基于叶墙面积的果树施药量模型设计及试验
2020-11-30 13:54薛秀云许旭锋洪添胜谢家兴陈建泽宋淑然
农业工程学报 2020年2期
薛秀云,许旭锋,李 震,5,洪添胜,谢家兴,5,陈建泽,宋淑然,5
基于叶墙面积的果树施药量模型设计及试验
薛秀云1,2,3,许旭锋1,李 震1,2,3,5,洪添胜2,3,4,谢家兴1,5,陈建泽4,宋淑然1,2,3,5※
(1. 华南农业大学电子工程学院,广州 510642; 2. 国家柑橘产业技术体系机械研究室,广州 510642; 3. 广东省山地果园机械创新工程技术研究中心,广州 510642; 4. 华南农业大学工程学院,广州 510642; 5. 广东省农情信息监测工程技术研究中心,广州 510642)
变量喷雾技术是提高喷雾效果、降低农药使用率的有效手段,而准确的树冠特征参数检测及施药量模型是其关键。为克服果园变量喷雾中果树特征参数检测效率低和对环境要求高的缺陷,该文通过LiDAR(light detection and ranging)检测技术获取表征树冠特征参数的叶墙面积LWA(leaf wall area),并利用图像处理技术计算树冠参数参考值。为了表征树叶密度和LWA对变量喷雾的共同影响效果,研究基于LWA的决策系数LWA,LWA由反映果树冠层分区内点云在水平方向平均深度下的分布密度1和分区内点云分布高度极差占分区高度的比值2加权决定。通过计算垂直方向各分区内决策系数LWA,并代入流量函数可得出基于LWA的施药量计算模型,进一步计算电磁阀PWM占空比并调节水泵和电磁阀的工作状态,使喷头的流量对应冠层各区得到动态调整,实现基于LWA的变量喷雾。利用自制的室外变量喷雾验证装置,进行了多喷头变量喷雾试验,试验结果表明,果树的药液附着率均接近100%,说明基于LWA的变量喷雾模型可实现有效喷雾,与连续喷雾相对比,基于LWA的变量喷雾施药量模型的省药率为68.34%,与纯对靶定量喷雾比,基于LWA的变量喷雾施药量模型的省药率为32.77%。
农药;模型;LiDAR;变量喷雾;决策系数
0 引 言
目前,国际上对变量喷雾在提高药效、减少残留和降低环境污染等方面的前景已形成共识[1],精良的植保机械与施药技术是农药发挥药效的重要手段与保证。随着人们对农产品安全、环境保护意识的增强,精准施药技术装备成为植保领域的重点研究内容与发展方向[2]。因此,国内外对变量喷雾、静电喷雾、防飘喷雾、风送喷雾、仿形喷雾、低空低量航空喷雾、农药喷后回收等技术开展了大量的研究,取得了丰富的研究创新成果。其中,变量喷雾作为一种先进高效的果园施药技术,与连续喷雾相比,可节省农药使用量25%以上[3-6]。
果树特征参数的检测是实现变量喷雾的前提条件,变量喷雾机作业时,通过传感器实时检测果树靶标的高度、宽度、树冠体积等具体特征参数,进而控制压力、流量等喷施系统的工作参数,达到按需施药的目的[7-9]。变量喷雾研究前期主要通过微波探测超声波测距传感器、红外光电传感器或机器视觉系统等来探测靶标是否存在,进行对靶喷雾,降低农药使用量[10-13];后期通过图像识别算法、传感器矩阵或多传感器信息融合等方法,进一步对树冠高度、体积、宽度等参数进行检测,根据冠层特征参数进行变量喷雾,进一步降低了农药使用量,提高农药利用率[14-16]。
翟长远等[17]基于超声传感器搭建了靶标外形轮廓探测试验平台,试验结果显示规则树冠和樱桃树冠体积探测精度分别为92.8%和90.0%。李井祝等[18]分别在启用激光测距传感器研究发现采用对靶喷药功能比未采用对靶喷药功能情况下效率提升34.76%。宋淑然等[19]利用超声波传感器进行对靶喷雾试验,对靶喷雾方式下的雾滴沉积率分别为最高可达86.0%,远高于连续喷雾方式下的雾滴沉积率。李龙龙等[20]对果园仿形变量喷雾与常规风送喷雾性能进行对比试验,仿形变量喷雾机的雾滴飘移分别减少23.2%和42.7%,地面流失分别减少67.4%和58.8%。南玉龙等[21]针对仿形喷雾目标探测,进一步归纳和融合了红外线、超声波、图像和激光等基本技术。
