一种网球陪练机的机构设计
2020-12-01 05:49:14武金亮孙亮波王懿偲许佳敏
机械设计与制造工程 2020年11期
武金亮,孙亮波,王懿偲,许佳敏
(武汉轻工大学机械工程学院,湖北 武汉 430048)
1 现有产品性能分析
网球是一项优美激烈的运动,深受大家的喜爱。随着网球普及至寻常百姓家,人们需要一款陪练机以便在没有同伴的情况下也能享受网球带来的乐趣,此外陪练机还可以用于运动员的日常训练。与此同时,人们还需要一种能够自动捡球的机器,以避免因反复捡球所产生的疲劳。通过市场调研,目前国内外市场上网球发球装置和收球装置的主要产品及其性能分析见表1。
表1 市场现有同类产品
通过分析可知,现有网球发球装置和收球装置主要存在以下问题:1)不能同时改变网球发射的速度和方向;2)普遍体积庞大,较为笨重,不利于携带[5];3)售价太高,不利于普及[6];4)自动化程度不高;5)主流装置一般只有一个功能,只能发射网球或收集网球,很少有既具有发射功能又具有收集功能的机器。
本文将以这5个问题为出发点,设计满足功能要求的网球陪练机。
2 网球陪练机的结构组成
基于以上对市场现有的发射和收集网球装置的性能分析,设计了一款新型网球陪练机。该陪练机可以自主收集网球,收集满20个后,根据初始设置的难度随机发射速度、方向各不相同的网球,且可以边发射边移动,模拟真实对抗场景。储存装置的20个网球发射完以后,重新开始收集网球。
该网球陪练机的机械部分由收集模块、储存和传送模块、推出模块、发射模块和俯仰角调节模块5个部分组成,与功能的对应关系如图1所示。为了合理利用空间、减小机身尺寸,该陪练机采用发射装置在前、储存传送装置在中间、收集装置在后的整体布局,如图2所示。当收集网球时,后部作为“车头”;当发射网球时,前部作为“车头”。陪练机驱动轮为麦克拉姆轮,可以向任意方向移动。

