
永磁同步电动机随机系统有限时间模糊自适应反步控制
2020-12-04 09:34宋思佳刘加朋于金鹏
微电机 2020年10期
宋思佳,刘加朋,于金鹏,程 帅
(青岛大学 自动化学院,山东 青岛266071)
0 引 言
永磁同步电动机(PMSM)凭借其结构简单、效率高、使用寿命长和实用性强等优点已经广泛应用在农业和工业等领域。因PMSM高度非线性、强耦合以及多变量,在实际运用中易受到外部负载扰动、电机参数变化等不确定因素的影响,为更好实现PMSM的位置跟踪控制,需要研究有效的控制策略。近年来,相关研究者针对PMSM非线性系统已经研究了许多有效控制策略,例如滑模控制[1]、直接转矩控制[2]、鲁棒控制[3--4]和反步控制[5-7]等。
但是传统反步方法并没有考虑实际运行中的随机扰动问题,例如:阻尼转矩和磁饱和等可能会引起电动机自感互感、转矩等相关参数发生变化。因此本文使用模糊自适应控制方法处理电机模型中随机非线性函数。
近年来,有限时间方法的应用受到广泛关注。Bernstein[8-9]首先提出了有限时间基于Lyapunov的非线性系统稳定性理论。相比于传统控制方法有限时间方法具有许多优点,例如:缩短动态响应时间、收敛迅速、控制精度高和抗干扰能力强。
基于上述问题,本文针对PMSM随机非线性系统提出了一种基于有限时间的控制方法。本文提出的有限时间模糊反步位置跟踪控制与传统方法相比,主要优点在于(1)考虑了PMSM系统运行过程中的随机干扰,使用模糊逻辑控制处理了电机模型中随机非线性函数,简化了系统的控制器结构。(2)将有限时间控制方法运用在PMSM随机系统当中,提高了系统的收敛、控制精度和抗干扰能力。
1 同步电动机模型
在同步旋转坐标(d-q)下,根据文献[7]PMSM系统的模型可表示为:
(1)
式中,ud,uq表示d,q轴定子电压;id,iq表示电流;ω为转子角速度;θ为转子角度;J为转动惯量;np为极对数;B为摩擦系数;Ld和Lq为d-q坐标系下的定子电感,Rs为定子电阻;TL为负载转矩;Φ为永磁体产生的磁链。为让电机模型能更简便的表示出,新变量定义如下:
(2)
引理1[13]:随机系统可表示为
dx=f(x)dt+h(x)dw
(3)
式中,x∈Rn是系统状态变量,w为独立随机增量过程,f(·):Rn→Rn和h(·):Rn→Rn×r是在x上的局部Lipschitz函数且f(0)=0和h(0)=0。对于V=V(x)∈C2,C2表示复数集,定义差分运算,由微分法则可知:
(4)
考虑到随机扰动的问题,PMSM的模型表示为:
(5)
其中,ψ1、ψ2、ψ3、ψ4表示未知平滑的非线性函数。
引理2[15]:对于随机系统,假设f(0)和h(0)在t上是一致有界的,如果V=V(x)∈C2,a0>0,0<β<1,b0>0.
μ1(x)≤V(x)≤μ2(x)
(6)
对于∀x∈Rn,t>t0,随机非线性系统都是半全局实际有限时间稳定。
2 永磁同步电动机模型的有限时间模糊自适应反步控制器设计
定义系统误差变量如下:

(7)
其中‖Wi‖为向量Wi的范数,已知li、hi和εi为正设计参数,i=1,2,3,4.
Step 1:选取第一个子系统Lyapunov 控制函数
(8)
对式(8)求导,可得
(9)
由杨氏不等式得
(10)

(11)
选取虚拟控制函数和自适应律为
(12)
其中r1,m1为正数,根据式(11)和 式(12)得
(13)
Step 2:选取Lyapunov 控制函数

(14)
TL具有不确定性,存在d>0满足|TL|≤d,由杨氏不等式得
(15)

取虚拟控制函数和自适应律
(17)
其中r2,m2为正数,根据式(16)和 式(17)得
(18)
Step 3:选取Lyapunov 控制函数

(19)
由杨氏不等式得
(20)

取虚拟控制函数和自适应律
(22)
其中r3,m3为正数,根据式(21)和 式(22)得
(23)

(24)
由杨氏不等式得
(25)

(26)
取虚拟控制函数和自适应律
(27)
其中r4,m4为正数,根据式(26)和(27)得
(28)
3 稳定性分析
选取系统的Lyapunov 控制函数V=V4对其求导得
(29)

