
轮对探伤机器人系统的设计与实现
2020-11-30 09:01李卓
科技风 2020年30期
关键词:机器人
李卓

摘 要:轮对探伤机器人是利用机器人技术解决动车组一级修轮对缺陷的检测问题。采用先进机器人技术、超声波探伤技术,进行轮对探伤机器人系统的建设。完成了动车组在不落轮的条件下对轮对踏面缺陷及轮辋裂纹的一级修检测。实现了轮对缺陷检测的自动化、智能化,以机器人代替传统人工检查及设备检测,实现轮对缺陷传统检测方式的变革。
关键词:机器人;超声波探伤;轮对检测
Abstract:As important parts of the EMU,the operational status of the wheelset has a significant impact on the driving safety of the EMU.With an increasing number of the running EMUs and the continuous improvement of the running speed of the EMU,the defects detection of the wheelset becomes more and more important.In this paper,research is conducted on the combination of the defects detection of the EMUs wheelset and robot technology,robot technology and ultrasonic inspection technology are used to discuss the design and application of flaw detection robots in the inspection of the first-level repair of the wheelset of the EMU,the defects detection of the tread surface and the rim of the wheelset are carried out in the case of non-falling wheelset.By adopting the method of combining robot and ultrasonic flaw detection equipment,the system combines robot technology and ultrasonic inspection technology and uses sensor technology to achieve intelligent positioning and complete the detection of the defects of the tread surface and the rim cracks in the case of non-falling wheelset.
Key words:Wheelset inspection;robot;ultrasonic inspection
轮对检测机器人系统检测内容主要是针对动车组一级修轮对进行检测,包括对踏面缺陷、轮辋裂纹检测,其重点是检查踏面表面(近表面)缺陷。
目前动车组轮对检测的检测存在的问题有:(1)轮对检测设备分散在各个检修规程中,存在分散、孤立的情况,在一级修没有专项检测手段;(2)二级修固定式轮辋轮辐探伤设备检测时间较长,导致动车组在库内滞留过久;(3)现有动车组故障检测机器人采用图像识别技术进行故障判断,无法完成部件结构内部故障的检测;(4)传统探伤设备探伤过程需要拆卸撒砂管、添加磁粉等部件或材料,检修效率低。