本文基于激光雷达(light detection and ranging,LiDAR)探测树冠参数[22-26],并根据叶墙面积(leaf wall area,LWA)进行施药量模型设计和变量喷雾特性研究。相对于使用超声波传感器、红外传感器等树冠参数检测手段,激光雷达受空气温湿度、光照、风速等外界环境因素的制约较少,稳定性高,也具有更高的检测精度和更快的扫描速度[27-28]。本文研究果树冠层分区内点云在水平方向平均深度下的分布密度和分区内点云分布高度极差占分区高度的比值对变量喷雾的影响效果。与单纯的对靶喷雾相比,该方法根据叶墙面积和树叶密度实时调整喷雾压力、流量等参数,可进一步提高变量喷雾效果、降低农药使用率。
1 试验仪器及方法
1.1 试验仪器与方法
为避免水敏纸因潮湿导致检测误差及避免环境光照影响LiDAR的测量精度,试验在室外风速小于0.2 m/s、环境湿度80%以下、光照度小于80 000 lx条件下进行。LiDAR采用德国SICK公司生产的TIM561型,其角度分辨率0.33°,扫描角度270°,抗环境光强度80 000 lx。
风速通过标智GM8902型风速仪测量,其量程为45 m/s,分辨率为0.01m/s。温湿度通过SW101型温湿度计测量,温度测量范围为−10~50 ℃,测量精度±1 ℃,湿度测量范围为10%~99%,测量精度±5%,湿度分辨率为1%。光照度通过华谊MS6612型光照度计,量程为200 000 lx,分辨率为0.01 lx,精度±3%。
根据中华人民共和国机械行业标准《JB/T 9782-1999(植保机械通用试验方法》[29],选取3棵LWA有差异的仿真树进行多喷头变量喷雾试验。
变量喷雾药液附着率试验现场布置如图1所示,3棵树按照株距为3 m的标准布局,移动平台的中线距离树干1.75 m,搭载喷雾移动平台的轨道长度为10 m。为了减少移动平台颠簸造成的影响,变量喷雾试验在0.33 m/s速度下进行,对应单位距离内的LiDAR扫描次数即扫描密度为45 scans/m。
由于LiDAR扫描角度具有对称性,本文只对树冠的一侧进行变量喷雾特性试验。在进行药液附着率试验时,喷头正对树冠,由上至下分为4层,每层均匀布置3张采样水敏纸,每棵树的采样水敏纸由左至右,再由上到下分别编号为1~12,采样水敏纸的分布图如图2所示。根据标准《JB/T 9782-2014 植保机械通用试验方法》[22],关于喷雾机采用液力喷雾时作业幅度测定,以33%的药液附着率作为喷雾有效性的判定边界。
在完成准备工作后,利用所设计的变量喷雾模型进行1次喷雾有效性试验和3次流量省药率试验,记录试验数据,取3次省药率试验的施药量平均值;每次喷雾有效性试验后,待水敏纸晾干后再取下备用。为了对比变量喷雾模型的省药率,本文在无变量喷雾调节的条件下进行3次连续喷雾,模拟传统的连续淋洗式施药方式,取3次连续喷雾试验施药量的平均值作为变量喷雾省药率分析的参考值。

图1 变量喷雾药液附着率试验现场布置图
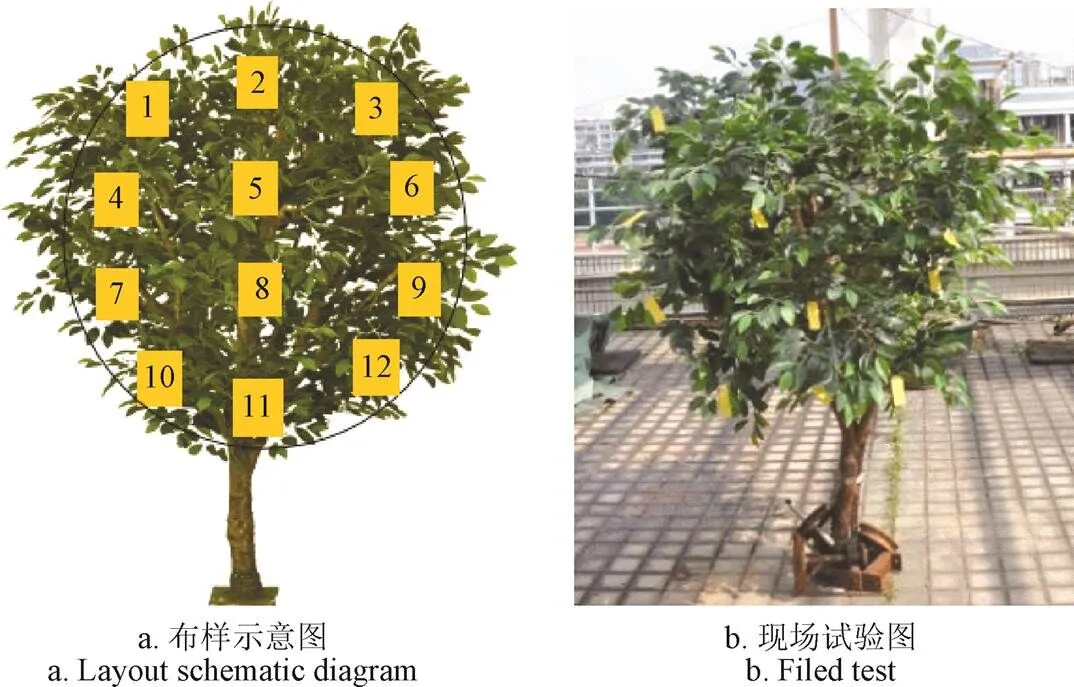
图2 药液附着率试验水敏纸布样图
1.2 LWA参考值计算
准确的树冠特征参数参考值对构建精确的施药量计算模型具有重要意义。为了给基于LiDAR的树冠特征参数检测模型提供准确的参考值,本文根据郑治刚等[30],提出的利用两幅正交图像,根据图中的比例尺,通过描绘树冠轮廓曲线,利用MATLAB获取曲线上若干坐标点,拟合出曲线的函数,通过积分求解得到仿真树的叶墙面积。