图1 网球陪练机结构组成示意图
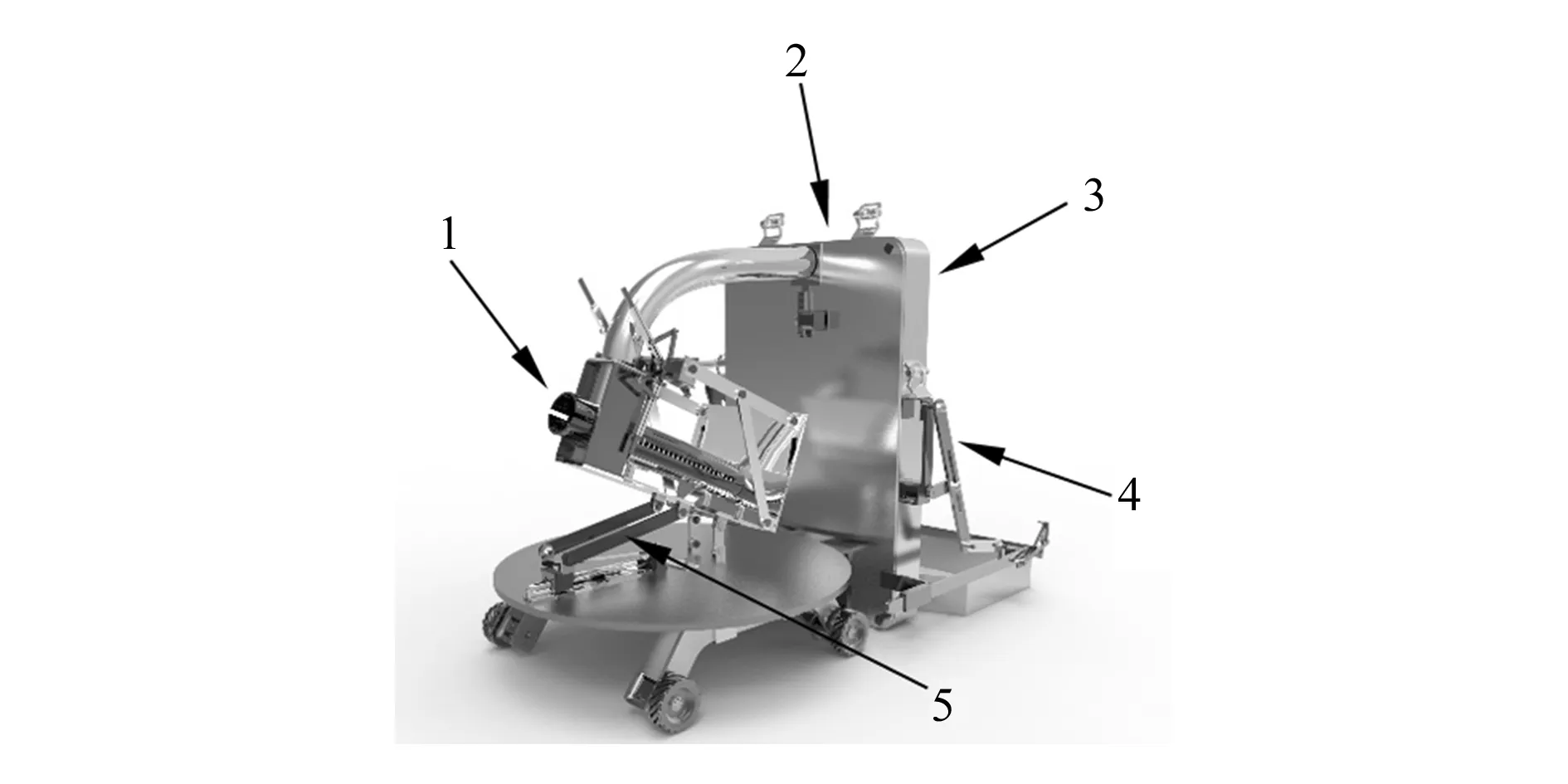
1—发射模块;2—储存和传送模块;3—推出模块;4—收集模块;5—俯仰角调节模块
3 网球陪练机功能实现与尺寸设计
3.1 网球陪练机功能实现
3.1.1收集网球的实现
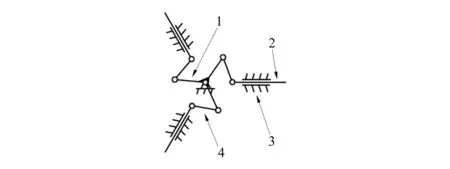
收集模块由组合摆杆机构和连杆翻转机构组成,通过两者的配合形成类似扫帚扫地的轨迹,将球收进收集模块。模块利用了摆杆机构的急回特性,给予球较大的速度,使其进入收集模块的过程更加顺利。
如图3所示,组合摆杆机构的运动流程如下:原动杆4逆时针转动,使杆6向右运动,到右端最大行程后原动杆9顺时针转动,使挡板8由水平变为竖直。杆4继续逆时针转动,使杆6向左运动,此时摆杆机构为急回行程,通过挡板8将网球以较快速度拉进收集装置。然后杆9逆时针转动,使挡板8由竖直回到水平,完成一个运动周期。杆7,8,9,11长度分别为140 mm、50 mm、120 mm、50 mm,此时通过杆9的转动,可以让挡板8在0°到90°之间运动。其三维模型如图4所示。

1—摆杆;2—机架;3—步进电机;4,9—原动杆;5—牵连杆;6—伸出杆;7—连杆;8—挡板;10—步进电机;11—连架杆
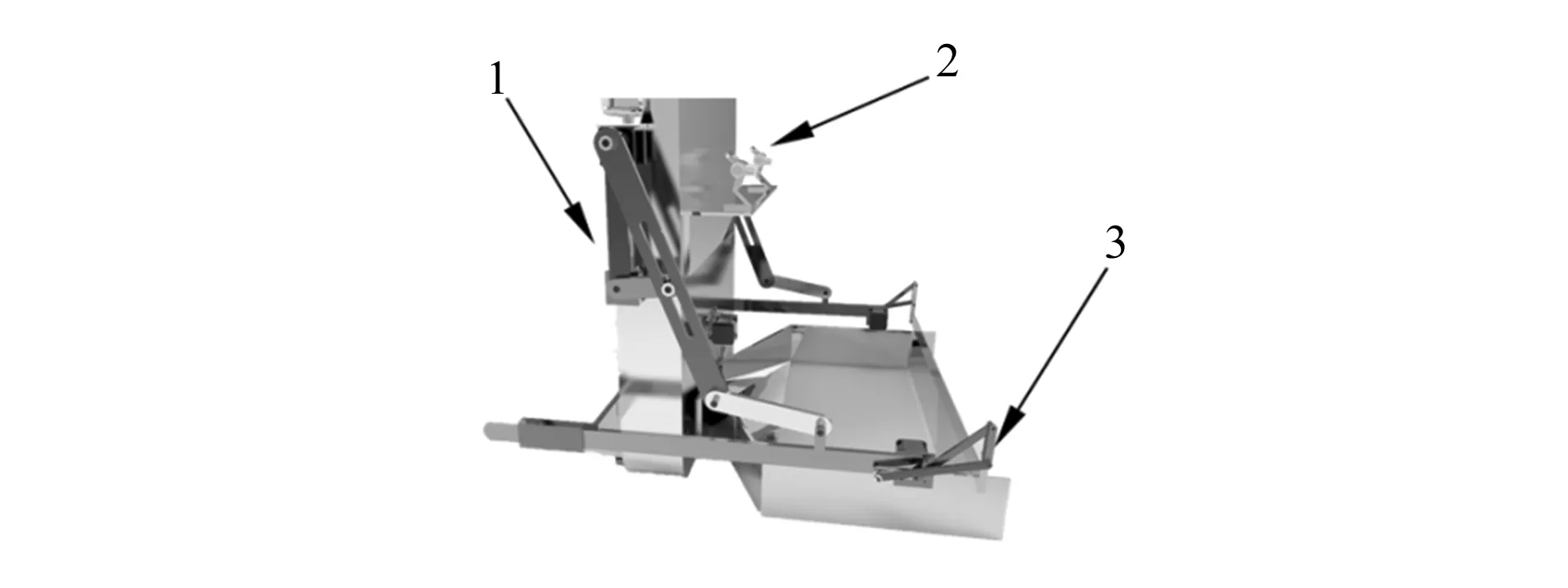
1—摆杆机构;2—视觉识别摄像头;3—翻转机构
3.1.2传送网球的实现
