
脊柱机器人置钉错误的多因素分析
2020-12-04 06:36陈豪杰张嘉男郝定均刘团江杨俊松许晓舟赵帅王鹏涛
骨科 2020年6期
陈豪杰 张嘉男 郝定均 刘团江 杨俊松 许晓舟 赵帅 王鹏涛
【关键字】 脊柱机器人;椎弓根螺钉;骨质疏松;肥胖;危险因素
椎弓根螺钉固定技术自发明以来广泛应用于脊柱骨折、脊柱退变疾病、脊柱畸形等手术中,对于脊柱外科的发展具有里程碑意义。椎弓根置钉范围有限,其周围组织也很重要,因此该技术存在一定风险和置钉并发症,提高置钉准确性是椎弓根螺钉固定技术应用成功的关键[1⁃2]。随着医工结合的发展,影像导航及机器人技术在辅助椎弓根螺钉置入方面逐步得到应用。虽然已有文献报道,影像导航下椎弓根螺钉置钉及机器人辅助置钉具有准确性高、辐射剂量较低和置钉并发症较少的优势[3⁃4],但是机器人置钉的准确性波动较大,仍然具有一定争议[5]。Ringel 等[6]的随机研究结果显示机器人辅助椎弓根螺钉置入对比徒手置钉并没有在准确性上显现出优势。Marcus 等[7]的荟萃分析结果显示,对比徒手置钉,机器人辅助置钉并没有显现出更高的准确率。Staartjes 等[8]的荟萃分析也表明机器人辅助置钉与徒手置钉的螺钉翻修率并没有显著差异。
目前,Renaissance 机器人系统是应用较为广泛的脊柱机器人系统,其精准性及安全性受到了全球脊柱外科医生的广泛关注。现在应用的脊柱机器人是半自主机器人,其中大部分步骤需要手术人员手动操作,可能会因为不同的情况对置钉的准确性产生影响。不少学者已经注意到一些可能影响机器人置钉的因素,但是目前尚无针对机器人置钉失败或不准确的危险因素研究。
本研究为单中心回顾性研究,通过分析2017年6 月至2019 年12 月在西安交通大学医学院附属红会医院脊柱病医院行Renaissance 机器人(Renais⁃sance,Mazor Robotics,以色列)辅助椎弓根螺钉置入的162 例病人的临床资料,探讨机器人置钉错误的危险因素。
资料与方法
一、纳入标准与排除标准
纳入标准:①使用Renaissance 机器人辅助置钉;②使用机器人辅助置钉过程中因为钉道位置不佳而中止并手动置钉的;③非系统错误导致的计划螺钉未能经机器人辅助放置(如匹配失败等)。
排除标准:因机器人自身系统问题造成的注册失败。
二、一般资料
共纳入1 023颗螺钉,来自162例病人(男83例,女79例;年龄为48~76岁)。所有病例来自3个手术组,每组主刀医生均为从事脊柱外科工作15年以上的高级职称脊柱外科医生,每组在临床使用前均接受过模拟机器人辅助螺钉置入训练,并排除每组使用的前10个病例。术前病人均需行X线、CT(1 mm厚扫描、矢状位和冠状位重建)和MRI检查,明确手术指征,术前检查无明显禁忌证。
三、操作方法
病人术前行1 mm 厚度的CT 平扫,在Renais⁃sance机器人软件中导入CT数据后规划所需置入螺钉的最佳位置与长度。该计划由医疗组在手术前根据手术方案执行,以确保设计合理。