如图3所示,试验时将仿真树放置在白色背景墙前方,在树干旁放置高度为50 cm的比例杆,作为尺寸参考物,拍摄正面树冠图像,将图像导入MATLAB,捕获图像中比例杆的2个端点,计算其在图像中的长度并获得比例杆在图像中的尺寸与实物尺寸的比例系数,由此即可通过尺子在图像中的长度计算树冠的尺寸信息;将图像转化为灰度图后,通过最大类间方差法求解灰度图阈值,利用该阈值对灰度图进行二值化处理,标记只包含完整树冠区域的对角点,统计区域内的黑色像素点总数sum;如图4所示将黑色像素点sum构成的面积等效成一个正方形,则可利用式(1)计算叶墙面积LWA。
式中LWA为叶墙面积,cm2;sum为统计区域内的黑色像素点总数;为比例系数。
在3张白纸上分别打印出5 cm×8 cm带框的长方形,将大、中和小3种规格的树叶分别粘贴在长方形框内,利用照相机拍摄包含长方形外框的清晰树叶图像。

图3 比例杆两端点坐标获取示意图

图4 包含完整树冠区域的对角点
图5a为仿真树的原始二值化图像,可见树冠内部较为稀疏,根据本文试验所用仿真柑橘树的设计参数可知,若直接计算该二值化图像的黑色素点对应的面积,则会导致计算值偏小,本文使用半径为2的平坦型圆盘结构元素对原始二值化图像进行disk(2)腐蚀处理再进行LWA计算,腐蚀后的二值化图像如图5b所示,其LWA计算更趋近真值,故本文使用disk(2)腐蚀后的二值化图像计算得到的叶墙面积作为基于LiDAR的LWA检测模型的参考值。
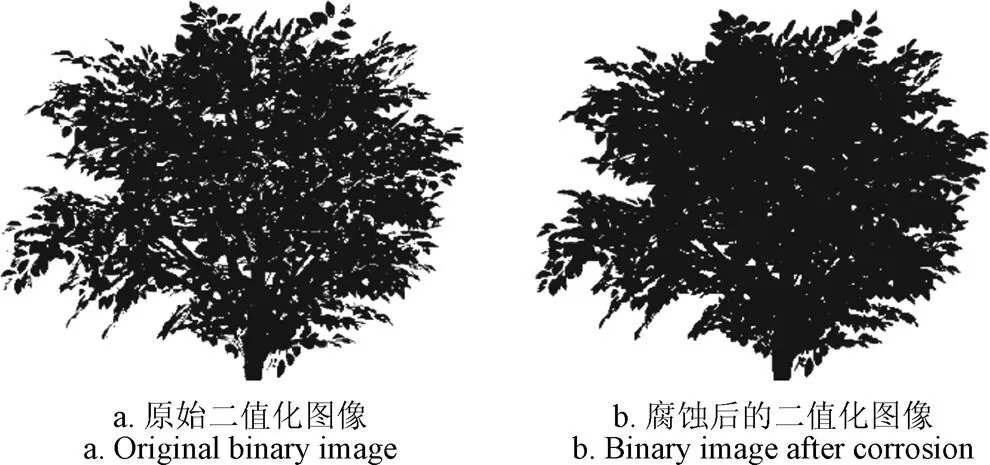
图5 仿真树树冠二值化图像
2 理论依据
利用LiDAR实现变量喷雾主要包含决策环节和执行环节2部分。施药量计算模型主要体现在变量喷雾的决策环节,喷头流量模型主要体现是在变量喷雾的执行环节。其系统的基本工作原理为:LiDAR执行扫描任务并返回点云数据到上位机控制器,控制器分析、处理果树点云数据,得到某种树冠特征参数及表征某种特征参数的对应的决策系数,根据决策系数得到相应的施药量计算模型,计算动态喷施所需的流量。通过PID控制器实时调节水泵的转速来实现压力的稳定,固定电磁阀PWM信号的工作频率,然后开启不同数量的喷头,测量不同PWM占空比下的流量,进而构建不同数量喷头对应的流量模型。当系统进行变量喷雾时,根据喷头的开启数量,调用不同的流量模型,实现流量的精准控制。
2.1 基于LWA的施药量计算模型设计
设计施药量计算模型目的是实时计算所需的药液量。叶墙面积LWA不同,对农药喷施量的需求也不同。计算药液量时,要根据果树高度、冠形和喷雾机的喷头数量设定分区数,考虑树冠在垂直方向不同分区的特征,计算不同分区的决策系数,由式(2)得到所需的动态喷施流量flow。

式中、为喷施流量系数,由喷头流量模型决定,通过标定试验确定和的值分别为0.973 1和0.469 1,为移动平台行驶速度,m/s,为喷雾量调整系数,取值为1。
根据树冠的参考高度con(略大于树冠最大高度),在垂直方向将检测空间均匀分割为4个区域,如图6所示。因树冠在垂直方向不同分区的特征有所差别,故不同分区的决策系数分别计算。以下均以区域Ⅲ为例展开分析计算。
图6中max和min为当前分区高度的最大值和最小值,用于计算当前树冠的分区高度。图6中实心点为第次扫描时检测到的有效点,数量标记为cnt,通过雷达扫描树冠读取该值。空心点为第次扫描时对应叶墙区域内理想条件下布满有效点的数量,其数量标记为base,如式(3)、(4)所知,由雷达扫描有效点云时对应的角度极差计算得到。
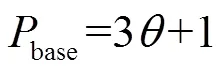
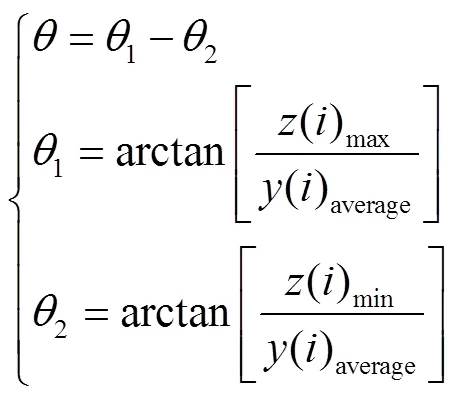
式中()average为第次扫描时所有有效点云数据中的平均值;为第次扫描有效点云对应的角度极差,由1和2两部分构成;(max为第次扫描的有效点中的最大值;(min:第次扫描的有效点中的最大值。
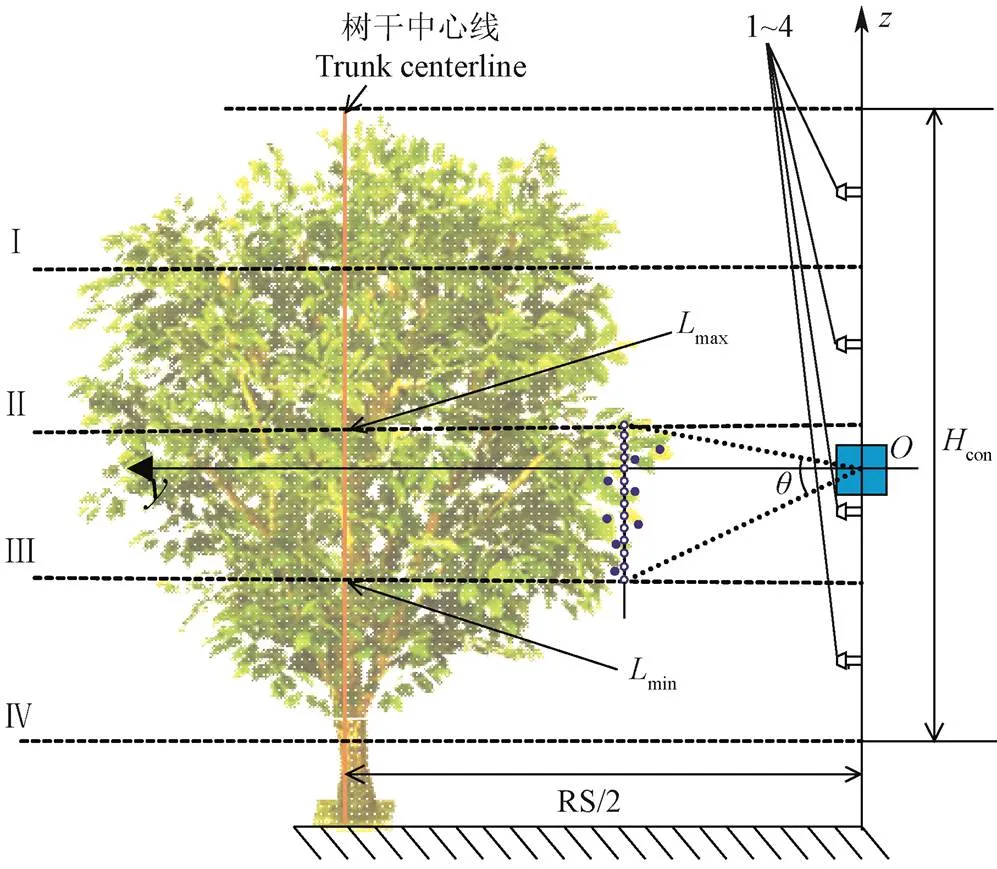
