庄 健, 王志武, 廖晓波,2
(1. 西安交通大学 机械工程学院,陕西 西安 710049;2. 西南科技大学 制造科学与工程学院,四川 绵阳 621010)
以高的时间-空间分辨率捕捉细胞等生物样品的动态响应过程在生命科学研究领域中具有重要意义,然而能够实现该功能的科学仪器并不多。扫描离子电导显微技术(Scanning ion conductance microscopy, SICM)能够在细胞培养环境下以无损伤的方式在纳米尺度测量活细胞的形态、力学和电学特性[1-2],已在包括药物、纳米颗粒作用下细胞的动态响应研究中得到了广泛应用[3-4]。常用的SICM扫描模式有直流模式、调制模式和跳跃模式等[1,5-7]。直流和调制模式采用的是连续扫描模式,不适合形貌高度突变样品的扫描成像[3]。跳跃模式是一种非连续扫描模式,由于具备对高度复杂表面形貌样品的成像能力,已发展为SICM的主流扫描模式[6]。在跳跃模式中,在每一测量点探针均需由远到近逼近样品表面探测表面的高度,这一特点使其成像速度极慢。限制跳跃模式速度的主要因素有探针在Z向运动的跳跃幅值、探针下探速度等。跳跃幅值通常凭经验设定;探针下探速度由探针尖端的开口尺寸、以及Z向压电定位器响应快慢决定[8-9]。常规SICM探针的下探速度仅为20~100 nm/ms,严重制约着成像的快速性。同一开口尺寸的探针,下探速度越大,过冲越大,很容易使探针碰撞样品并断裂。因此,减小探针高速下探时的过冲成为提高扫描速度的关键。提高下探速度的常用方法是提高Z向定位平台的固有频率,从而减小平台的响应时间[9-10],但是难免会降低探针Z向的测量行程[11]。日本学者Ando设计了一种高速XYZ压电定位平台,可以使10 nm开口半径探针的下探速度达到400 nm/ms,但是Z向测量范围仅为6 μm且三轴存在交叉耦合,降低了定位平台的精度[9]。德国学者Schäffer采用样品在Z向运动的扫描器设计方案,提高了SICM的扫描速度(对A6细胞成像一帧0.6 s),但是Z向压电定位平台的最大行程仅为5 μm,限制了测量高纵横比样品的能力[10]。
由此可见,Z向压电定位平台设计要兼顾Z向测量范围避免高速下探的过冲就变得尤为重要。由于压电堆式作动器的最大输出位移一般为其自身长度的0.1%,直接驱动的设计方案很难满足SICM的Z向测量行程要求。而位移放大机构,例如杠杆放大、三角形放大、桥式放大等[11-13],能够实现输出位移的放大。柔性放大机构(包括柔性铰链等)具有无摩擦、免润滑、免装配、放大倍数高等优点[14-15]。然而,使用放大机构会降低系统的动态性能和输出刚度。采用压电作动器直接驱动方案(对位移无放大作用),可直接提供预紧力,平台具有结构紧凑、体积小的优点,有利于提高动态性能[16-17]。因此,联合采用位移放大与直接驱动的方案,是SICM高速扫描兼顾测量范围与快速性的可选配置。本课题组之前提出了一种调制电流式SICM,但是该模式采用小压电平台进行正弦振动来产生调制电流信号,随着正弦振动频率的提高,易于引起大行程定位平台的机械共振,限制了扫描速度的提高[16]。