病人全身麻醉,采用俯卧位。消毒铺单后将机器人工作站连接到“C”型臂X线机,根据手术方案,使用合适的固定器将金属标记放置于正确位置。“C”型臂X线机行正位及斜位透视,将所得正、斜位影像数据与术前CT数据在脊柱机器人上进行配准、注册,并根据情况适当微调螺钉的进针点及进针角度。不同的疾病及置钉设计可能需要多次定位。根据手术要求,选取合适的“桥”并安装,在确保稳定后,将机器人安装于病人背侧的支架上,根据机器人提示选取指定的机械臂并安装,顺机械臂孔安放通道,术者顺通道钻孔、置入导针(经皮置钉需要先在表皮进钉点切皮处理)。置入导针后行术中“C”型臂X 线机正侧位透视,根据经验判断导针位置是否需要调整,对于开放手术的病例,在螺钉置入前应用攻丝扩大钉道后使用探针确认钉道的完整性,对于椎弓根皮质骨疑似有损伤的病例立即手动调整钉道,最后确认无误后置入椎弓根螺钉。对于经皮置钉的病例,根据经验认为需要调整的螺钉,以传统方式行透视辅助下置钉。
四、术后评估
记录每枚螺钉对应病人的年龄、性别、身体质量指数(body mass index,BMI)、骨密度、疾病类型、翻修情况和螺钉置入途径(经皮或开放置入)等。其中骨密度采用双能X 线吸收测定法进行测量。采用Nash⁃Moe法评估椎体旋转的程度:0度表示无旋转,Ⅰ~Ⅱ度定义为轻度旋转,Ⅲ~Ⅳ度定义为重度旋转。
在术后拔除引流管后,对固定节段螺钉行CT扫描(层厚1.25 mm)。在医院图像存档与传输系统上通过PacsClient 软件的CT 图层进行测量和分析,采用Gertzbein 和Robbins 分类法[9]评估每枚螺钉的位置(术中调整过的螺钉除外):椎弓根骨皮质完整为A级,螺钉穿透椎弓根骨皮质<2 mm为B级,≥2 mm且<4 mm为C级,≥4 mm且<6 mm为D级,>6 mm为E级。A级和B级评估为满意置钉,纳入满意组;C级、D级、E级、术中调整螺钉以及非技术原因导致的无法注册的螺钉均被评估为置钉错误,纳入不满意组。
置钉成功率定义为满意组螺钉数/预计置入总螺钉数,准确率定义为满意组螺钉数/机器人辅助置入的螺钉数(预计置入总螺钉数-无法注册的螺钉数)。非技术原因导致螺钉无法注册时,由机器人工程师判定,螺钉分级由两位外科医生分别进行评估,如果两位评估者的结果不一致,则需要影像科医生的意见作出最终分级。
五、统计学方法
采用SPSS 22.0统计学软件(IBM公司,美国)进行统计学分析。采用卡方检验或Fisher精确检验对满意组和不满意组中的相关数据进行单因素分析,根据卡方检验结果(为避免遗漏可能的危险因素,设置P<0.1 为筛选标准),将具有统计学意义的相关因素纳入二元Logistic回归,分析机器人辅助置钉错误的危险因素,以P<0.05为差异具有统计学意义。
结 果