注:Hcon为树冠的参考高度,cm;Lmax和Lmin为当前分区高度的最大值和最小值,cm;实心点为LiDAR检测到的有效点,空心点为该区理想情况下应有的扫描点,RS为果树行距,m;θ为第i次扫描有效点云对应的角度极差;O为坐标原点。Ⅰ~Ⅳ为不同分区;1~4为喷头。
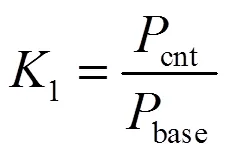
该区域有效点的比例1可用式(5)表示。1反映分区内点云在水平方向上的每一个垂直断面上的分布密度,1越大点云分布密度越大,反之越小。
在点云数据垂直极差相同(即LWA相同)的情况下,点云密度1越大表示树叶越密,对应的喷雾量也应越大。将基于叶墙面积LWA的施药量计算模型的决策系数记为LWA,为了表征树叶密度和叶墙面积对变量喷雾的共同影响效果,LWA由2个特征参数加权决定,其计算模型如式(6)所示。

式(6)中,1如式(5)所述,2为分区内点云分布高度极差占分区高度的比值,反应叶墙面积的实际占比,()max和()min分别是第次扫描时,以LiDAR为原点,经过坐标转换后的最大值和最小值,con为树冠的参考高度。
由以上分析可知,基于树冠LWA的施药量计算模型决策系数LWA有如下特点:
1)包含了树冠树叶疏密信息1和分区内实际叶墙面积占比信息2,比单纯使用整个树冠范围内叶墙面积更能体现变量喷雾的特性;
2)1和2对变量喷雾的影响程度可通过比例系数灵活调整,由于未见有与该系数调节相关的文献可供参考,故将1和2的权重分配各为50%;
3) 需要扫描2次或以上才能计算原始定义的LWA,而在每次LiDAR扫描均可快速计算出决策系数LWA,动态响应特性更好。在获取决策系数LWA后,利用式(1)可得到基于树冠LWA的动态喷施流量。
图7中给出了在垂直方向将检测空间均匀分割为4个区域后对应的LiDAR点云数据的分区识别效果图。由此可根据不同分区点云数据进行相应区域决策系数的计算,从而得到动态喷施流量。
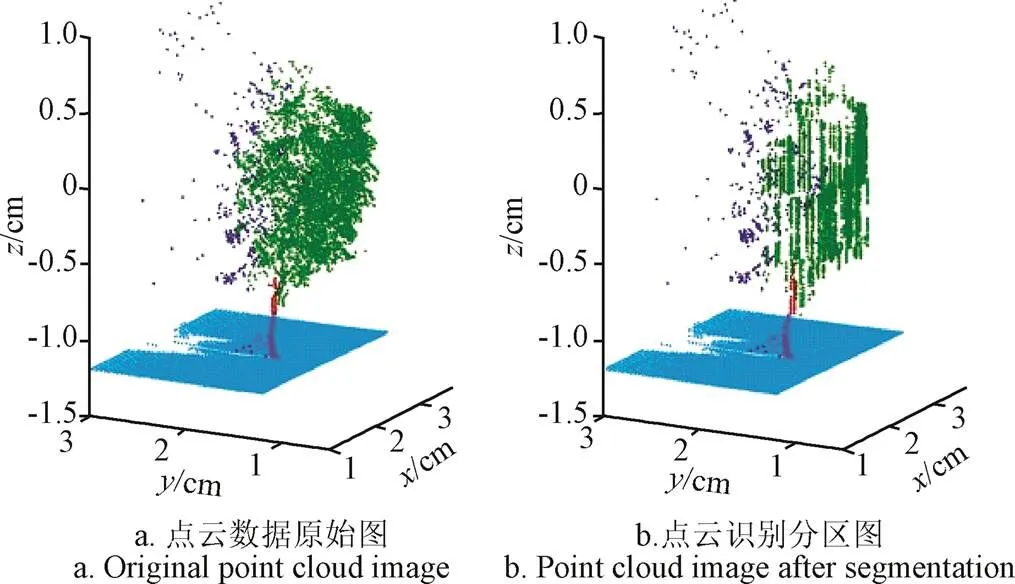
注:x、y、z为不同方向上的距离
2.2 多喷头变量喷雾控制系统设计
根据2.1所述的基于LWA的施药量计算模型,设计了多喷头变量喷雾控制系统,其原理如图8所示。将树冠由上到下分为4个区,系统计算不同分区的决策系数,根据前文式(1)计算各区喷施流量,将该流量值代入多喷头流量模型,计算得到调节电磁阀PWM占空比的控制指令,输出控制指令到电磁阀控制器,实现变量喷雾。
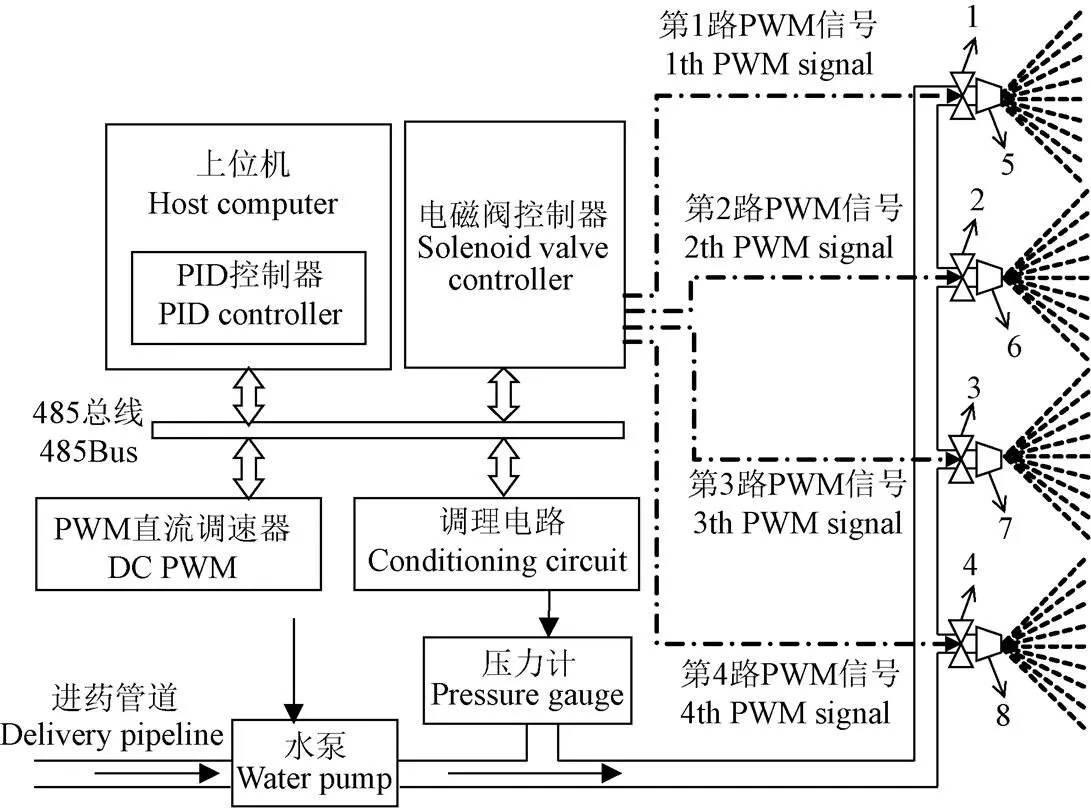
注:1~4为阀门;5~8为喷头。
2.3 喷雾模式设计及采样点布置
为验证基于LWA的变量喷雾效果,喷雾试验设计为基于LWA的变量喷雾、连续喷雾和对靶喷雾3种,对比不同喷雾模式下施药量的差异。
采用基于LWA的果树施药量模型根据树墙面积特征进行变量喷雾,连续喷雾是在喷雾参数恒定的条件下,试验平台的喷嘴在移动过程中无论喷嘴前方是否有靶标都进行持续喷雾,属于不带任何检测措施及判断方法的喷雾,对靶喷雾是通过传感器检测喷嘴对面是否有靶标,如果有靶标则进行喷雾,如果没有靶标,则停止喷雾,喷雾过程中喷雾参数恒定。3种喷雾模式下,均在仿真树的叶片和树之间的空白区域地面上布置若干水敏纸,用来计算雾滴在不同区域的沉积数据。
3 试验结果与分析
由1.1所述试验方法进行连续喷雾与基于LWA的变量喷雾试验后,水敏纸的药液附着采样情况如图9a所示,采样局部及水敏纸染色情况如图9b所示。
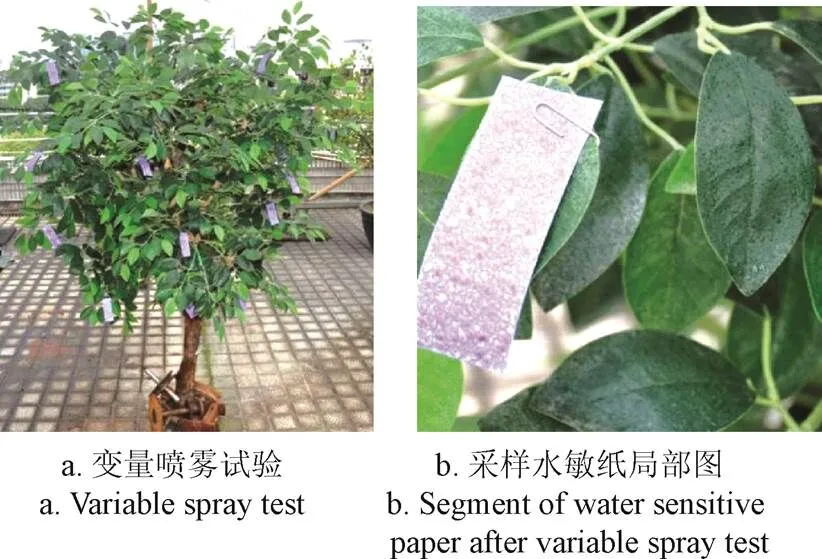
图9 变量喷雾试验水敏纸采样情况
根据标准《JB/T 9782-2014》,药液附着率为采样水敏纸蓝色面积与水敏纸总面积的比值。本研究中大部分采样水敏纸的药液附着率属于分级标准中的第4级(药液附着面积为观察面积的3/4至全部)。对部分药液附着情况无法肉眼识别的水敏纸,采用雾滴特性扫描软件DepositScan进行识别,在非完全浸润的情况下,软件可自动识别所选面积内的总雾滴数、单位面积雾滴数和单位面积的雾滴沉积量。当DepositScan软件识别雾滴数量达到25滴/cm2及以上认为所选区域达到有效覆盖标准。由此可知,用于试验的3棵树的药液附着率均接近100%,均在药液附着率有效性判定界限33%以上,说明基于LWA的变量喷雾模型可实现有效喷雾。
