传感器的特雷门琴设计[J].北京工业职业技术学院学报,2019,18(3):24-27.
[3]石磊,张捷,陈敏锐. 基于单片机的湿度测控系统[J]. 科技风,2008,21(21):71.
[4]陈思,林锦纯.关于仓库火灾排查机器人的研究[J].价值工程,2019,38(19):135-138.
[5]赵圆圆,唐绪伟,唐晨光.基于信息化单片机技术应用课程教学设计[J].教育教学论坛,2019,11(31):268-269.
[6]刘瑞妮.基于单片机的自动浇花系统的设计[J].微型电脑应用,2019,35(7):63-65.
[7]申耀武,郭力生,林震,等.基于单片机控制的爬楼梯机器人设计研究[J].轻工科技,2019,36(7):84-86.
[8]陈峰,张泽华,朱彦成,等.智能风扇控制系统的设计[J].电子制作,2019,26(13):25-26.
[9]王美确,陈明霞,李顺艳,等.基于智能家居的APP红外控制系统[J].科技风,2019,32(18):83-84.
[10]严寅贇.淺谈单片机通信系统中无线通信技术的应用[J].计算机产品与流通,2020,37(3):48.
猜你喜欢
家居廊(2022年12期)2023-01-05
环球时报(2022-04-18)2022-04-18
装备制造技术(2021年5期)2021-08-14
电子制作(2019年13期)2020-01-14
漳州职业技术学院学报(2019年1期)2019-11-16
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年11期)2018-08-04
宝藏(2018年1期)2018-01-31
西安工程大学学报(2016年6期)2017-01-15