术前预计机器人辅助置钉1 023 枚,其中37 枚螺钉注册失败(2 例先天性脊柱侧凸病人,2 例合并重度骨质疏松需行腰椎手术及1例重度骨质疏松骨折需要手术减压的病人);术后共评估986 枚螺钉,术中手动调整39 枚螺钉,术后评估为C 级、D 级、E级的螺钉共50枚。故满意组有897枚螺钉,不满意组有126枚螺钉,置钉成功率为87.67%(897/1 023),机器人辅助置钉的准确率为90.97%(897/986)。
有3例病人考虑有因螺钉引起的神经症状,2例为下肢轻度疼痛不适,1例为肋间放射痛,均经保守治疗后(术后3个月)复查时症状消失。有3例病人发生伤口浅表感染,给予更换敏感抗生素,积极伤口换药后痊愈。2 例合并糖尿病病人发生伤口不愈合,给予伤口负压封闭引流术治疗后伤口愈合良好。所有病例均未发现严重的神经或血管损伤。典型病例见图1。
单因素分析结果显示两组在性别、是否为翻修手术及是否为腰椎退变性疾病方面的差异无统计学意义(P 均>0.05),在年龄、骨密度、BMI、椎体旋转程度等方面的差异均有统计学意义(P均<0.05),见表1。
二元Logistic 回归分析显示Renaissance 机器人辅助椎弓根螺钉置入错误的独立危险因素为肥胖(BMI≥28 kg/m2)[OR=4.173,95%CI(2.388,7.293),P<0.001]、骨质疏松[-3.5 SD<T≤-2.5 SD 时,OR=1.850,95% CI(1.047,3.267),P=0.034;T≤-3.5 SD时,OR=13.225,95%CI(7.272,24.050),P<0.001]、椎体重度旋转[OR=9.758,95% CI(3.849,24.736),P<0.001]和先天性脊柱侧凸[OR=11.762,95% CI(5.351,25.855),P<0.001];年龄(P=0.200)、退变性脊柱侧凸(P=0.543)、青少年特发性脊柱侧凸(P=0.959)、脊柱骨折(P=0.674)及经皮置钉(P=0.628)不是Renaissance 机器人辅助椎弓根螺钉置入错误的危险因素。见表2。
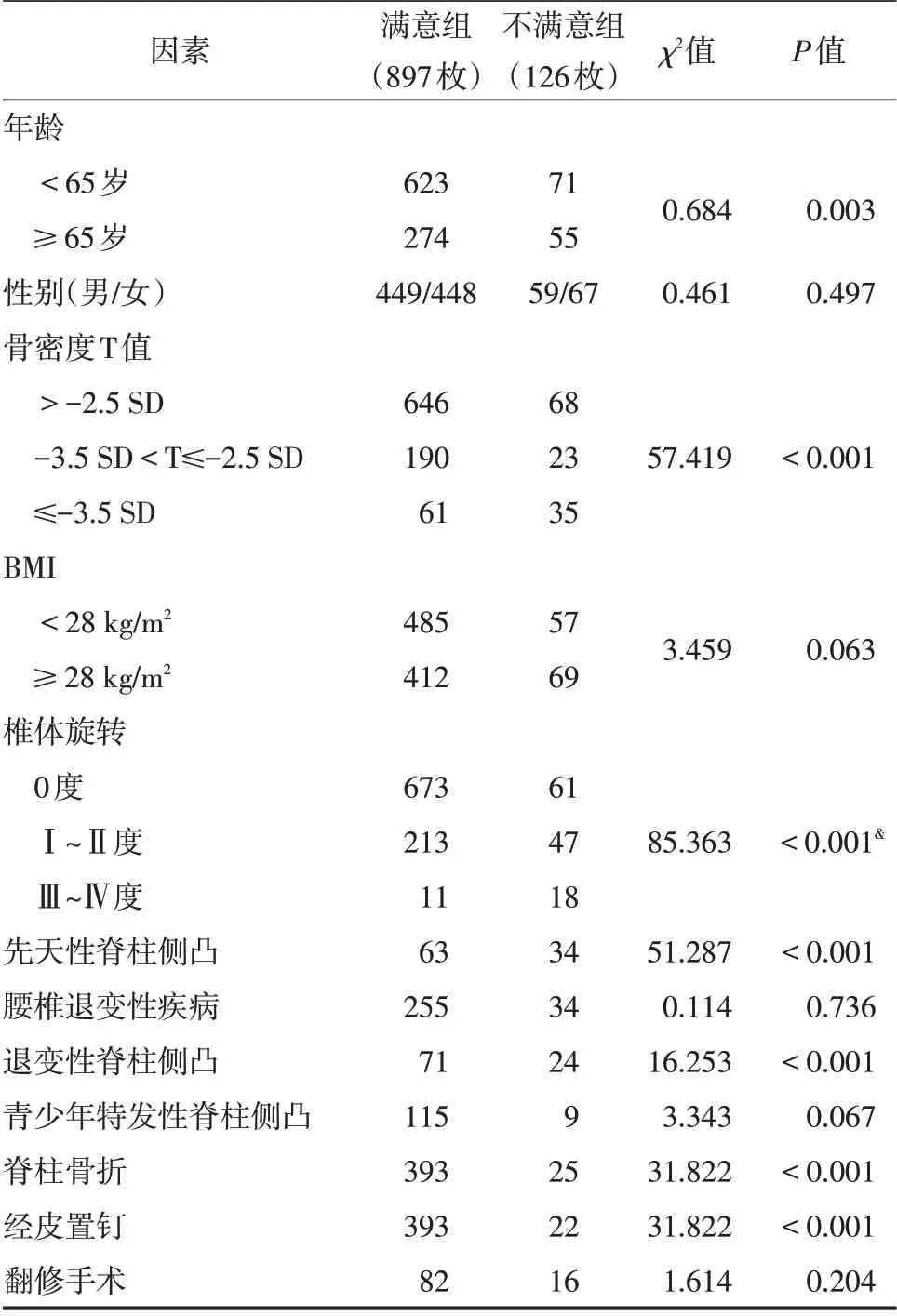
表1 Renaissance机器人辅助椎弓根螺钉置入错误的单因素分析
讨 论
随着机器人辅助技术在脊柱外科手术中的应用和发展,高稳定性和高精度的优点逐渐被报道。但在既往文献中报道的置钉准确率为90%~98%,波动范围较大[1,2,4,7⁃8,10⁃11],这可能与研究纳入的病例涉及不同疾病,同时所用的机器人型号不同有关。本结果中机器人辅助椎弓根螺钉置钉的成功率为87.67%(897/1 023),准确率为90.97%(897/986),考虑到本研究纳入了一定数量具有较高难度的脊柱畸形病例,综合来看成功率及准确率与既往研究差异不大。