为了进一步进行基于LWA的变量喷雾模型的省药率分析,将其与单纯对靶喷雾的相比,本文结合常规连续喷雾的施药量,通过计算树冠的总冠幅与喷雾试验长度的比值计算施药量,将该计算结果近似等效为纯对靶喷雾的施药量。3棵仿真树的树冠冠幅分别为1.47、1.70、1.60 m,则在轨道长度为10 m的喷雾试验距离下,3棵树的冠幅总长度4.77 m,占喷雾试验距离的47.7%,结合常规连续喷雾的平均施药量,可得到基于靶标存在性检测的对靶喷雾的施药量为常规连续喷雾施药量的47.7%,即1.232 L。经过试验和计算,3种喷雾模式下的施药量如表1所示。
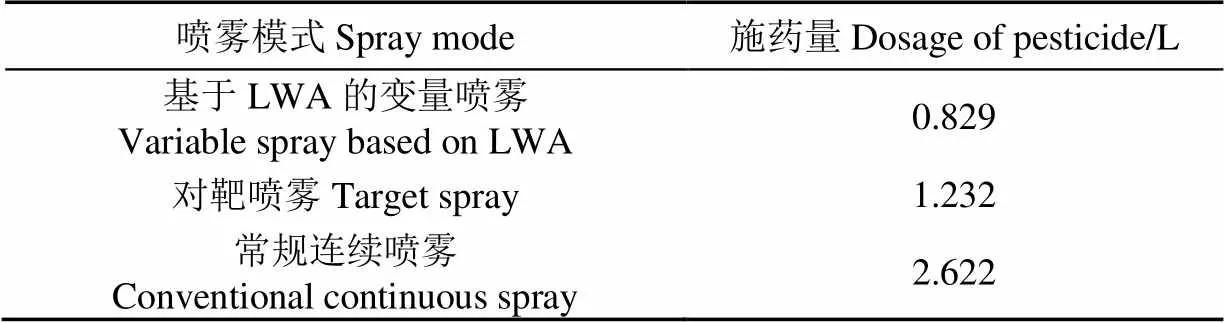
表1 不同喷雾模式下施药量对比
由表1可知,与连续喷雾相对比,基于LWA的变量喷雾模型的省药率为68.34%,与纯对靶喷雾比,基于LWA的变量喷雾模型的省药率为32.77%。数据表明,在保证喷雾质量的前提下,基于LWA的变量喷雾模型达到了节省药液量的目的。
4 结 论
本文利用LiDAR检测技术,研究了基于LWA的树冠特征参数检测模型、施药量计算模型、多喷头流量模型。利用自制的室内变量喷雾验证装置和室外试验平台,进行了多喷头变量喷雾试验,最终完成了基于LWA的变量喷雾系统的研制。
1)为实现精准的变量喷雾,研究并分析了用决策系数表征树冠特征参数及树冠垂直方向分区计算施药量的方法,设计了基于决策系数的施药量计算模型。
2)提出了利用图像处理技术计算树冠参数参考值的计算方法。使用2幅正交投影图像,通过获取图像比例尺像素宽度和捕获图像的4组轮廓坐标点,采用平坦型圆盘结构腐蚀的二值化图像实现了LWA参考值的计算。
3)分析了基于LWA的变量喷雾模型的省药率,试验结果表明,在保证喷雾质量的前提下,与连续喷雾和纯对靶喷雾相比,基于LWA的变量喷雾模型的省药率分别为68.34%和32.77%,省药效果显著。
雾滴沉积量试验可直接说明不同喷雾模式下施药量的多少以及省药的程度,后续将进一步研究基于冠层体积、叶面积密度、叶面积指数等理论的施药模型,通过雾滴沉积量等方法直接计算各种施药模型的省药率等参数。
[1]邱白晶,闫润,马靖,等. 变量喷雾技术研究进展分析[J]. 农业机械学报,2015,46(3):59-72.
Qiu Baijing, Yan Run, Ma Jing, et al. Research progress analysis of variable rate sprayer technology[J]. Transactions of the Chinese Society for Agricultural Machinery, 2015, 46(3): 59-72. (in Chinese with English abstract)
[2]何雄奎. 植保精准施药技术装备[J]. 农业工程技术,2017,37(30):22-26.
He Xiongkui. Precision spraying equipment for plant protection[J]. Agricultural Engineering Technology, 2017, 37(30): 22-26. (in Chinese with English abstract)
[3]Feng K, Pierce F J, Walsh D B, et al. An automated trailer sprayer system for targeted control of cutworm in vineyards[J]. American Society of Agricultural and Biological Engineers, 2011, 54(4): 1511-1519.
