
基于嵌入式Linux的驾考培车载评判系统
2020-11-30 09:17孙儒贾晓杰胡占领
汽车与驾驶维修(维修版) 2020年11期
孙儒 贾晓杰 胡占领

摘要:随着计算机信息化的发展,机动车驾驶人考试,简称“驾考”和机动车驾驶人培训,简称“驾培”(两项合称“驾考培”),基本均实现了电子化的考核与评判。目前,这些评判系统应用大多都是基于Windows系统,在汽车上安装相关采集、处理、评判和传输设备来实现的,整体系统实现的集成度不高,安全性、稳定性和功耗都存在着诸多弊端,并且Windows系统使用盗版存在版权纠纷,使用正版需要巨大的费用。基于此,本文主要实现了一套完整的,基于Linux系统的驾考培车载评判系统,可对驾考、驾培行业提供稳定、高效的应用。
关键词:嵌入式Linux;驾考培;驾考;驾培
中图分类号:U471.1文献标识码:A
1相关知识概述
1.1嵌入式Linux系统概述
嵌入式Linux是嵌入式操作系统中的一个新成员,其是将日益流行的Linux操作系统进行裁剪修改,使之能在嵌入式计算机系统上运行的一种操作系统。该系统多运行在ARM架构的计算机上,广泛的应用于工业控制、汽车电子等领域,是目前流行且及具发展潜力的操作系统。
其在实践中表现出了突出的特点和应用优势,具体表现为。
(1)版权费免费。购买费用媒介成本技术支持全世界的自由软件开发者提供支持网络特性免费,而且性能优异,软件移植容易,代码开放,有许多应用软件支持。
(2)应用产品开发周期短,新产品上市迅速。
(3)嵌入式ARM架構的Linux系统整体硬件功耗低于传统的x86架构Windows系统计算机。
(4)Linux系统不易受病毒的攻击。
1.2 Windows系统概述
Windows操作系统是美国微软公司研发的一套操作系统,它问世于1985年,起初仅仅是Microsoft-DOS模拟环境。后续的系统版本由于微软不断的更新升级,不但易用,也成为了当前应用最广泛的操作系统。
其主要是应用于PC端的操作系统,接口较为完善且方便扩展,但随着功能的增加,系统也日益庞大,主要的使用群体是桌面办公计算机领域,在车载低功耗和安防、嵌入式等领域应用较少。
1.3驾考培车载评判系统概述
驾考有三个考核阶段:科目一,驾驶技能理论考试;科目二,场地驾驶技能考试;科目三,道路驾驶技能考试。
驾培,主要是针对驾校科目二和科目三的相关驾驶技能进行培训,培训内容也就是驾考所需要考核的内容。
驾考车载评判系统主要是指机动车驾驶人科目二、科目三考试科目中,车辆所安装的一套硬件加软件的电子化评判系统,是考核驾驶人是否按照相应的考试要求进行驾驶操作的。例如,判断是否按照要求进行倒车入库开启转向灯、变更车道等。这些操作的评判均是由车载安装的硬件设备进行信号的采集、处理以及最终的软件评判。其依照国家标准,有一套完整的考评准则。
驾培车载评判系统主要是以驾驶培训为目的,其实现原理和驾考车载评判系统基本一致。不同的是驾培车载评判系统在使用过程中,软件以语音或其他方式提示驾驶员进行正确的驾驶操作,然后对驾驶过程进行评判的一套系统。其培训标准也遵从国家出台的教学大纲和考试标准。
2系统与硬件、软件设计
2.1系统设计
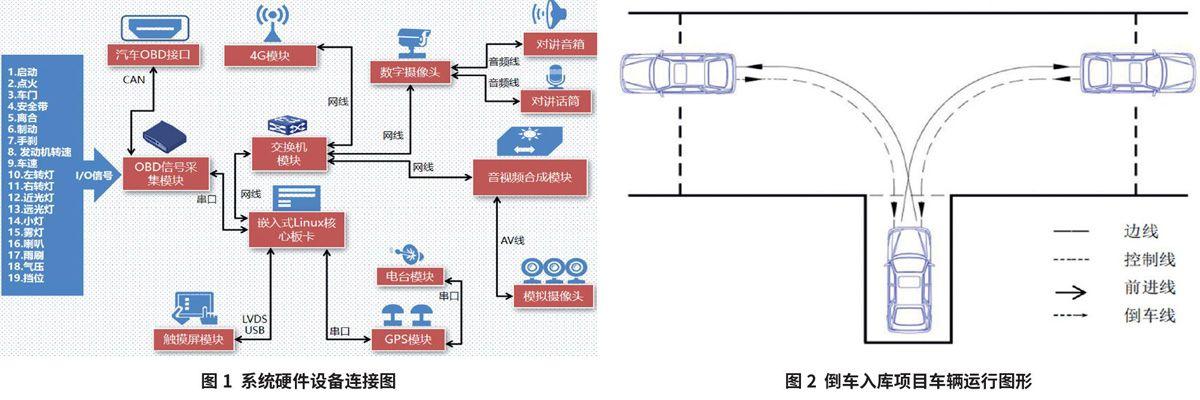
本系统设计采用飞思卡尔1.MX6Q,ARM构架Linux系统核心板卡。以此为依托,将模拟摄像头、数字摄像头、音频合成模块、视频合成模块、GPS模块、电台模块、交换机模块、4G模块(或其他无线WIFI通讯模块)、OBD信号采集模块以及触摸屏模块等设备集成,通过软件对考核过程进行实时评判。
2.2硬件方面设计
Linux系统核心板卡为本系统的主控单元(下称Linux主机),主要通过和各功能模块的交互,完成信号的与处理。各功能模块的功能如下。
(1)模拟摄像头:负责人脸的照片抓取,进行人脸识别。实现身份核验功能和科目三考试中,考试过程的监控。
(2)数字摄像头:负责车内、车外的高清视频采集,保证考试过程的视频监管和实现远程语音对讲功能。
(3)音、视频合成模块:负责科目三考试中,将多路模拟摄像头视频合成为一路进行传输。
(4)GPS模块:负责车辆的位置定位,实现车辆在考核过程中,是否压线、车身出线等判断。