图1 病人,女,54岁,因“腰椎间盘突出症”入院,行机器人辅助下微创经椎间孔入路椎间融合术 a:将机器人安装于病人操作台上;b:在机器人操作系统中对螺钉方向与进钉点进行适当调整,确定螺钉的长度及直径等;c:在专用的机械臂上插入导针并探查钉道情况;d:术后复查CT示右侧螺钉疑似突破内侧椎弓根骨皮质,评估为B级置钉,左侧螺钉位置良好,评估为A级,均纳入满意组

表2 Renaissance机器人辅助椎弓根螺钉置入错误的危险因素分析
目前,脊柱机器人仍然只是辅助置入椎弓根螺钉,操作模式是“机器人+外科医生+病人”。机器人在系统正常运行以及操作正确的情况下稳定性较高,当外科医生熟悉机器人辅助操作过程时,可以大大降低对置钉的人为干扰[12⁃13]。因此,病人的相关因素是影响螺钉置入成功率和准确性的主要因素,同时因为脊柱机器人为精准度要求极高的六自由度多臂机械,因此其抗外界阻力及干扰能力较弱,加大了病人相关因素对其的影响。随着对机器人临床应用关注的增加,研究者们已经意识到了一些可能的干扰因素,但是并没有被相关研究所证实。
本研究中二元Logistic 回归分析结果显示骨质疏松及肥胖都是置钉错误的危险因素,之前的一些研究也认识到诸如骨密度、肥胖等因素可能是影响机器人辅助置钉准确性及匹配失败的原因[14⁃15]。笔者发现,部分骨质疏松病人由于骨质情况差,虽然使用了皮质骨骨面处理器[4⁃5,10⁃11]处理进钉点,但仍有一些针头无法牢靠固定在骨面,轻微的抖动便会导致咬合点偏移。既往的一些研究也发现如果进钉点存在骨性“斜坡”,在合并骨质疏松的情况下,容易出现“套管滑移”的问题,进而导致螺钉置入的错误[3,6,16]。对于经皮置钉的病例,如果合并骨质疏松,在安放套管时软组织张力也更容易导致套管偏移。同时,严重的骨质疏松也可能造成匹配的失败。实际操作中还发现,对于行下腰椎手术的肥胖病人更容易出现偏移,这可能由于软组织太厚,组织张力较高,同时进入组织的套管较长,表皮稍有牵拉即有可能引起套管远端较大的偏移。
本研究结果亦显示先天性脊柱侧凸、椎体重度旋转与螺钉置入错误有关。对于较为柔软的先天性脊柱侧凸的病例,机器人在使用时偶尔会出现注册困难,笔者认为可能是由麻醉后肌肉松弛,导致术中体位与术前CT 扫描时的体位有较大差异造成的。我们发现在椎体严重旋转的情况下,由于机器人机械臂的有限性以及周围软组织的遮挡,部分螺钉往往难以准确置入。Tsai等[17]也发现机器人对体位要求较高,术中体位与术前CT检查时体位不能有太大差异,否则难以进行匹配。Hu等[18]回顾分析了102例使用机器人辅助置钉的病人,其中89.5%的病人为畸形或翻修病例,置钉成功率为87.5%(949/1 085),部分病人因为肥胖、重度骨质疏松等原因并没有按计划使用机器人,在成功使用机器人的病例中有多达110枚螺钉需要二次手动调整,且有15枚螺钉最终放弃置入。本研究中还纳入了青少年特发性脊柱侧凸及退变性脊柱侧凸的病例,但结果显示这两种疾病并非置钉错误的危险因素,我们考虑这一结果可能与纳入样本量较少及纳入的病例并非严重畸形的病例有关,但这两类病例中如果包含严重的椎体旋转的情况,仍然可能在使用过程中发生注册失败或者置钉不满意的情况。