针对以上问题,本文对轮对探伤机器人设计进行研究,提出在机器人的基础上加装超声波探伤机等设备,完成在一级修机器人检测项目内对轮对缺陷的检测。
1 系统设计
1.1 总体架构设计
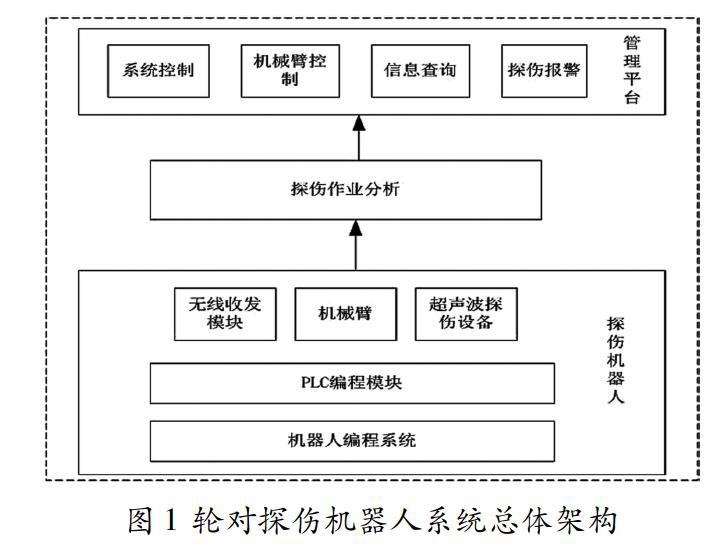
探伤机器人系统是人工智能正在快速发展的一个分支。轮对探伤机器人主要安装在动车段、所检修库轨道桥下的检修沟内,按照轮对检修任务进行自动轮对定位、自动数据采集。探伤作业系统通过PLC控制器下发任务,控制探伤机器人作业启停、并通过超声波探伤设备实时获取轮对缺陷的检测信息,并进行分析、识别、报警,将产生的缺陷信息进行分类,在管理终端进行轮对缺陷信息的报警、展示。
轮对探伤机器人系统。总体架构设计如图所示:
(1)机器人子系统。机器人子系统是利用机器人自动控制技术及PLC控制技术,实现对机器臂、超声波探伤机、传感器等设备的开启、运行、定位、复位等指定操作的载体,是完成轮对信息检测、采集、传输、显示、存储的底层硬件设备。
(2)探伤作业分析子系统。探伤作业分析子系统是将采集回传的轮對超声波信息进行处理、分析、判断、报警的超声波缺陷分析系统。
(3)管理平台。管理平台是对机器人子系统、探伤作业分析子系统进行管理、配置、调试、状态及故障查询、轮对探伤的作业和报警处置的软件管理平台。
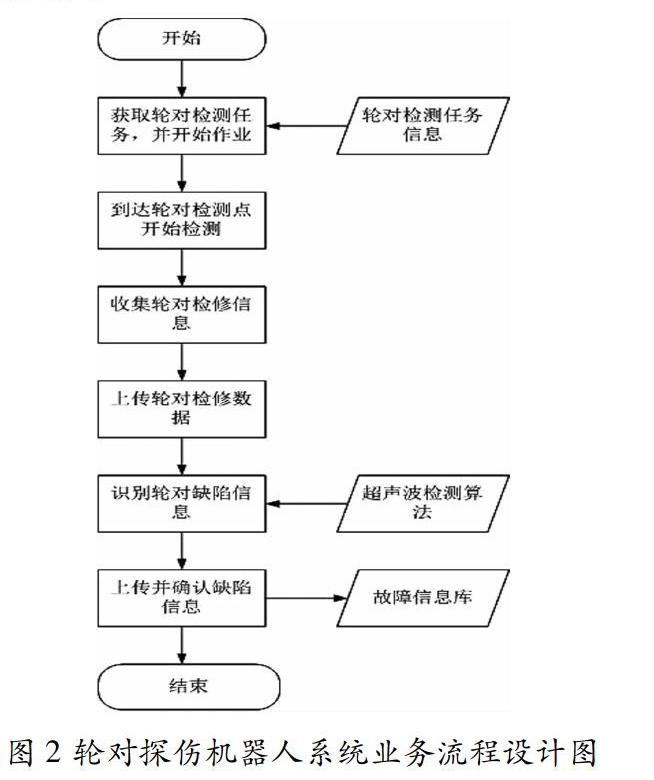
1.2 业务流程设计
在收到检测任务后,启动机器人,自动开始对动车组每个轮对进行定位,并进行逐一检测,收集轮对检测信息,实时将检测结果通过无线方式上传给上位机探伤作业系统进行处理、存储,发现轮对缺陷自动上报至检修作业人员监控终端的软件系统内进行显示,对该轮对缺陷信息由检修作业工人进行确认、复核,如确认则将轮对缺陷信息直接上传至故障数据库服务器进行存储,轮对探伤机器人工作结束。并由检修作业人员对该故障进行及时的处理。主要的业务流程设计如下图所示:
1.3 硬件设计
因机器人走行部在动车组故障检测机器人中完成设计研究,本文就不在探讨,轮对探伤机器人系统硬件主要包括机器臂和超声波探伤机、上位机、中控柜、工控机、服务器等硬件设备,通过完成对所有硬件设备的集成,建立探伤检测系统,其总体物理设备构成如下图3所示:
(1)机器臂。由工业六轴机器臂、伺服控制器、示教机组成,用于承载超声波探伤机完成指定角度的伸缩动作;系统采用6轴机械臂,模拟人手臂操作将超声波探伤机送至轮对检测指定的位置。
(2)超声波探伤机。超声波探伤机是超声波发生和采集装置,可以探测到车轮踏面裂纹和材料缺陷;用于采集轮对的超声波信息。
(3)工作台。工作台是机器人模拟操作单元,承载机器臂、轮对,包含箱体、转台、电机等设备,用于支撑轮对质量,提供轮对选择的动力,用于摸底轮对探伤机器人的工作环境。
(4)中控柜。中控柜是探伤机器人的控制单元,包括上位机、工控机或服务器、PLC控制器、监控终端、无线网络设备、报警灯、状态指示灯等设备或者配件。用于探伤作业分析软件、系统管理平台的部署、安装;探伤报警的显示、处置;狀态显示、声光报警展示等。
1.4 系统功能设计
轮对探伤机器人系统主要功能分为硬件功能和软件功能两部分,硬件功能包括系统设置、机器臂控制,软件功能包括探伤报警、信息查询,如下图所示:
(1)系统设置功能。对轮对探伤机器人系统,进行参数设置:如自动、手动模式;转台参数;探伤设备参数等。
