外海军无人水面/水下作战系统发展趋势与启示
2020-11-28 07:45干雨新崔化超宋筱轩戚志刚孟凡秋
中国军转民 2020年9期
干雨新 崔化超 宋筱轩 戚志刚 孟凡秋
摘要:本文描述了外海军无人水面/水下作战系统的发展现状,总结了对我海军无人水面/水下系统发展的启示,表明我军亟需抓紧研究无人水面/水下协同作战相关理论并制定无人系统的标准规范。本文可为相关领域武器装备发展及技术攻关提供参考。
关键词:无人水面艇、无人水下潜航器、无人水面/水下作战系统、无人集群自主控制
1.引言
近年来,随着无人平台技术的迅猛发展,无人水面艇(Unmanned Surface Vehicle,USV)和无人水下潜航器(Unmanned Undersea Vehicle,UUV)因其体积小、成本低、速度快、隐蔽性好和无人员伤亡等特点,非常适合执行情报侦察、目标打击、反水雷、毁伤评估、干扰诱骗和通信中继等任务,故越来越受到人们的重视。将水面/水下无人平台纳入海上编队体系,是未来海上编队发展的一个重要方向。
鉴于无人平台协同作战相比传统作战模式具有更好的感知能力、更强的杀伤能力以及更高的生存能力,故引起了世界各军事大国浓厚的兴趣。美国国防部于2017年抓紧落实的“第三次抵消战略”中明确指出无人作战系统将作为在“反介入/区域拒止”环境下谋求不对称优势的主要抓手[1-3]。外军国防高级计划研究局(DARPA)于2017年提出了“马赛克战”的概念[4],其核心思想是从网络中心战向决策中心战转型,而决策中心战的提出和发展将在很大程度上颠覆传统的指挥控制体系,其需要打造一个面向无人装备自主作战和有人-无人协同作战的有人-无人混合指挥控制体系。
美国海军正在大力发展无人水面/水下平台的协同技术,其正在试图将人工智能技术引入到无人水面/水下平台的指挥决策中,以实现无人水面/水下平台的自主控制,使其能够实时感知战场环境,并根据战场环境变化来调整自身行为,完成指定作战任务。但是由于外军无人水面/水下平台种类繁多、用途各异、生产厂家各不相同,各无人平台系统使用不同的接口,导致系统之间的通用性差,信息共享困难,故目前使有人-无人水面/水下平台实现类似有人-无人机程度的互操作存在一定困难。外军正在致力于构建无人水面/水下平台系统的标准化接口规范,采用开放式指控架构,对现有系统进行模块化改造,为有人系统和无人系统、无人系统和无人系统的互联、互通、互操作奠定基础。
2.美海军无人水面/水下作战系统现状
美海军无人水面/水下作战系统分为无人水面艇装备、无人水下潜航器装备、无人集群系统,具体如图1所示。
2.1美海军无人水面艇现状
在外军2007年出台的《海军无人水面艇主计划》[5]中,制定了美国海军无人水面艇详细的发展规划。2018年8月,美国国防部发布了最新版的《无人系统综合路线图(2017-2042)》,用于指导外军无人系统和装备的全面发展[6]。截至目前,外军研发了众多的水面无人艇,具有代表性的型号有“斯巴达侦察兵(Spartan Scout)”“海上猎人(Sea Hunter)”“海上猫头鹰(Sea Owl)”等。