基于以上考虑,本文设计了一种用于提高SICM跳跃工作模式的Z向双压电定位平台。该平台采用位移放大机构放大压电作动器的输出位移,采用弹性薄板直接驱动实现小压电作动器的高速运动。将大行程和高速压电定位平台串联,即满足高纵横比样品的测量,又提升了探针接近速度,真正地从物理结构上解决了跳跃模式过冲大、成像慢的问题。
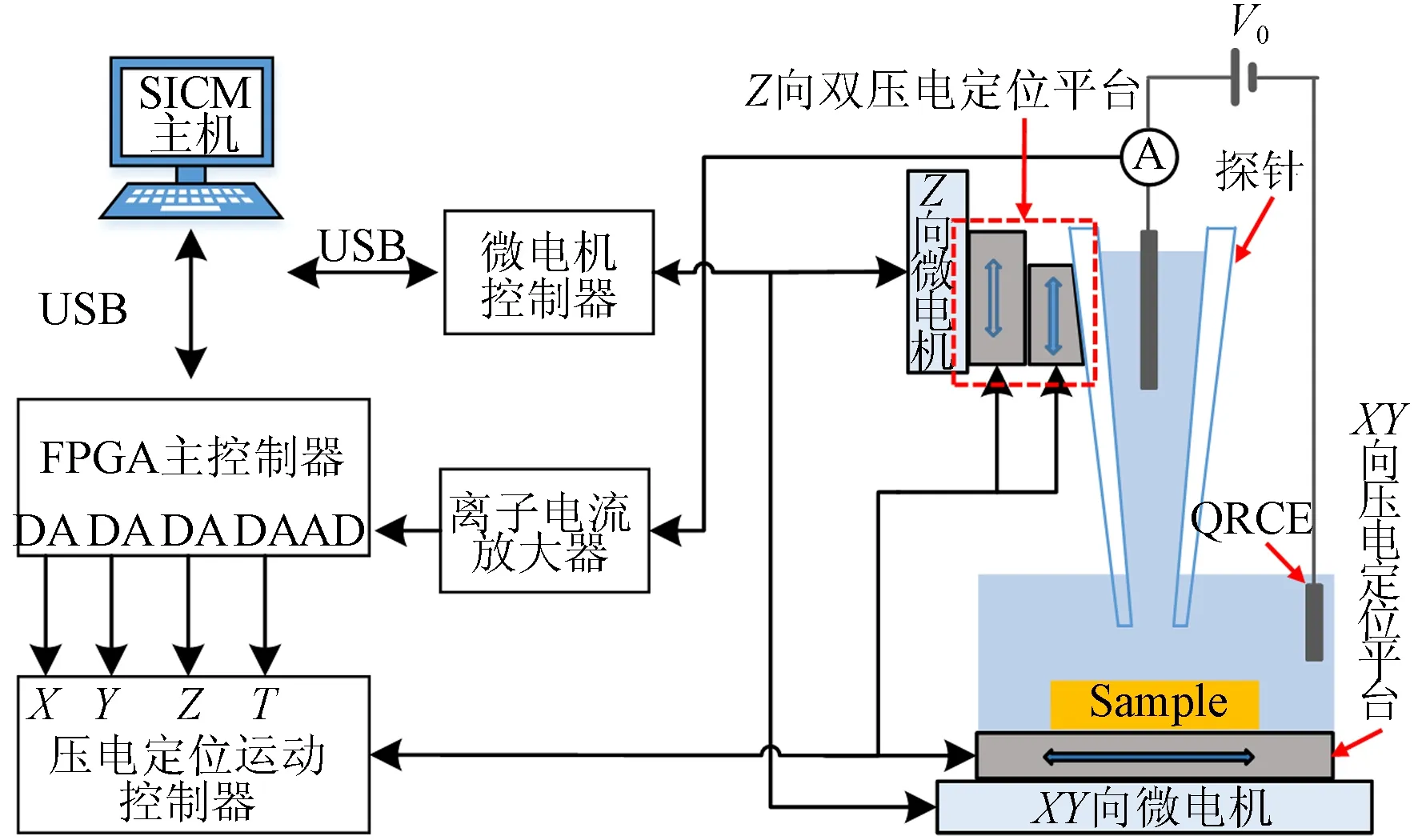
基于双压电定位平台的SICM系统配置如图1所示。样品和探针间的相对运动主要由XY和Z向微电机(M111.1DG,PI,Germany,15 mm行程)、XY压电定位平台(P621.2CL,100 μm行程)和自行研制的Z向双压电定位平台实现。XY和Z向压电定位平台分别固定在XY和Z向微电机上,实现样品与探针间距的粗略定位和精密定位。本文设计的是一种基于大行程和高速压电驱动柔性机构串联的Z向定位平台,在系统中的位置如图1所示。
图1 基于Z向双压电定位平台的SICM系统Fig.1 SICM system based on dual-stage nanopositioner
传统跳跃模式中的Z向探针下探速度需满足va本文设计的Z向双压电定位平台旨在获得高的下探速度,且最大输出位移可满足细胞表面特征信息的测量(约30 μm)。图2所示为设计的双压电高速定位平台结构图。图2 Z向双压定位平台总体设计Fig.2 Overall design of Z-direction dual-stage nanopositioner整个平台由三大部分构成:菱形位移放大机构、柔性导向机构支撑的运动平台以及环形小压电陶瓷驱动的高速定位平台。大压电作动器(型号P888.51)通过菱形位移放大机构输出放大位移,菱形放大机构的输出端驱动一个运动平台,该运动平台由4个柔性导向机构支撑。在平台的运动端有放置环型小压电作动器的圆形凹槽,环形小压电作动器(型号:PD080.31)由柔性薄板提供预紧力,SICM探针末端整体伸入平台中心孔,并可与柔性薄板固定在一起。Ag/AgCl电极通过预留的电极孔穿入并最终插入固定在SICM探针的空腔中。为了最大程度减小负载对定位平台动态性能的影响,需要将探针折断到15 mm,并与柔性薄板固定牢固。大压电作动器通过位移放大机构驱动运动端带动探针沿Z轴上下运动,环型小压电作动器能够通过柔性薄板预紧使探针沿Z向高速运动。菱形放大机构、运动导向机构和直接驱动机构的静动态性能可通过调节对应的几何参数(菱形夹角θ、梁宽度t,高度b,长度l及薄板厚度等)实现。2.3 关键参数双压电定位平台的结构材料选型为铝合金(材料型号Al7075)。该材料价格相对低廉、易于实现精密加工,具有相对较高的E/ρ值,有利于提高平台刚度(弹性模量E=72 GPa,泊松比为0.33,密度ρ=2 810 kg/m3)[11]。平台的关键几何参数如图3所示,取值如表1所示。双压电陶瓷驱动器的相关参数如表2所示。