(5)电台模块:负责接收差分基站的差分定位数据,实现车载的高精度差分定位。
(6)4G模块:负责传输考试音视频与数据至远程服务器和远程信息管理。
(7)OBD信号采集模块:通过汽车的OBD接口采集考试、培训过程中所需要的车辆信号或直接连接采集汽车的相关I/O电信号,并传给Linux核心板卡进行处理,例如灯光、挡位、车门、驻车制动或安全带等信号。
(8)触摸屏模块:连接Linux核心板卡,实现车载软件的人机交互与控制。
以上各功能模块通过不同的接口相互连接,协调完成,其整体设备连接结构如图1所示。
2.3软件方面的设计
软件部分按照考试、培训流程主要分为身份认证,考试或培训项目开始、考试或培训项目操作过程评判、考核结束。下面以科目二倒车入库考核项目的软件流程设计为例,其他科目二、科目三考核实现原理与其一致。
2.4倒车入库项目操作要求
从道路一端控制线(倒入车库停车,再前进出库向另一端控制线行驶。待两个前轮触地点均驶过控制线后,倒入车库停车,前进驶出车库,回到起始点(图2)。考试过程中,车辆进退途中不得停车。项目完成时问不得超过3.5 min。
2.5软件评判流程
(1)通过触摸屏或远程命令,在考前或培训前进行身份认证提示,通过摄像头抓拍驾驶员照片,与已经存储在Linux主机内的驾驶员照片对比。对比成功方可开始考试或培训,防止驾驶员上错车或替考。
(2)车辆进入“倒车入库”项目,语音提示项目名称。
(3)GPS模块每200 ms发送一次定位数据给Linux主机,软件通过判断车辆位置与考试、培训场地电子地图的位置关系,来判断车辆所在的项目位置、行车方向、行车轨迹、车轮是否压线以及车身出线。
(4)结合位置关系的判断与车辆信号的判断,是否按照上述“倒车入库”项目操作要求进行驾驶操作。例如操作要求中第一句“从道路一端控制线(两个前轮触地点在控制线以外)”的评判,就是软件判通过车辆GPS模块的定位数据,判断车辆的车轮坐标是否在控制线坐标的外侧,从而实现判断驾驶员的操作是否符合要求。当不符合要求时,软件自动进行相应的扣分和提示。
(5)考试过程中,音、视频全程录像。软件随机抓拍驾駛员的人脸照片进行对比,防止考试中途换人等作弊行为。
(6)本项目操作完毕后,驶出项目,进入下一个项目的操作评判。
(7)所有项目考核评判结束后,给出考试结果或培训结果。通过4G无线模块进行结果传输,实现远程成绩存储。
3整体环境搭建与实现
3.1整体环境搭建
为实现上述车载评判系统的整体功能,需要增加一些硬件环境的搭建。
(1)增加场地差分固定卫星定位基站(下称固定站)和差分数据发射电台,因为想要实现车载端的高精度定位(定位误差±2 cm),必须使用差分定位方式,利用一台在考试或培训场地开阔的高点位置,安装固定站,将固定站接收到的差分数据通过电台以广播的行驶发射出去。而本系统中,车载的电台会接收到此数据给车载端GPS模块,这样就实现了高精度的差分定位。
(2)在远端安装一台服务器或普通台式电脑和一台4G路由器,用来接收车载端通过4G模块发送的数据,实现考试数据的远程存储。
(3)在已经硬化的水泥路场地,按照考试、培训相关标准,绘制考核项目。如上述科目二考试的“倒车入库”等项目,图3为小型车科目二的5项考试科目图形示意图。
(4)按照图3中实际场地的考试、培训项目图形,将项目图形进行电子地图测绘,车辆外形的32个特征点进行测绘,使实际场地、车辆与电子地图、电子车辆模型一一对应(图4)。
至此,就完成了嵌入式Linux的驾考、驾培车载评判系统整体运行环境搭建。
3.2系统落实
系统各模块进行连接,其中,嵌入式Linux核心板、4G模块、网络摄像头以及音视频合成模块为网络设备,需要进行IP地址、子网掩码和网关进行配置。OBD信号采集模块、GPS模块、电台模块为串口通讯设备,需要进行串口号、波特率的设置。
用QT软件制作考试、培训软件的图形界面,将其安装在Linux嵌入式核心板中。以场地驾驶技能考试为例,图5为考核系统主界面,图6为考试、训练软件界面。
4结束语
综上所述,随着电子化驾考、驾培的发展,对评判系统的要求也越来越高,基于Linux系统的驾考培考评系统在设备稳定性、安全性、经济性和功耗等方面的表现都十分出色,对于驾考、驾培行业的发展起到了积极的推进作用,其推广价值很大,应用前景也非常广阔。