关于外军无人水面艇协同方面,于2014年8月在弗吉尼亚州尤斯蒂斯堡附近詹姆士河举行的一次演习中,13艘无人水面艇(5艘自主控制、8艘远程遥控)组成编队,进行协同组网作战。试验中,无人艇群利用其搭载的传感器形成的网络发现模拟的敌方舰艇,并迅速展开行动,集群式包围和拦截了敌方舰艇,有效阻止威胁迫近己方舰艇,成功完成了护航任务,测试中武器的射击权仍掌握在控制人员手里[7]。2016年美国海军研究办公室宣布其研发的无人系统集群作战技术可利用多艘无人艇进行协同合作,实现对己方舰艇的保护,巡逻港口,对抗敌方威胁[6]。目前,美海军致力于将这种协同组网技术从无人水面艇之间的协同拓展到与其他有人、无人系统之间的协同中去,最终融入全球信息栅格。
2.2美海军无人水下系统现状
美国是最早开展水下作战系统研究的国家,故其军用水下作战系统一直处于世界领先水平。21世纪初,美国海军提出了2030年前无人水下系统的发展规划,明确了未来系统需具备的使命和作战能力[8]。同时美国国防部发布的《无人系统综合路线图(2017-2042)》,也为美国无人水下系统制定了顶层发展規划。目前外军主要的无人水下潜航器有蓝旗金枪鱼系列、REMUS系列、LBS-Glider、X-Ray、海马、LDUUV、曼塔等,当前已部署和正在发展的无人水下系统主要有近海水下持续监视网(PLUSNet)、分布式敏捷反潜系统(DASH)、先进水下武器系统(AUWS)、浮沉载荷(UFP)、“海德拉”(Hydra)等,这些系统更倾向于在特定的水下区域提前部署,进行监视、跟踪、打击目标等任务,并通过信息链路将水下无人系统组网,使其能力倍增,实现水下“集群”式作战。未来外军致力于拓展水下使用域,将陆、海、空、天及水下有人和无人系统协同,实现跨域协同作战。
3.美海军无人水面/水下作战系统发展趋势
外军于2019年提出了System of Systems Enhanced Small Units(SESU)技术架构,将未来无人系统发展分为物理层、个体智能、群体智能、异构协同、作战运用五层。
根据第2节对美海军无人水面/水下作战系统现状的分析,结合SESU技术架构,可认为目前美海军无人水面/水下作战系统已初步具备个体智能,未来在完善个体智能的同时,还在往群体智能和异构协同方向发展,最终达到异构无人装备混合编组和有人-无人装备混合编组的模式,并具备分布式感知、分布式决策和分布式作战的能力,其发展趋势具体体现在指挥控制体系、系统自主性和互操作性三个方面。
4.对我海军指挥控制系统方面启示
4.1作战样式变化
随着无人水面艇和无人水下潜航器的不断发展,其对未来作战样式势必带来巨大的变化。由于无人平台的廉价性和无人员伤亡特点,随着无人平台自主智能程度的提高,无人系统势必从有人平台远程遥控无人平台到有人-无人平台混合编组协同作战,最后往无人集群自主作战的方向发展。美国海军研究院论文显示,经过数百次的模拟试验表明,作为外军先进的海军一体化防空火控(NIFC-CA)系统中重要组成部分的“宙斯盾”作战系统,在面对无人机的集群攻击时也显得力不从心。试验中“宙斯盾”的防御系统往往难以分配火力,从而导致部分无人机能够避开拦截,对舰艇发动攻击。便宜的无人集群将成为未来海上编队的重要威胁,而随着水面无人艇和水下无人潜航器等无人平台融入编队,未来海上作战也势必将这些无人平台进行前出,执行探测、侦察、排雷、干扰、诱骗、打击等任务,而有人平台则更倾向于居于后方进行指挥和远距离火力支援。
4.2构建无人水面/水下作战体系