[4]Stajnko D, Berk P, Lešnik M, et al. Programmable ultrasonic sensing system for targeted spraying in orchards[J]. Sensors, 2012, 12(12): 15500-15519.
[5]金鑫,董祥,杨学军,等. 3WGZ-500型喷雾机对靶喷雾系统设计与试验[J]. 农业机械学报,2016,47(7):21-27.
Jin Xin, Dong Xiang, Yang Xuejun, et al. Design and experiment of target spraying system of 3WGZ-500 sprayer[J]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(7): 21-27. (in Chinese with English abstract)
[6]王万章,洪添胜,李捷,等. 果树农药精确喷雾技术[J]. 农业工程学报,2004,20(6):98-101.
Wang Wanzhang, Hong Tiansheng, Li Jie, et al. Review of the pesticide precision orchard spraying technologies[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2004, 20(6): 98-101. (in Chinese with English abstract)
[7]宋淑然,洪添胜,孙道宗,等. 风机电源频率对风送式喷雾机喷雾沉积的影响[J]. 农业工程学报,2011,27(1):153-159.
Song Shuran, Hong Tiansheng, Sun Daozong, et al. Effect of fan power supply frequency on deposition of air-assisted sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2011, 27(1): 153-159. (in Chinese with English abstract)
[8]王利霞,张书慧,马成林,等. 基于ARM的变量喷药控制系统设计[J]. 农业工程学报,2010,26(4):113-118.
Wang Lixia, Zhang Shuhui, Ma Chenglin, et al. Design of variable spraying system based on ARM[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2010, 26(4): 113-118. (in Chinese with English abstract)
[9]夏伟. 激光传感器三维靶标检测系统的设计与研究[D]. 镇江:江苏大学,2016.
Xia Wei. Development and Research of 3D Target Detection System Based on Laser Scanning Sensor[D]. Zhenjiang: Jiangsu University, 2016. (in Chinese with English abstract)
[10]陈志刚,王玉光,杜彦生,等. 精确对靶喷雾施药的靶标微波探测试验[J]. 排灌机械工程学报,2010,28(4):364-368.
