
基于激光传感器的立体车库智能控制系统设计
2020-11-26 09:21:36徐有军
通信电源技术 2020年15期
徐有军
(南京交通职业技术学院 轨道交通学院,江苏 南京 211188)
0 引 言
传统立体车库智能系统通常采用射频识别和无线传感网络等技术,用于实现对立体车库的调度和管理[1]。但是,随着车库中车辆的不断增加,系统在实际运行过程中容易出现调度和管理数据混乱的问题,严重影响系统的智能化管理水平。针对这一问题,本文结合一种新兴的激光全息扫描技术,设计了一种全新的立体车库智能系统。
1 系统硬件设计
1.1 传感器
1.1.1 光电开关
车辆存在与否、车辆正确到位与否以及安全保护检测,都使用了光电开关。本文选用直流三线NPN常开型光电开关。他的实物与接线原理如图1所示。
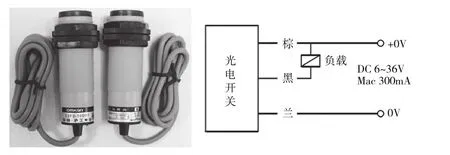
图1 光电开关实物图及其接线原理
将型号为E3F-DS100C4的红外漫反射式光电开关安装在每台车面板的任意一侧,用于检测1 m范围内的不透明物体和5 m范围内是否有车辆停放。将型号为E3F-5DN1-5L的对射式红外光电对管安装在每台车面板的四个角,用于检测5 m范围内的不透明物体,辅助提示车辆是否正常停放。将对射式红外光电开关安装在车库立柱的两侧,用于检测10 m范围内的不透明物体和是否有人或物误入停车区域,以防止车辆移动时对人、侵入物以及车库本身造成伤害。
1.1.2 基于激光全息扫描的传感器选择
采用激光全息扫描技术,实现对立体车库长、宽、高尺寸参数的测量。本文采用CNS-LC3660型号激光全息扫描传感器,检测范围最大可达4.5 m,整体扫描范围为280°,角度分辨率为0.55°。在对车辆进行检测时,它的响应时间约为45 ms。它具有128个选择通道,且每个通道内包含4个区域防护,可通过开关量输出保护区的开关量信息、传感器的Error开关量信号以及Can BUS输出开关量障碍物数据,实现对系统内其他各个硬件之间的互联和互通,从而为系统提供更加完备的软件功能配置。功能可替代传统PBS—04JS和UST—04/15。在非人为干扰状态下,该型号传感器最长使用时间可达3年以上[2]。图2为全息激光头结构图。
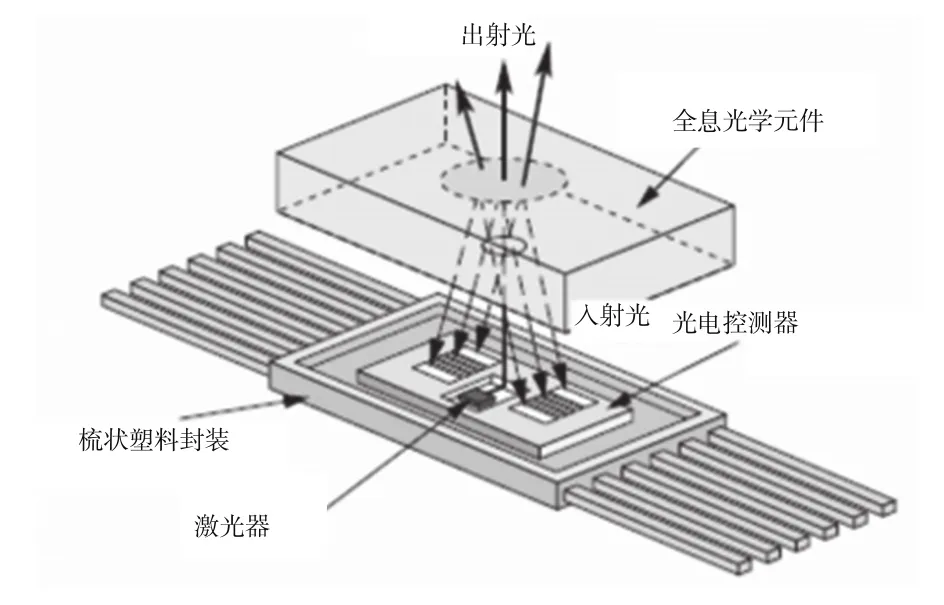
图2 全息激光头结构示意图
CNS-LC3660型号激光全息扫描传感器的日常工作电压为DC 12~32 V,总功耗约为3 W,光源为激光,波长最长可达900 nm以上,光源等级为1。图3为传感器工作原理图。

图3 传感器工作原理示意图
1.2 系统电路设计
系统电路设计主要包括激光传感器电路、超限检测电路、停车到位检测电路以及电源电路等。后两种电路可沿用传统立体车库智能系统中的电路,因此下面将重点对结合激光全息扫描的传感器电路和超限检测电路进行详细的设计说明。
激光全息扫描传感器电路主要包括发送激光端和接收激光端。系统中的激光传感器均成对出现,因此在激光信号的发送端应设置对应的激光发射,并利用对准设备调整激光,使其发射的激光光束能够直接照射到相应的接收端。在接收激光端,通过光电接收装置处理接收到的激光信号,从而得到开关量信号并传输到单片机中。激光传感器电路设计如图4所示。
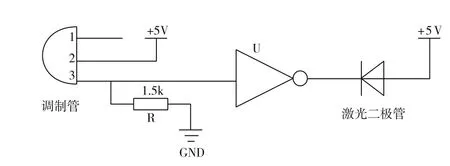
图4 激光传感器电路设计图
图2中的调制管结构相当于一个集成电路,其中包含锁相环电路和自动增益控制等多种不同类型的集成电路。通过调制管发出事先特定的频率震荡波,实现对激光管的发光控制。