按照目前水面无人艇和水下无人潜航器等无人平台的技术水平,未来我海军需构建岸基有人-无人协同指挥控制、编队有人-无人协同指挥控制和无人集群自主协同控制三层作战体系,使用“无人对无人”的策略,以抗衡外军正在发展的无人作战系统。无人水面/水下作战体系如图2所示。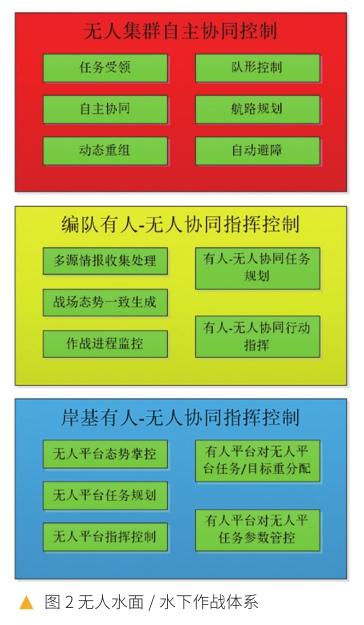
4.2.1岸基有人-无人协同指挥控制
构建岸基有人-无人协同指挥控制体系,使其具备近海联合作战、岛礁攻防等典型作战样式下水面无人艇和水下无人潜航器等无人平台的态势掌控、任务筹划与规划、实时指挥控制功能,实现对水面/水下无人平台的集中运用,以及与有人作战力量的统一组织和协同运用,具备有人平台对无人平台的任务/目标重分配及任务参数精细化管控功能,实现岸基指挥所对水面无人艇和水下无人潜航器等异构无人平台的任务监视与行动控制。
4.2.2编队有人-无人协同指挥控制
构建海上编队有人-无人协同指挥控制体系,使其具备对编队内舰、机、潜等有人平台以及水面无人艇、水下无人潜航器等无人平台的多源情报收集处理、战场态势一致生成、有人-无人协同任务规划与行动指挥、作战进程监控等功能,推进新型无人作战兵力融入联合作战体系。
4.2.3无人集群自主协同控制
构建无人集群自主协同控制体系,在水面无人艇和水下无人潜航器组成的无人集群受领作战任务后,通过自组织方式实现编队任务自主协同、动态重组、队形控制、航路规划、自动避障等功能,形成无人集群自主作战能力。
5.结束语
针对无人水面/水下作战系统,美海军已经开展了一系列研究,并初步实现了无人水面艇的集群作战。而国内对于无人水面/水下作战系统的研究尚处于起步阶段,目前依然还聚焦于理论分析和仿真实验。无人水面/水下集群协同作战这种全新的组合形式势必会对未来战争的作战样式产生重大的影响,其在作战样式、指挥、组织、训练样式等方面都会和以往有很大不同。我军必须抓紧研究无人水面/水下作战系统理论和相关技术,在发展水面/水下无人装备的同时,研究有人-无人系统协同作战和无人集群自主控制关键技术,制定相关系统的标准规范,为未来的无人水面/水下集群协同作战打好基础。
参考文献
[1]陈方舟.外军无人作战系统发展述评[J].军事文摘,2018,2:19-21.
[2]钟赟,张杰勇,邓长来.有人/无人机协同作战问题[J].指挥信息系统与技术,2017,8(4):19-25.
[3]顧海燕,徐驰.有人/无人机组队协同作战技术[J].指挥信息系统与技术,2017,8(6):33-41.
[4]李磊,蒋琪,王彤.美国马赛克战分析[J].战术导弹技术,2019,6:108-114.
[5]The Navy Unmanned Surface Vehicle(USV) Master Plan[R].2007.
[6]熊勇,余嘉俊,张加,等.无人艇研究进展及发展方向[J].船舶工程,2020,2:4-11.
[7]申云磊,高霄鹏.无人艇的研究现状与进展[J].船电技术,2018,38(9):7-10.
[8]刘乐华,赵蛟龙,巩天成.美国水下无人系统发展趋势分析[J].数字海洋与水下攻防,2019,2(1):18-23.
(作者简介:干雨新,工程师,研究方向为海军作战辅助决策技术。崔化超,高级工程师,研究方向为水下情报处理与辅助决策技术。宋筱轩,高级工程师,研究方向为信息资源管理及运维系统设计。戚志刚,研究员,研究方向为海军指挥信息系统总体技术。孟凡秋,工程师,研究方向为海军作战行动控制技术。工作单位:中国电子科技集团公司第28研究所)