(30)
i=1,2,3,4.
4 系统仿真实验及结果分析
4.1 仿真实验参数设定
为验证上述控制方法,采用Matlab软件仿真实验分析,电动机参数为:
B=0.001158 Nm/(rad/s),J=0.002 kg·m2,
Ld=0.00977H,Lq=0.00977H,Φ=0.1245H,
Rs=0.68 Ω,np=3.
k1=k2=k3=1000,k4=2000,h3=1,
h1=h2=h4=2,r1=r3=r4=100,r2=1540.
4.2 仿真实验结果分析
仿真结果如图1至图4所示,图1(a)至图4(a)是使用有限时间方法,图1(b)至图4(b)是文献[7]中的传统反步法。
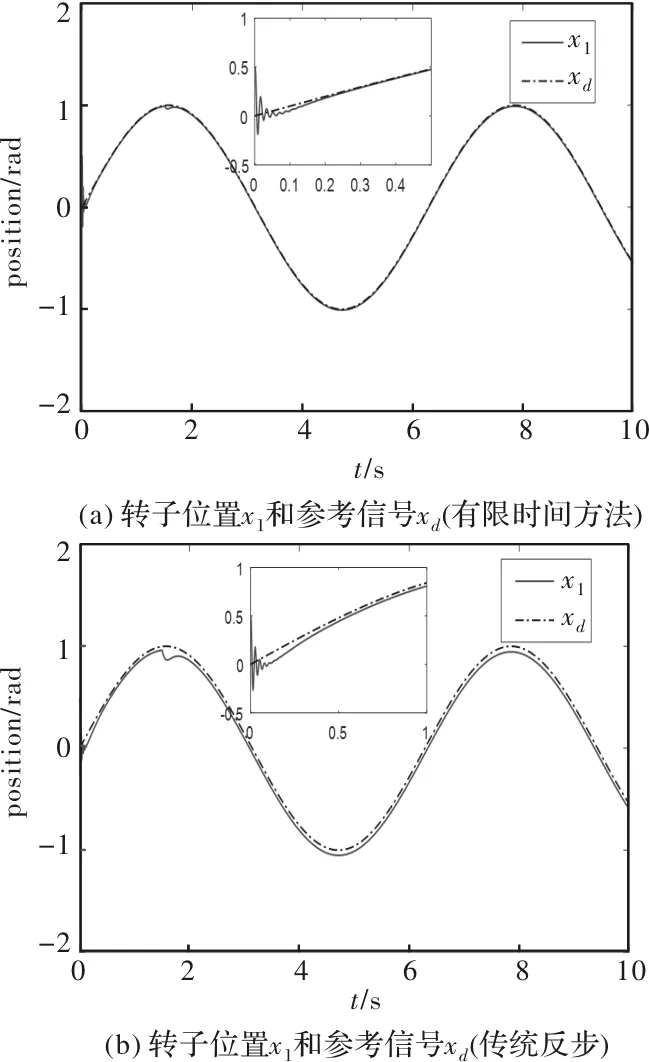
图1 转子位置和参考信号
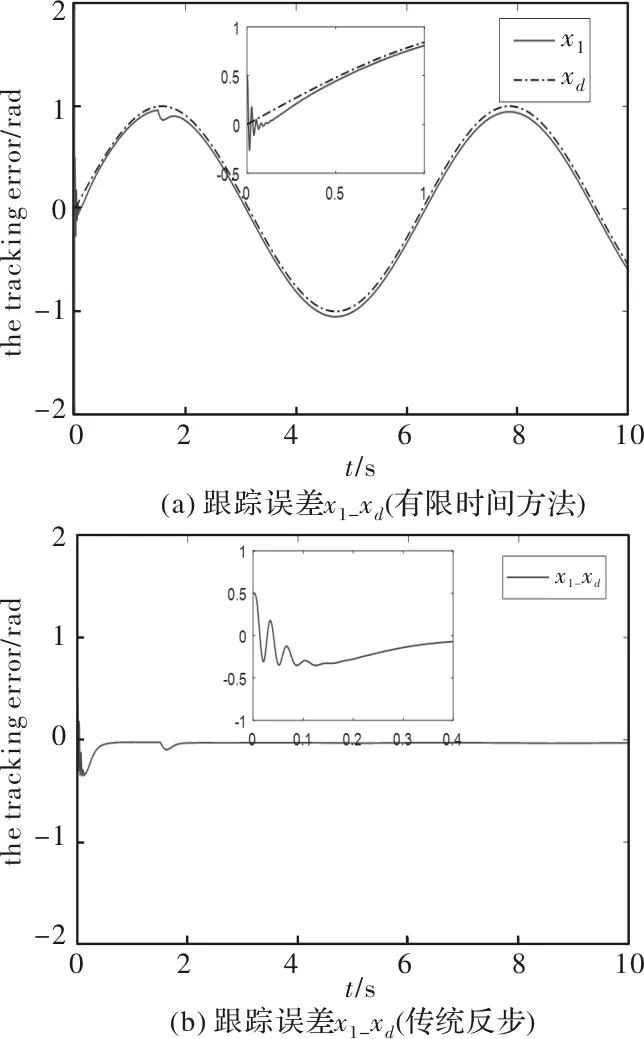
图2 跟踪误差

图3 系统输入uq的轨迹

图4 系统输入ud的轨迹
相比于文献[7]中的传统反步法,加入有限时间控制方法后,系统的收敛速度更快,跟踪效果更好,抗干扰能力更强。
5 结 语
对于存在随机扰动问题的永磁同步电动机,本文结合有限时间控制方法和自适应模糊反步法,设计了一种基于有限时间控制的位置跟踪控制器,实现了PMSM随机非线性控制。仿真结果验证本文所述控制方法能有效的跟踪预期的位置信号。
猜你喜欢
防爆电机(2022年3期)2022-06-17
防爆电机(2022年3期)2022-06-17
防爆电机(2021年5期)2021-11-04
汉语世界(The World of Chinese)(2019年3期)2019-07-01
科学与财富(2017年8期)2017-04-11
中学生数理化·七年级数学人教版(2016年8期)2016-12-07
中学生数理化·七年级数学人教版(2016年7期)2016-12-07
百家讲坛(2016年7期)2016-08-09
汽车电器(2014年8期)2014-02-28
民间文学(2014年1期)2014-02-21