Chen Zhigang, Wang Yuguang, Du Yansheng, et al. Microwave target detecting experiment for precise pesticide spraying[J]. Journal of Drainage and Irrigation Machinery Engineering, 2010, 28(4): 364-368. (in Chinese with English abstract)
[11]何雄奎,严苛荣,储金宇,等. 果园自动对靶静电喷雾机设计与试验研究[J]. 农业工程学报,2003,19(6):78-80.
He Xiongkui, Yan Kerong, Chu Jingyu, et al. Design and testing of the automatic target detecting, electrostatic, air assisted, orchard sprayer[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2003, 19(6): 78-80. (in Chinese with English abstract)
[12]邓巍,何雄奎,张录达,等. 自动对靶喷雾靶标红外探测研究[J]. 光谱学与光谱分析,2008,28(10):2285-2289.
Deng Wei, He Xiongkui, Zhang Luda, et al. Target infrared detection in target spray[J]. Spectroscopy and Spectral Analysis, 2008, 28(10): 2285-2289. (in Chinese with English abstract)
[13]邹建军,曾爱军,何雄奎,等. 果园自动对靶喷雾机红外探测控制系统的研制[J]. 农业工程学报,2007,23(1):129-132.
Zou Jianjun, Zeng Aijun, He Xiongkui, et al. Research and development of infrared detection system for automatic target sprayer used in orchard[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2007, 23(1): 129-132. (in Chinese with English abstract)
[14]王林惠,甘海明,岳学军,等. 基于图像识别的无人机精准喷雾控制系统的研究[J]. 华南农业大学学报,2016,37(6):23-30.
Wang Linhui, Gan Haiming, Yue Xuejun, et al. Design of a precision spraying control system with unmanned aerial vehicle based on image recognition[J]. Journal of South China Agricultural University, 2016, 37(6): 23-30. (in Chinese with English abstract)
[15]刘理民,王金宇,毛文华,等. 基于传感器融合阵列的果树冠层信息采集方法[J]. 农业机械学报,2018,49(S1):347-353,359.
Liu Limin, Wang Jinyu, Mao Wenhua, et al. Canopy information acquisition method of fruit trees based on fused sensor array[J]. Transactions of the Chinese Society for Agricultural Machinery, 2018, 49(S1): 347-353, 359. (in Chinese with English abstract)
[16]林怡飞,王库,候天星,等. 篱架型作物高效施药技术自适应控制系统的研究与实现[J]. 中国农业大学学报,2010,15(6):108-114.
Lin Yifei, Wang Ku, Hou Tianxing, et al. Implementation of a self-adaptive control system for highly-effective application of trellised crops[J]. Journal of China Agricultural University, 2010, 15(6): 108-114. (in Chinese with English abstract)
[17]翟长远,赵春江,王秀,等. 树型喷洒靶标外形轮廓探测方法[J]. 农业工程学报,2010,26(12):173-177.
Zhai Changyuan, Zhao Chunjiang, Wang Xiu, et al. Probing method of tree spray target profile[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2010, 26(12): 173-177. (in Chinese with English abstract)
[18]李井祝,朱凤武. 基于PLC自动对靶喷雾控制系统的设计与试验[J]. 中国农机化学报,2017,38(8):55-58.
Li Jingzhu, Zhu Fengwu. Design and experiment of automatic targeting spraying control system based on PLC[J]. Journal of Chinese Agricultural Mechanization, 2017, 38(8): 55-58. (in Chinese with English abstract)
[19]宋淑然,陈建泽,洪添胜,等. 果园柔性对靶喷雾装置设计与试验[J]. 农业工程学报,2015,31(10):57-63.
Song Shuran, Chen Jianze, Hong Tiansheng, et al. Design and experiment of orchard flexible targeted spray device[J].Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2015, 31(10): 57-63. (in Chinese with English abstract)
[20]李龙龙,何雄奎,宋坚利,等. 果园仿形变量喷雾与常规风送喷雾性能对比试验[J]. 农业工程学报,2017,33(16):56-63.
Li Longlong, He Xiongkui, Song Jianli, et al. Comparative experiment on profile variable rate spray and conventional air assisted spray in orchards[J]. Transactions of the Chinese Society of Agricultural Engineering(Transactions of the CSAE), 2017, 33(16): 56-63. (in Chinese with English abstract)
[21]南玉龙,张慧春,徐幼林,等. 农林仿形对靶喷雾及其控制技术研究进展[J]. 世界林业研究,2018,31(4):54-58.
Nan Yulong, Zhang Huichun, Xu Youlin, et al. Research progress on profiling target spray and its control technology in agriculture and forestry[J]. World Forestry Research, 2018, 31(4): 54-58. (in Chinese with English abstract)
[22]刘慧,李宁,沈跃,等. 模拟复杂地形的喷雾靶标激光检测与三维重构[J]. 农业工程学报,2016,32(18):84-91
Liu Hui, Li Ning, Shen Yue, et al. Spray target laser scanning detection and three-dimensional reconstruction under simulated complex terrain[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(18): 84-91. (in Chinese with English abstract)
[23]牛润新,李成平,徐照胜,等. 一种基于激光雷达点云技术的植物叶面积指数测定方法:CN104457626B [P]. 2015-03-25.
[24]徐伟恒,冯仲科,苏志芳,等. 一种基于三维激光点云数据的单木树冠投影面积和树冠体积自动提取算法[J]. 光谱学与光谱分析,2014,34(2):465-471.
Xu Weiheng, Feng Zhongke, Su Zhifang, et al. An automatic extraction algorithm for individual tree crown projection area and volume based on 3D point cloud data[J]. Spectroscopy and Spectral Analysis, 2014, 34(2): 465-471. (in Chinese with English abstract)
[25]Arnó J, Escolà A, Vallès J M, et al. Leaf area index estimation in vineyards using a ground-based LiDAR scanner[J]. Precision Agriculture, 2013, 14(3): 290-306.
[26]Bietresato M, Carabin G, Vidoni R, et al. Evaluation of a LiDAR-based 3D-stereoscopic vision system for crop-monitoring applications[J]. Computers and Electronics in Agriculture, 2016, 124: 1-13.