系统中停车到位检测和车辆数量超限制检测的电路设计,采用用于光电测试的电路设计方法。当有车辆进入立体车库时,通过单片机控制激光全息扫描传感器开始工作。当单片机为低电平时,表示车库内的车辆超过限度,单片机立即发出警报信号,并亮起超出限度的指示灯,同时提醒车主车辆超限,无法进行停车[3]。
2 系统软件设计
2.1 立体车库车位信息采集与处理
立体车库中车位的信息主要包括车盘是否水平或垂直、车位是否停放车辆以及车位附属激光传感器信息等。这几种信息均为数字信号,因此在采集车位信息时只涉及对数字信号的采集。系统涉及的数字信号输入电路为6路,数字信号的输入端为低电平触发端,另一端挂高电位为48 V。当相应的车位信息数字信号输入回路导通时,发光二极管开始发光,并表示在该回路上存在数字信号传输。利用光耦对输入的数字信号和内部电路进行电光隔离,可防止在信号传输过程中受到外界的干扰。同时,可将光耦作为选通线,利用线选方式不断扩展输入的点数,从而满足日后系统的升级和更新需要。
2.2 PLC控制
系统中的PLC控制主要分为管理层和测控层。管理层主要负责立体车库的日常计费和打印单据等工作,还包括对测控层的实时通信管理。测控层主要负责对立体车库内车辆取车控制、位置检测以及安全检测等操作。由于各个功能的需要,测控层应当具备一定的工作可靠性和更加快速的响应时间。本文采用PLC控制,通过执行相应的程序来控制立体车库内的各个控制环节。
3 对比实验
3.1 实验准备
为进一步测试提出的基于激光全息扫描的立体车库智能系统的应用性能,充分调试系统,利用DSP++仿真实验软件,构建本文系统与传统系统的仿真模型和运行环境。在仿真实验环境中搭建一个规格为300 m×500 m×40 m的三维立体车库模型,设置车库的激光传感信息采集的中心频率为15 kHz,车辆信息规模数量为2 000,将采集的激光全息扫描信息载入相应的数据库中进行数据分析。具体地,分别在本文系统和传统系统中模拟10辆、50辆、80辆、100辆以及150辆车辆的进出库,比较两组系统的时间开销。
3.2 实验结果与分析
根据实验准备完成实验,实验结果如表1所示。出库时间开销,且车库调度的均衡性更高。可见,提出的基于激光全息扫描的立体车库智能系统可以大大缩短车辆进出库的时间开销,并提高了立体车库的利用效率,具有更高的应用性能。
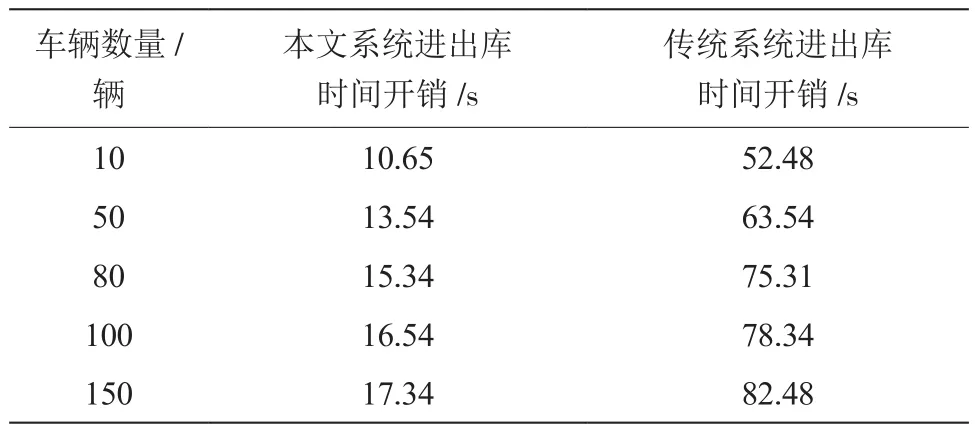
表1 实验对比表
4 结 论
结合当前建筑布局规划和立体车库停车特点,提出一种基于激光全息扫描的立体车库智能系统,从而实现对立体车库车辆入库、出库检测及引导智能控制。本文研究立体车库的定位及引导系统设计,具有一定的参考价值。今后还将深入研究如何优化行车路线和如何做好立体车库的运行管理。
猜你喜欢
商品与质量(2020年33期)2020-11-07 02:19:42
电子技术与软件工程(2020年23期)2020-03-15 02:44:30
现代商贸工业(2018年31期)2018-12-08 11:17:54
电子测试(2018年13期)2018-09-26 03:29:32
电子制作(2018年16期)2018-09-26 03:27:16
吉林大学学报(理学版)(2018年2期)2018-03-27 08:02:52
电子测试(2017年11期)2017-12-15 08:56:50
电子制作(2017年2期)2017-05-17 03:54:53
国防制造技术(2016年2期)2016-03-12 17:34:26
北京信息科技大学学报(自然科学版)(2016年5期)2016-02-27 06:31:45