(2)机器臂控制功能。轮对探伤机器人系统主要是指垂直多关节机器人,其结构特点为机构紧凑,动作灵活,工作空间大;能绕过基座周围的一些障碍物;适合电机驱动,关节密封、防尘比较容易。其工作原理是由接收机发出讯号给舵机,经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回讯号,判断是否已经到达定位。通过PLC预制编程,自动控制机器臂运动到指定位置,通过智能探测设备识别轮对指定位置,启动超声波探伤设备进行扫描,并在作业完成后复位机械臂回到初始位置。
(3)探伤报警功能。通过作业分析软件,对实时采集的轮对超声波数据进行分析、判断、如发现轮对缺陷,实时进行声光报警的自动措施,将报警信息实时显示在控制柜监控终端显示屏内。
(4)信息查询功能。信息查询是指对上报的相关故障进行反向查询的功能,可随时调取相关数据进行查询。主要包括:轮对检测超声波数据、自动报警数据、设备状态数据等。
2 核心关键技术
2.1 机器人技术
将机器人技术与轮对探伤的检测内容相结合,解决轮对检测分散孤立的情况;增加了一级修检测手段;缩短了动车组轮对检测在检修规程内的间隔,更及时有效的获得轮对检测的数据;在原有动车组故障检测机器人基础上,实现了对轮对的内部故障检测;提高了轮对检测项目的检修效率。
2.2 涡流超声波探伤技术
传统的磁粉探伤机探伤过程需要拆卸撒砂管部件、添加磁粉材料,检修效率低。涡流探伤无线添加任何材料就能实现轮对的无损探伤。
3 应用总结
本文完成了以轮对探伤机器人代替人工检测作业,及代替传统轮对检测设备作业设计有构想,实现了轮对缺陷检测的自动化、智能化和机器人化,革新了动车组轮对故障原始检测机制和模式;完善了动车组一级修库内作业的检修手段;提升了轮对检测的工作效率;达到了智能化、准确化的技术要求,将机器人引入轮对检测领域,解决了现有技术痛点,检修作业人员可以简单的使用用轮对探伤机器人,只需针对报警信息进行轮对缺陷的复核,不影响动车组检修作业,提高生产效率同时降低检修工人劳动强度。
轮对探伤机器人突破既往的传统思维模式,结合技术创新与模式创新,探索新的技术手段、工作方法以及业务流程的变革方案,在诸多方面带来了新的活力。可减少行车事故的发生,保证运输安全,具有良好的社会效益;自动检测、自动报警的实现可降低人工作业的劳动强度,提高工作效率和工作质量;使系统集检测、监控、管理、决策为一体,使管理向自动化、科学化、信息化迈进;使动车组故障检测的机器人应用成为可能,充分发挥动车组检修的整体水平,带动机器人相关系统应用的不断深入,实现检修能力质的飞跃。
目前轮对探伤机器人受环境及条件影响,还存在检测范围小、检测项目较少的缺点,本人将继续深入轮对探伤机器人的研究,逐步扩展探伤机器人的检测范围及项目,并将探伤机器人与图像故障检测机器人结合作为新的研究方向,实现动车组一级修车底故障的全方位检测。
参考文献:
[1]申樟虹,卢桂英,侯妍君.市域快线车辆轮对检测方案及设备配置研究[J].北京:交通科技与经济,2019.
[2]李加祺.移动式轮辋轮辐探伤系统优化研究与实施[J].北京:铁道车辆,2018.
[3]王娟.轮对磁粉探伤机的应用[J].济南:中国铁道学会材料工业委员会2018年学术交流会论文集,2018.
[4]卞森虎.关于轮对磁粉探伤机励磁线圈无法夹紧的研究分析[J].苏州:科技风,2018.
[5]晏锐.高速动车组走行部检测探伤及动车段(所)检测探伤设备配置的思路[J].北京:铁道车辆,2010.
猜你喜欢
红领巾·萌芽(2022年2期)2022-01-31
学苑创造·A版(2017年9期)2017-09-25
知识就是力量(2017年2期)2017-01-21
快乐作文·低年级(2016年9期)2016-09-30
南风窗(2016年7期)2016-03-31
知识就是力量(2016年2期)2016-02-01
小朋友·快乐手工(2015年11期)2016-01-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