网球陪练机通过链轮链条带动挡板进行网球的传送和收集。收集网球时,如图5(a)所示,控制步进电机1,通过齿轮2、齿条3将集球箱入口的门4打开,集球箱内置有激光传感器。如图5(b)所示,当网球进入集球箱时,激光被挡住,控制器控制链轮5和链条8旋转,使挡板7转动一格,空出位置让下一个网球进入。当收集到20个网球时,入口位置的门4关闭,收球机构拉回至图3(d)所示位置并停止运动,出口6(如图5(c)所示)的门打开,推出机构将网球依次推出至发射管,每推出一个网球挡板7就旋转一格,直至所有网球都被推出。

1—步进电机;2—齿轮;3—齿条;4—门;5—链轮;6—出口;7—挡板;8—链条;9—入口
3.1.3推出网球的实现
如图6所示,步进电机3带动主动杆2转动,通过套筒带动推板1在限位孔里左右运动,从而把球推出。该机构如果安装于收集装置上,更加节省空间。主动杆长92 mm,d为115 mm,当θ∈(30°,105°)时,杆1推程为0~100 mm,可以顺利将网球推出。
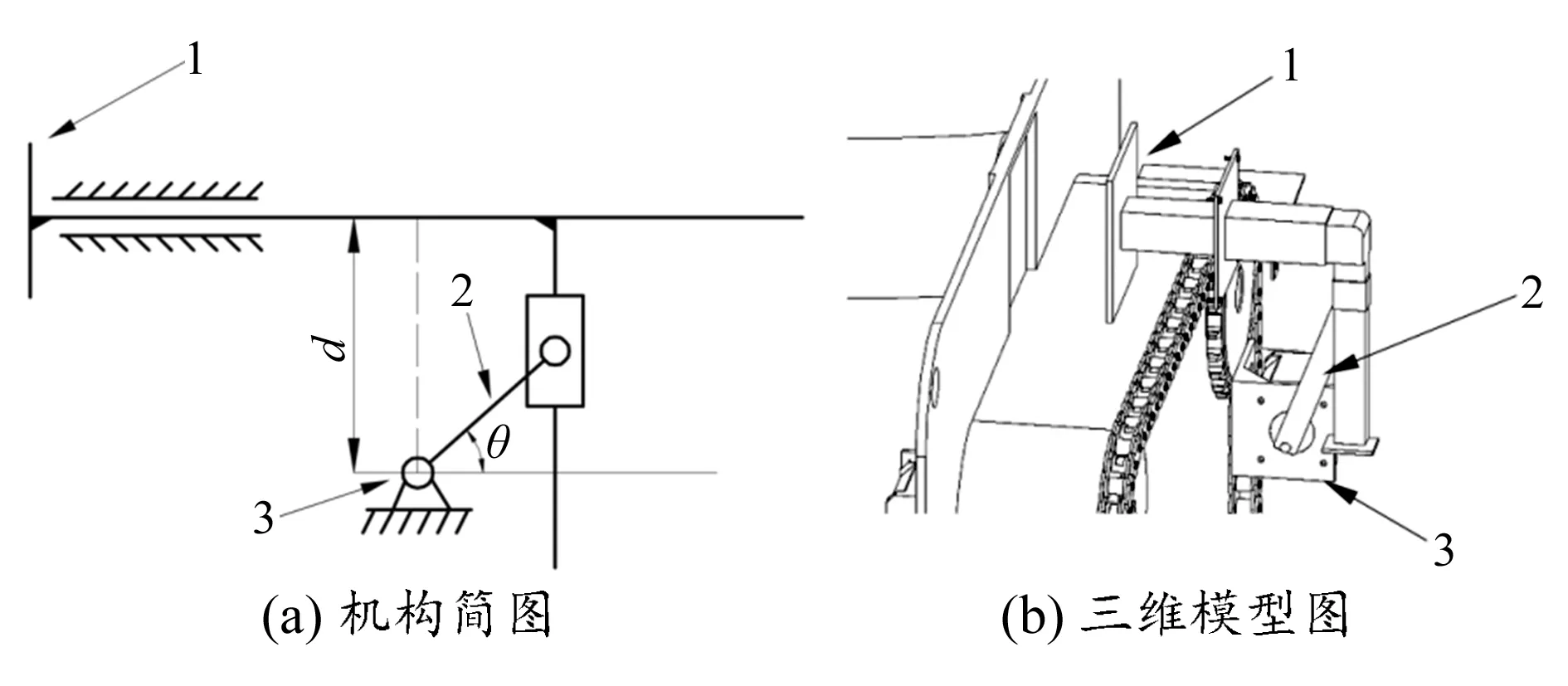
1—步进电机;2—主动件;3—推板
3.1.4发射网球的实现
网球陪练机通过转动杆件,周期性压缩弹簧进行网球的发射;利用“Y” 形机构实现杆件长度的改变,从而发射不同初速度的球。
发射网球的原理如图7所示[7],“Y”形架逆时针旋转,i杆首先与弹簧接触将弹簧压缩,转过120°后i杆与弹簧分离,弹簧释放弹性势能,将网球击出。此时j杆与弹簧接触。如此往复便可不断发球。此种发球原理发出网球的速度与i,j,k杆的长度有关。长度越长,压缩产生的弹性势能越大,发出的球速越高。因此可采用图8所示的“Y”形机构,当原动杆1转动时,可使杆2在套筒3内进出,从而改变杆长。其中杆1长80 mm,杆4长60 mm,杆2长125 mm,套筒3长150 mm,“Y”形架杆长的变化范围为150 ~265 mm。

