两台双Y移30°PMSM串联系统的载波调制控制研究
2020-12-04 08:55:20葛宝川闫红广
微电机 2020年10期
王 晶,葛宝川,闫红广
(海军航空大学 航空基础学院,山东 烟台 264001)
0 引 言
舰船电力推进、飞机电力作动、造纸、钢铁、塑料等应用场合,常常需要两台或多台相同或不同运行状态的电机独立运行,譬如卷绕机系统,放卷机电机大部分时间运行在制动发电状态,而收卷机电机则运行在电动状态,如果能够采用单逆变器同时驱动这两台不同状态电机的独立运行,则放卷机电机所发出的能量能直接被收卷机电机所全部或部分地利用,不必经逆变器流通或经逆变器反馈到直流母线的能量大大减小,这样同时驱动这两台电机的同一逆变器的容量就不必过大。因此,需要研究单一逆变器驱动下的多台电机解耦控制的问题[1-3]。
根据多相电机的运行机理,可以通过多电机串联在同一台逆变器上,在同一驱动和控制系统中实现多台多相电机的独立运行。这种新型系统的新颖之处是采用一套DSP平台同时控制一台逆变器驱动的多台串联联结的多相PMSM,在同一变频电源供电下实现多台电机的解耦控制,可以节省驱动控制装置元器件数量、降低系统的成本,有助于减小多相驱动系统的外围电路 以及降低系统的体积、重量[4-5]。本文主要研究一种单逆变器驱动两台双Y移30°PMSM串联系统的载波调制PWM技术(SPWM),包括数学建模、电压补偿以及电压给定值的叠加方法、电流限制方法、直流母线电压的分配方法以及注入零序信号的直流母线电压利用程度的改善策略等,并通过仿真验证可行性。
1 双Y移串联系统的控制技术
单逆变器(VSI)驱动两台双Y移30°PMSM串联系统的定子绕组连接关系如图1所示[6]。
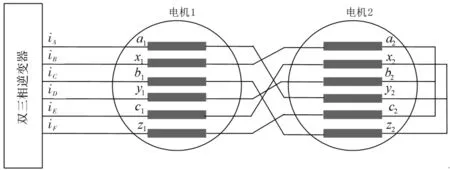
图1 双Y移 PMSM的定子绕组串联关系图
则VSI输出电压与串联电机之间的叠加关系为
(1)
下标1和2分别代表两台串联联结的电机。
VSI输出电流与电机定子电流之间的关系为
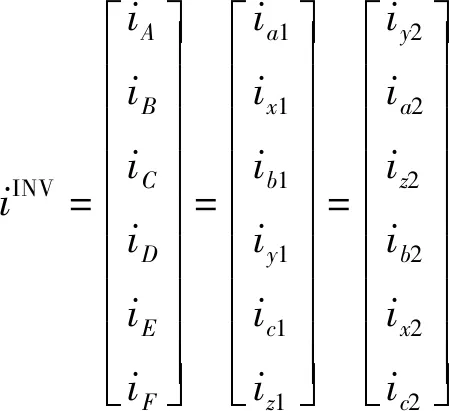
(2)
1.1 基于载波调制PWM的矢量控制系统