最后,在我们最初的使用过程中发现,对于背部软组织较厚的肥胖病人,开放手术中有时难以保证机器人所引导的通道在伤口内,往往出现需要延长开放的切口,或是需要重新行经皮置钉,增加了不必要的损伤,也不符合对机器人精准化和微创化的要求。Ringel 等[6]在其前瞻性随机研究中发现对于下腰椎和骶骨螺钉的置入方面,机器人并没有在准确性上显现出优势。当然,机器人辅助置钉技术的出现也为脊柱外科带来了一些新的改变,但是该技术因为尚处于发展的早期,仍然具有使用的局限性,需要选择合适的案例来利用机器人的优势。
本研究旨在探讨机器人辅助螺钉置入错误之相关危险因素,在使用机器人的初始阶段,我们建议避免病例存在单个危险因素或多个危险因素的情况,以确保手术的安全性。根据我们的经验,对于肥胖的病人,在术区软组织较厚时,设计钉道时应尽量减少其内倾角度,以降低牵拉组织时对机器人产生的干扰。而对于合并严重椎体旋转的病例,可以考虑多种手段使用Renaissance 脊柱机器人,计算机导航辅助置钉也是较好的选择。对于背部软组织较厚的肥胖病人,切口应适当延长,术中助手应注意保护,确保降低软组织对钉道导向通道的干扰。同时,对于复杂的病例,可以同时使用3D打印导板、术中CT等多种技术,扬长避短,高效利用。
本文仍然具有一定的局限性:①本文为回顾性研究,医生对病例选择具有一定倾向性,尤其是减少了机器人在合并重度椎体旋转及严重畸形的脊柱侧凸病例中的使用,未来仍需要多中心、大样本的前瞻性研究;②本研究纳入了三组不同医生的病例,新技术的使用总是需要在达到稳定状态之前有一个学习曲线,因此我们回顾了以往关于机器人辅助脊柱手术或计算机辅助脊柱手术的研究,大约需要积累5~20 次手术以达到熟练操作[19⁃22]。因此,结合前人和我们的经验,我们剔除了每组最初操作的10 个病例,降低了对结果的人为干扰。
根据本研究的结果,机器人辅助椎弓根螺钉置入是一项较为成熟的技术,我们发现肥胖、骨质疏松、椎体重度旋转和先天性脊柱侧凸是导致机器人辅助螺钉置入错误的独立危险因素。我们建议避免病例存在单个危险因素或多个危险因素的情况,以确保手术的安全性,并帮助增强手术医生的信心。
猜你喜欢
兵器装备工程学报(2021年12期)2022-01-11
今日农业(2021年20期)2021-11-26
国际放射医学核医学杂志(2021年10期)2021-02-28
中国生殖健康(2019年2期)2019-08-23
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
中国当代医药(2015年31期)2015-03-01
中国实用医药(2014年29期)2014-10-23
中国中医药现代远程教育(2014年20期)2014-03-01
中国中医药现代远程教育(2014年14期)2014-03-01