图7 网球发射原理
该机构控制方式如图9(a)所示,步进电机1控制套筒2,步进电机5控制原动杆3。当步进电机1和5同步(即同时、同方向、同速度)运动时,“Y” 形机构便可如图7所示将网球击出。当步进电机1不动,步进电机5正转或反转时,便可使伸缩杆4伸出或缩进,从而改变杆长,控制网球发射的速度。
1—步进电机;2—主动件;3—推板;4—连杆

1,5—步进电机;2—套筒;3—原动杆;4—伸缩杆
3.1.5调节俯仰角度的实现
网球陪练机通过组合空间曲柄滑块机构与叉架结构,实现俯仰角的改变。网球发射时会有一定的后坐力,该组合结构的使用可以使得整个装置更加稳定。
俯仰角的调节方式有带传动、步进电机直接带动等,但网球发射反作用力较大,因此采用叉架结构使其俯仰,两个杆件支撑使其即使以较大速度发射网球机体也不会剧烈摇晃。叉架结构将底部曲柄滑块机构的直线运动转化为俯仰角度的改变,底部直线运动通过空间曲柄滑块机构实现,如图10所示。
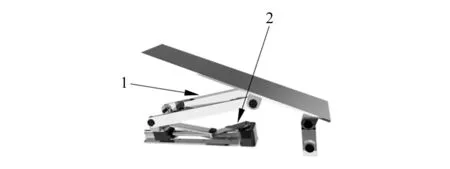
1—叉架结构;2—曲柄滑块机构
3.2 陪练机机身的尺寸设计
网球有效单打场地的标准尺寸是23.77 m(长)×8.23 m(宽)。在球场安装网柱,以两柱中心为测量基准,柱间距是12.80 m,网柱顶端距地面是1.07 m。网球直径为6.541~6.858 cm,质量为56.7~58.5 g。因此本文设计的陪练机的整体尺寸为1 500 mm×850 mm×1 050 mm,与网球场的大小相适应[7-8]。