id=0矢量控制系统如图2所示。将采样的六相VSI实际电流值,利用式(3)给出的变换矩阵[T]算法分别形成αβ子空间的电流和z1z2子空间的电流,它们分别控制两台串联的PMSM;再根据各自的光电编码盘采样出两台PMSM的位置信号,既可进一步得到各台PMSM的转速采样值,也可进行相应的坐标变换之用,即将PMSM1的αβ子空间的iα、iβ变换为id1、iq1值,将PMSM2的iz1、iz2变换为id2、iq2值,在旋转坐标下分别对两台双Y移30°PMSM按照定子激磁电流分量id=0的控制策略进行转速控制。
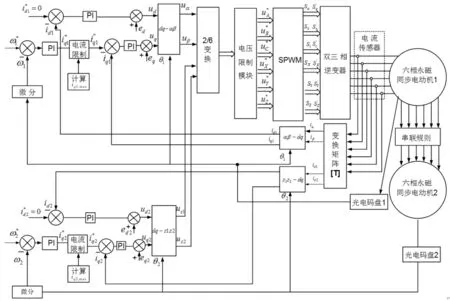
图2 基于载波调制的 矢量控制系统
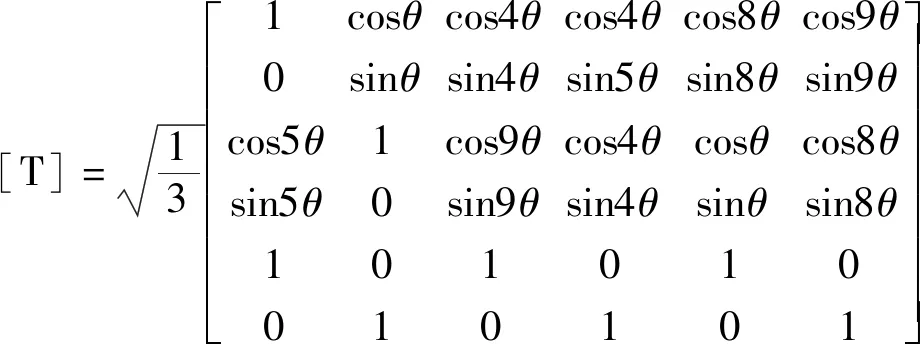
(3)
其中,θ=30°。在形成控制变量时,应该考虑两台串联电机的漏感电压所产生的耦合因素,如图2中PMSM1的ed、eq,PMSM2的ed2、eq2。具体的表达式分别表示为[7]
ed1=-ωr1L1iq1,eq1=ωr1L1id1+ωr1ψf1
(4)
ed2=-ωr2L2iq2,eq2=ωr2L2id2+ωr2ψf2
(5)
这样,用来控制PMSM1的电压给定值为
(6)
用来控制PMSM2的电压给定值为
(7)
1.2 电流限制方法
两台串联PMSM共用同一台逆变器驱动,但是,这两台PMSM为了满足各自的运行条件要求,需要从逆变器电压和电流中各取所需,逆变器输出到负载的最大电流是由所选功率开关器件的特性和冷却条件决定的,两台串联PMSM的电流限制表示为[8]
(8)

每台PMSM的控制电流最大值分别表示如下
(9)
(10)
1.3 SPWM的调制策略
SPWM控制逆变器导通与关断的调制信号与两台串联PMSM的给定电压关系为
(11)
PMSM1和PMSM2的参考相电压分别设定为
(12)
(13)
零序信号zs在-Udc/2-uMIN≤zs≤Udc/2-uMAX范围内变化[8],有:
zs=-0.5(uMAX+uMIN)
(14)
其中,
因此,将zs注入到SPWM的调制信号后,有助于提高直流母线电压利用率:
(15)
2 仿真研究
首先对该串联驱动系统的转速变化解耦控制仿真研究,设串联PMSM的参数为:rs1=rs2=2.875Ω,L1=L2=8.5 mH,ψf1=ψf2=0.175Wb,p1=p2=4,J1=J2=0.0089 kg/m2。
仿真1:PMSM1、PMSM2分别工作在负载转速300 r/min、500 r/min,均带5 Nm的负载,在0.8 s时刻PMSM1从300 r/min反转至-300 r/min。两台电机的运行性能如图3所示。