[27]刘慧,李宁,沈跃,等. 融合激光三维探测与IMU姿态角实时矫正的喷雾靶标检测[J]. 农业工程学报,2017,33(15):88-97.
Liu Hui, Li Ning, Shen Yue, et al. Spray target detection based on laser scanning sensor and real-time correction of IMU attitude angle[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(15): 88-97. (in Chinese with English abstract)
[28]刘慧,夏伟,沈跃,等. 基于实时传感器的精密变量喷雾发展概况[J]. 中国农机化学报,2016,37(3):238-244,260.
Liu Hui, Xia Wei, Shen Yue, et al. Development overview of precision variable spraying based on real-time sensor technology[J]. Journal of Chinese Agricultural Mechanization, 2016, 37(3): 238-244, 260. (in Chinese with English abstract)
[29]中华人民共和国工业和信息化部. JB 9782-2014植物保护机械通用试验方法[S]. 北京:中国质检出版社,2014.
[30]郑治刚,李怀玉,廖雅萍. 树冠空间体积的计算方法[J]. 林业资源管理,1986(1):35-40.
Zheng Zhigang, Li Huaiyu, Liao Yaping. Calculation method of canopy space volume Forest[J]. Resources Management, 1986(1): 35-40. (in Chinese with English abstract)
Design and test of variable spray model based on leaf wall area in orchards
Xue Xiuyun1,2,3, Xu Xufeng1, Li Zhen1,2,3,5, Hong Tiansheng2,3,4, Xie Jiaxing1,5, Chen Jianze4, Song Shuran1,2,3,5※
(1.,,510642,; 2.510642,; 3.510642,; 4.510642,; 5.510642,)
Variable spray technology is an effective means to improve the spray effect and save pesticide. The accurate canopy characteristic parameter detection and application rate model are the decisive stages for precise variable sprays. In order to solve the problems of low efficiency and high environmental requirements in the orchard variable spray system, in this article, LiDAR (light detection and ranging) detection technology was used to obtain the LWA (leaf wall area) which represented the characteristic parameters of tree canopy, and image processing technology was used to calculate the reference value of canopy parameters. The leaf wall area was drawn by two orthogonal images. According to the scale in the image, some coordinate points on the curve were obtained by using MATLAB, and the leaf wall area of the simulation tree was obtained by integral solution. The decision coefficientLWAbased on LWA was studied, so that the effects of foliage density and LWA on the variable spray were characterized.LWAwas determined by the weighted sums of1and2, where1reflected the distribution density of point cloud in the tree canopy area under the average depth in the horizontal direction,2represented the ratio of the extreme difference in the height of the point cloud distribution to the height of the subarea within the canopy subarea. By calculating the decision coefficientLWAin each vertical direction, and by substituting the flow function, the calculation model of pesticide dosage based onLWAcan be obtained. Using the control variable method, the multi nozzle flow model is studied. With the PID controller to rapidly stabilize the pressure and the fixed PWM frequency of solenoid valves, the multi-nozzle flow model experiment has been conducted. By calculating the duty cycle of the solenoid valve PWM and adjusting the working state of the pump and solenoid valve, so that the flow rate of the sprinkler can be adjusted dynamically to the various parts of the canopy, and variable spray based on LWA can be realized. On this foundation, A variable spray verification device was designed, which consisting of LiDAR, 10 m track, 4 nozzles, 3 artificial trees with a crown of 1.47 m, 1.70 m, 1.60 m were built outdoors and a multi-nozzle variable spray test was carried out. To explore the effect of calculation model of pesticide dosage based on LWA, 2 other conventional orchard spray methods were selected as reference sprayers for comparison in this article. The fist reference type was continuous spray, the second reference sprayer is pure quantitative spray to target. The test results showed that, the adhesion rate of the liquid spray is close 100%, indicating that the variable spray model based on LWA can achieve effective spraying. The pesticide saving rate of the variable spray application rate model based onLWAwas 68.34% compared with continuous spray. Compared with pure quantitative spray to target, the pesticide saving rate of the variable spray application rate model based onLWAwas 32.77%, and the drug saving effect was remarkable. The research method provides the basis for theoretical research and optimized design of plant protection equipment, and also references for further improving the spray effect and the pesticide utilization rate by variable spray.
pesticides; model; LiDAR; variable spray; decision coefficient
薛秀云,许旭锋,李 震,洪添胜,谢家兴,陈建泽,宋淑然.基于叶墙面积的果树施药量模型设计及试验[J]. 农业工程学报,2020,36(2):16-22.doi:10.11975/j.issn.1002-6819.2020.02.003 http://www.tcsae.org
Xue Xiuyun, Xu Xufeng, Li Zhen, Hong Tiansheng, Xie Jiaxing, Chen Jianze, Song Shuran. Design and test of variable spray model based on leaf wall area in orchards[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2020, 36(2): 16-22. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2020.02.003 http://www.tcsae.org
2019-06-14
2019-11-07
国家自然科学基金(31671591,31971797);广东省科技计划项目(2017A020208049);广东省普通高校特色创新项目(2018KTSCX020);现代农业产业技术体系建设专项(CARS-27);2018年省级农业科技创新及推广项目(2018LM2163);广东省现代农业产业技术体系创新团队建设专项资金(2019KJ108);2019年广东省教育厅特色创新类项目“基于大数据和人工智能的空地一体化荔枝龙眼生长精准管控关键技术研究与应用示范”
薛秀云,高级实验师。从事施肥技术、喷雾技术研究Email:xuexiuyun@scau.edu.cn
宋淑然,博士,教授。主要从事喷雾技术及测控技术研究。Email:songshuran@scau.edu.cn
10.11975/j.issn.1002-6819.2020.02.003
S491
A
1002-6819(2020)-02-0016-07
猜你喜欢
好日子(2021年8期)2021-11-04
故事作文·高年级(2021年5期)2021-06-01
小学生学习指导(高年级)(2021年4期)2021-04-29
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
文学港(2019年5期)2019-05-24
青年文学家(2017年28期)2017-11-28
伴侣(2017年7期)2017-07-11
小学科学(2015年5期)2015-06-08
新高考·高二数学(2014年7期)2014-09-18