发射管内径为80 mm,外径为90 mm,使网球能够顺利通过而不至于卡住。机身采用半封闭式设计,在起到美观作用的同时,还能协调各功能模块间的空间位置关系[9]。
4 运动学仿真验证
本文主要对网球陪练机的关键部分——收集装置和俯仰装置中的机构进行运动学仿真。
4.1 收集装置中摆杆机构的仿真
本文利用ADAMS软件对摆杆机构(如图3所示)进行仿真,该机构参数为:原动杆4杆长80 mm,机架2长200 mm,摆杆1杆长380 mm,摆杆限位槽长165 mm,牵连杆5杆长150 mm。由仿真结果可知,摆杆运动的角度范围为-23.6°~+23.6°,行程为-150~+150 mm,行程系数比K为1.4。从后处理中可以得到收集装置的位移、速度、加速度曲线,如图11所示,由图可知,机构在急回行程的确拥有较大速度和加速度,可以较快拉回网球,顺利收集;在非急回行程相对较慢,能给予网球充分的时间进入收集装置,以免阻塞入口。

图11 摆杆机构仿真
4.2 俯仰装置的机构仿真
本文利用ADAMS软件对空间曲柄滑块机构(如图10所示)进行仿真,如图12所示,该机构各部分参数为:原动杆2长90 mm,连杆3长190 mm,叉架5长300 mm,杆6(发射台叉架)中a的长度为130 mm,杆2和杆6转动中心竖直方向高度差b为60 mm,水平方向距离c为155 mm。当杆2与水平方向的夹角θ1在0°到180°之间变化时,杆6与水平方向夹角θ2在0°到90°之间变化。从后处理中可以得到其位移、速度、加速度曲线,如图13所示。由图可知,发射管高度的取值范围很宽,可以从很低到很高,说明俯仰角能够满足0°~90°的变化要求;机构加速度在一定值附近微小变化,且变化非常平缓,说明机构整体的稳定性较好。