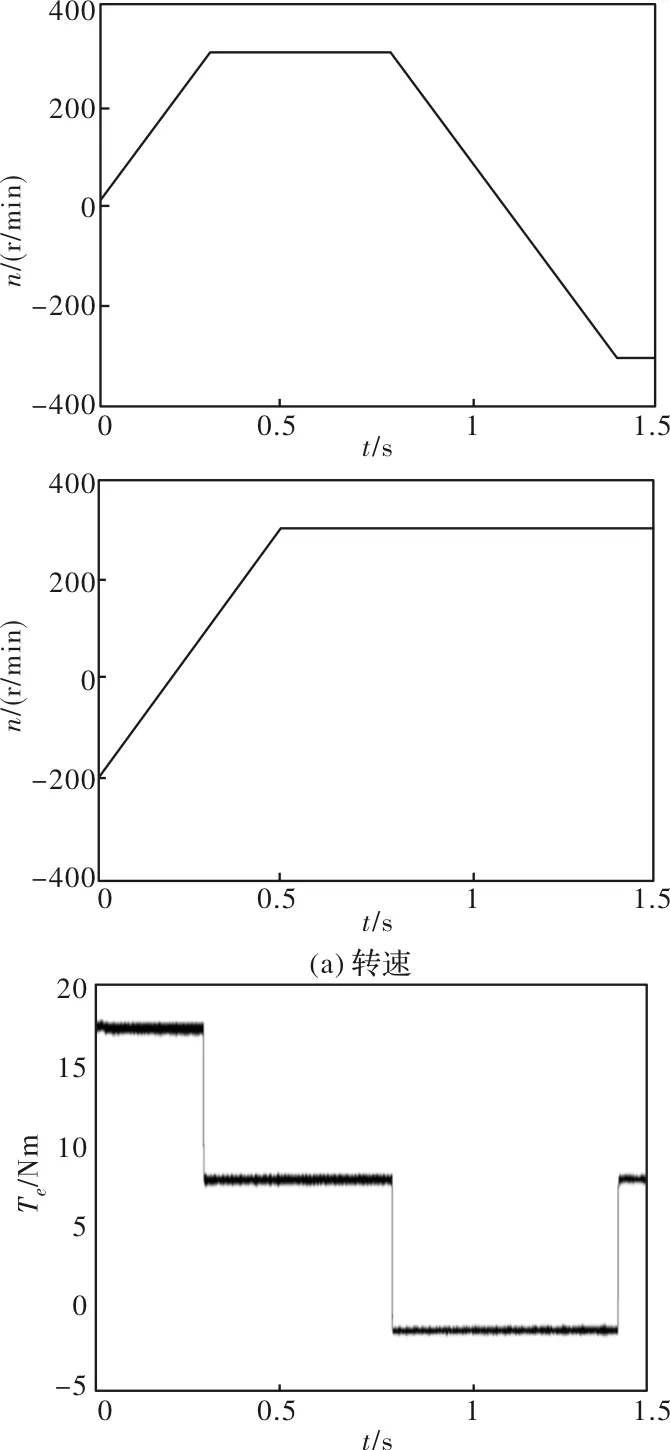
图3 变速运行性能
仿真分析如下:
(1)PMSM1变速过程中,对PMSM2没有任何影响。(2)在转速稳定状态下,电磁转矩与带负载的大小关系一致。(3)由于PMSM1和PMSM2均带负载运行,逆变器输出电流包含了PMSM1和PMSM2的电流,因此,呈现不规则的电流波形。
仿真2:两台电机分别工作空载下,转速分别为400 r/min和200 r/min,在0.5 s对PMSM2加负载8 Nm的阶跃负载力矩,稳定运行后再将负载力矩去掉,仿真结果如图4所示。
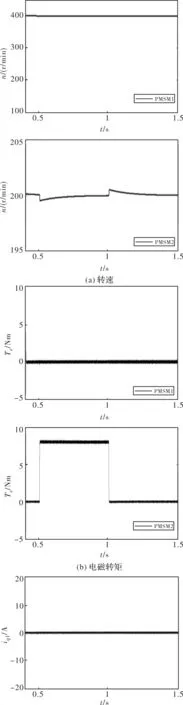
图4 变负载运行性能仿真
通过对仿真结果分析可见:若某一台串联PMSM的负载变化时,其转速会有微小的脉动,并能够快速地恢复到原来设定值,其电磁力矩和力矩电流分量也会产生相应的变化,在一台PMSM的负载力矩变化时,对与其串联的另一台PMSM的转速和电磁力矩均没有产生任何变化,可见两台串联PMSM的运行是独立的。
3 结 语
本文研究了新型的两台双Y移30°PMSM串联系统的载波调制PWM控制技术,包括电压补偿以及电压给定值的叠加方法、电流限制方法以及注入零序信号的直流母线电压利用程度的改善策略等内容。并通过样机的变速、变载仿真进行了可行性验证,证明了在一台PMSM的转速或负载发生变化时,对另一台PMSM的运行没有产生任何变化。
猜你喜欢
故事作文·低年级(2023年11期)2023-12-05 06:39:56
故事作文·低年级(2023年12期)2023-03-24 14:16:52
中国环境监察(2016年7期)2016-10-23 05:36:30
中国现当代社会文化访谈录(2016年0期)2016-09-26 08:46:23
西部广播电视(2015年10期)2016-01-18 04:01:45
电测与仪表(2015年4期)2015-04-12 00:43:06
电测与仪表(2015年5期)2015-04-09 11:30:46
电测与仪表(2014年15期)2014-04-04 12:05:32
华东理工大学学报(自然科学版)(2014年2期)2014-02-27 13:48:49
电机与控制应用(2013年9期)2013-11-21 08:00:04