基于测量机器人的隧道多测站变形监测方法分析
2020-12-07 02:56:08张海涛李正文
中华建设 2020年11期
张海涛 李正文
一、引言
隧道变形监测是利用各种测量仪器,对隧道某一横断面上围岩或衬砌断面几何形状的数据采集;通过连续观测断面上的监测点,来监测隧道结构的几何变形,为施工、运营的隧道提供可靠的数据,使工程得到重要保证。隧道变形监测技术随着科学技术的更新而不断发展变化,最初测量所用的仪器是专门用于断面测量的激光断面测量仪,自从测量机器人出现以后,现代隧道变形测量方法一般都是采用测量机器人和计算机断面自动极坐标测量系统来实现。
目前大部分隧道变形监测均是基于单测站即单台测量机器人,多测站变形监测首先可以使得监测的变形区域扩大,拓宽单台系统的应用领域,多测站测量机器人变形监测实质上是对多个自动极坐标变形监测系统进行有机集成,其基本单元依然是自动极坐标变形监测系统,系统结构也基本一样。
二、极坐标测量原理
1.基本原理
极坐标测量是指获取目标点至测站点的角度和距离,如果测站点坐标已知的情况下,那么就可以获取目标点的三维坐标。其基本原理如下图所示:

图1 极坐标测量原理图
以隧道测量为例,以测站点O点(架设测量机器人的工作基点)为坐标原点,以测站沿铅垂线的反方向为Z轴,以平行于隧道纵方向为X轴,建立空间直角坐标系O-XYZ(左手坐标系)。P点为被测目标点的位置,α为测站点O点与P点连线的水平角,β为测站点O与P点连线的垂直角,S为测站点O与P点连线距离,即斜距,则根据测站坐标可得出P点三维坐标:

上式可以得出测站点与目标点空间位置关系,当不知道测站点的坐标时,它们是相对位置关系,但同时联测3个或以上的基准点(已知控制点)时,通过后方交会或其他方法可算出测站点三维坐标,此时控制点与目标点处于同一个坐标当中,从而可得到P点绝对坐标值。
2.精度分析

将上式转换为中误差形式并用矩阵表示为:
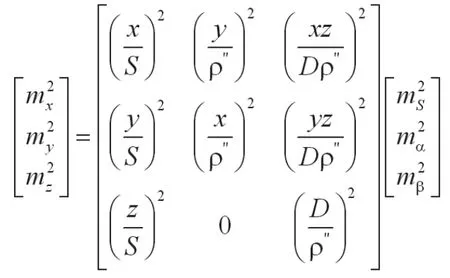
其中:mx、my、mz分别为点位坐标x、y、z的中误差,ms为测边中误差,mα、mβ分别为水平角和天顶距的测量误差。根据赫尔默特点位误差估计公式有:

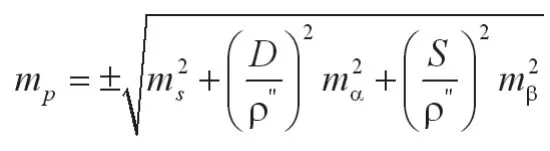
通过以上两式可得到P点的点位中误差为:
三、变形监测网的布设和要求
变形监测网一般分为相对监测网和绝对监测网。绝对监测网是指有部分点位于变形体外;相对监测网是指所有点均位于变形体上。当变形体的范围(包括变形影响范围)比较小时,可以将监测网布设成绝对监测网的形式。所以,绝对监测网多用于工程建筑变形监测,如高层或超高层建筑变形监测、大坝坝体变形监测等工程。当变形区域特别大,或者变形监测范围比较难确定时,只有采用相对监测网的形式。
考虑到隧道的特殊状况,不论基准点、目标点还是测站点都只能布设在隧道的狭长空间中,为了发挥测量机器人自动测量优势,通常将变形监测控制网布设成最简单的控制网形式,也就是极坐标测量形式。极坐标测量的简单控制网中包含三类点:基准点、测站点和目标点。基准点布设是监测网系统必须的,且一般是已知坐标点,它不仅为监测网提供方位基准还为角度差分、距离差分和高程差分提供基准。对基准点的基本要求是方便适用和稳定可靠。控制网建设时就需考虑基准点的稳定性,如要埋设到隧道壁上,一般都位于隧道两端稳定或相对稳定区域且离变形区域有足够远距离。为了保证基准点能提供可靠的基准,基准点数目应不少于3个,原则上隧道两端应各布设2个。目标点(监测点)应尽量均匀布设在整个变形区域内,且能最大程度反映变形区域的位置,目标点上需安置有类似基准点的对准测站点站的反射棱镜。隧道中的测站点一般只能布设在变形区域内,应选在能与基准点、目标点通视的位置,以便观测。
以上是单个测站上的监测网的布设,而多个测站之间通过共同观测基准断面进行坐标的传递,共同观测的基准点上安装360°棱镜,而在变形区域两端也布设若干基准点,如图2所示:
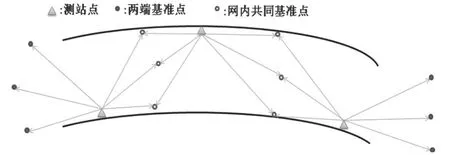
图2 变形监测网布设示意图
四、多测站变形监测系统结构和组成
1.系统结构
多测站变形监测系统可由单台或几台联网的计算机控制多个测站上的测量机器人进行持续的周期监测。对于那些交叉区域的点来说就可以进行交汇测量,可以提高精度和可靠性,同时可监测的范围也扩大了,但范围扩大的同时也带来了新的问题,很难找到多个满足要求的稳定不动的测站位置,多测站往往有部分甚至是全部位于变形区域之内,变形区内的测站可能大部分都找不到稳定的参考点,这时就需要通过测站测量机器人之间的观测来传递参考基准,或通过观测共同基准点传递基准,测站测量机器人与参考点之间组成一个网,适时观测并解算测站坐标,为极坐标测量提供动态的参照基准。一般多测站测量机器人变形监测系统结构如图3所示:
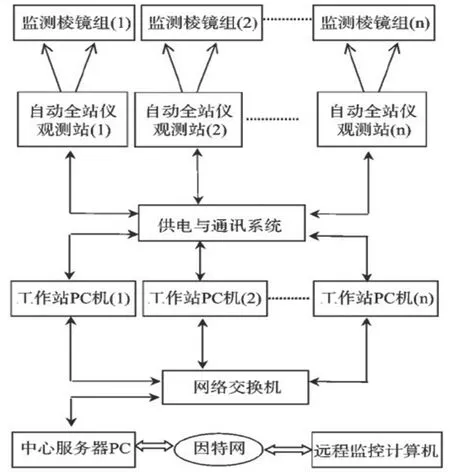
图3 多测站测量机器人变形监测系统结构图
2.系统组成
隧道多测站变形监测系统一般由设备和软件组成:
(1)系统设备
为满足动态基准组网测量和变形点监测的需要,考虑以下配置:
① 在每一个测站点上安置一台测量机器人;
② 在每一个基准点和监测点上安置棱镜:测站间的基准点上安装360°圆棱镜,监测区域两端基准点及监测点上安装徕卡圆棱镜;
③ 一台主控计算机(服务器)和多台工控机;
④ 系统采用有线通信和无线通讯相结合,工控机与测量机器人之间通过通信及供电电缆连接,主控计算机和工控机之间采用无线通讯。
(2)系统软件
隧道多测站变形监测系统软件包括服务器上的数据管理软件和各工控机上的数据自动采集软件两大部分。
数据管理软件用来获取各测站点实时数据,其实质是控制网的全自动测量。管理各工控机写来的数据,进行测量流程控制,网络控制和数据处理。
数据自动采集软件用来控制各测量机器人按要求的观测时间、测量限差、观测点组进行测量,并将测量的结果传入服务器上的管理数据库中。
五、结语
本文阐述了隧道变形监测中常见的极坐标测量方法基本原理和精度,分析了变形监测网的布设和要求,最后介绍了基于测量机器人的隧道多测站变形监测系统结构和组成,为开展隧道变形监测提供了科学、合理的测量方法。
猜你喜欢
华中建筑(2022年4期)2022-04-14 07:50:52
现代测绘(2021年1期)2021-04-28 10:19:56
河北理科教学研究(2020年1期)2020-07-24 08:14:26
中学数学研究(广东)(2018年23期)2018-03-05 07:54:34
高中生·天天向上(2016年8期)2016-11-22 09:22:46
数字通信世界(2015年10期)2015-12-21 12:22:54
导航定位学报(2015年2期)2015-06-05 09:27:41
铁路通信信号工程技术(2014年1期)2014-02-28 16:55:09
中国质量与标准导报(2013年8期)2013-03-11 19:54:11
全球定位系统(2010年2期)2010-07-18 03:49:58