1—步进电机;2—叉架结构(原动杆);3—连杆;4—滑块;5—叉架;6—发射台叉架
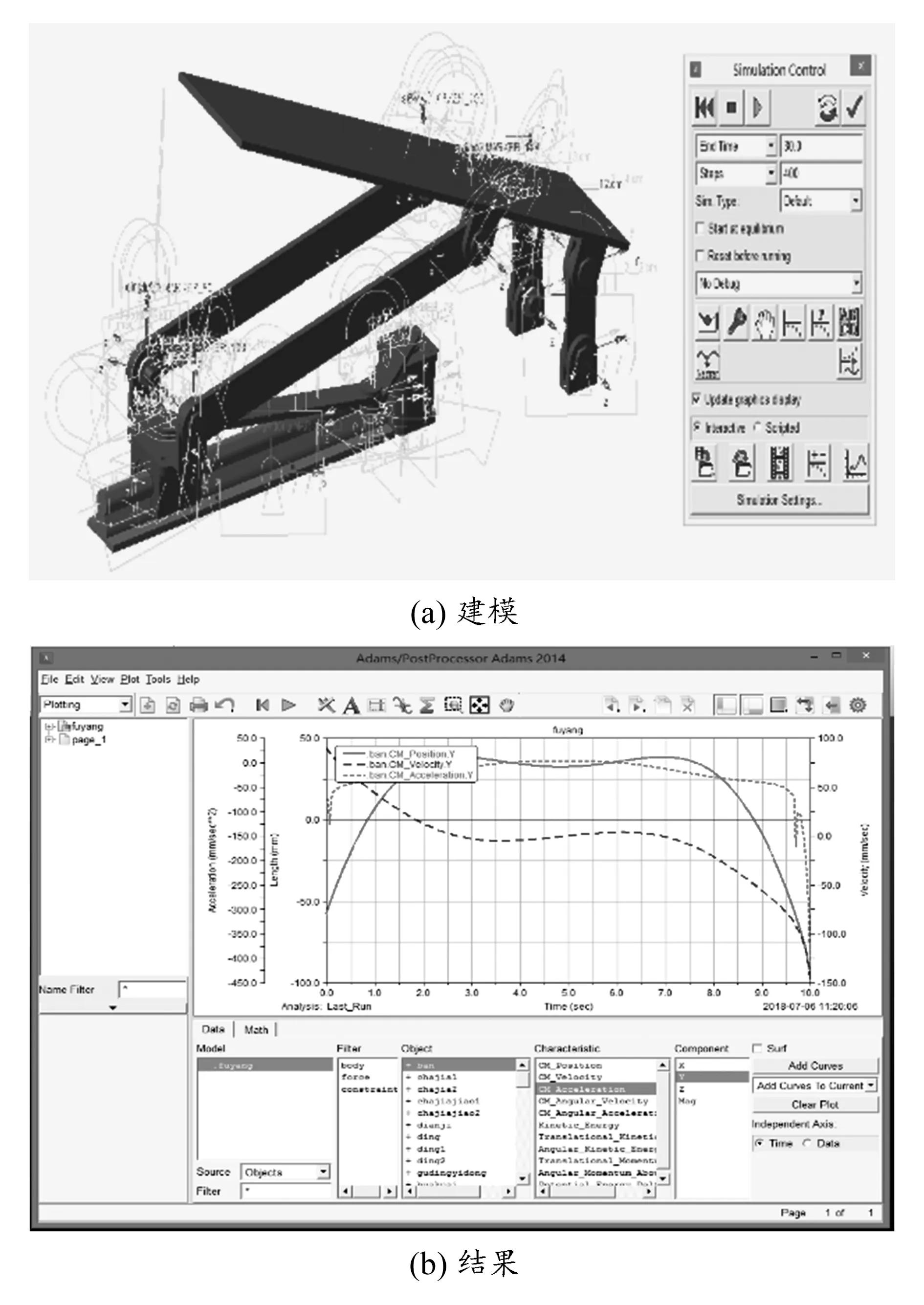
图13 俯仰机构仿真
5 结束语
该网球陪练机集收集网球、发射网球等功能于一体,具有以下优点:
1)提供了一款适合网球爱好者使用的网球收集、储存、发射一体式陪练机。该陪练机操作方便、功能丰富、体积较小,且因结构多为连杆机构,成本较低、运行稳定、便于维护。
2)创新设计的可改变杆长的“Y”形机构,解决了摩擦轮发球不便改变方向、传统弹簧式发球无法改变球速的问题。
3)采用摆杆机构和翻转机构组合而成的收集机构,实现类似扫帚扫地的轨迹,提高了收集效率。
猜你喜欢
沈阳建筑大学学报(自然科学版)(2023年4期)2023-09-13 03:05:12
中学生数理化·自主招生(2023年3期)2023-03-17 02:35:02
电站辅机(2021年4期)2021-03-29 01:16:52
塑料包装(2019年6期)2020-01-15 07:55:48
设备管理与维修(2019年14期)2019-06-16 02:02:32
现代机械(2018年5期)2018-11-13 10:06:16
中国工作犬业(2015年1期)2015-11-13 03:15:30
计算机应用文摘(2010年13期)2010-04-29 00:44:03
环球时报(2009-07-28)2009-07-28 19:40:18
琴童(2009年3期)2009-03-13 08:27:50