图3 双压电定位平台的关键几何参数Fig.3 Key geometric parameters of dual-stage positioner表1 定位平台的关键参数表2 双压电陶瓷驱动器参数3 导向机构与放大机构建模3.1 导向机构的刚度建模导向机构是由四个片状柔性梁组成的。取单个片状柔性梁为分析对象,建立等效模型,由欧拉梁计算公式可知,单个导向机构的刚度解析计算公式为:(1)式中:ks为单个片状柔性梁的刚度,l1为片状柔性梁的长度,E为杨氏模量,I1为惯性矩。由于有4个片状柔性梁对称平行布置,因此导向机构的总等效刚度为4个柔性梁刚度之和。即:(2)式中:I1=bt13/12,b为梁的高度,t1为梁的厚度。由于整个定位平台是由菱形位移放大机构与导向机构串联而成,放大机构的输出端直接与导向机构相连,导向机构的末端位移与菱形放大机构的输出位移相等,因此,导向机构对放大机构的加载效应等效为弹性加载,其端口刚度为Kload=Kguide[14]。3.2 位移放大机构建模利用卡氏第二定理可以对其输入-输出静态位移和力的关系进行建模。由于菱形放大机构为对称结构,因此只对其四分之一的结构进行分析(如图4所示静力学模型)。图4 四分之一放大机构的静力学模型Fig.4 Static model of quarter of amplification mechanism基于欧拉-伯努利梁理论求解图4所示的输入输出位移模型。当考虑位移放大机构柔性梁的平移和弯曲变形时,输入输出位移如下:(3)(4)式中:A为梁截面面积,I为对应截面关于柔性臂中性轴的惯性矩,f(x)和M(x)分别为沿柔性臂中性轴的轴向拉力和力矩。由图4可知:f(x)=(fin·cosθ+fout·sinθ)/2,(5)M(x)=(fin·sinθ+fout·cosθ)·(l2/2-x)/2.(6)由式(3)~式(6)求积分,柔性放大机构的输入输出静力学位移可写为柔度矩阵的形式,如式(7)~式(12)所示:(7)(8)(9)(10)(11)(12)式中:l2为菱形放大机构柔性臂的长度;t2为柔性臂的厚度,θ为放大机构柔性臂的角度(如图3所示)。基于式(3)~式(12),计算得到放大机构的输出输入刚度kout,kin,位移放大比Ramp,分别为:(13)kin=1/c11,kout=c11/(c11c22-c21c12).(14)最终可得柔性定位平台的输出位移为:(15)式中:Kpzt为压电陶瓷作动器的刚度,Δl0为其标称位移,Kload为4个导向机构的等效刚度。T1为考虑压电作动器和柔性位移放大器有限刚度的传递系数,表达式如下:(16)带入参数计算得定位平台的输出行程约为34.6 μm。3.3 小压电高速定位平台的最大输出行程高速小定位平台采用柔性薄板来近似计算其输出端刚度。考虑到一个外边缘固定的柔性板,环形压电作动器与该柔性板固定,环形压电作动器施加在柔性板上的载荷为F=PA,A为环形压电作动器端面与柔性板的接触面积,P为压力,则柔性板在垂直方向上的变形量δz为[19]:(17)式中C1,C2,C3,C4,C5的表达式见文献[19]。其中E= 72 GPa;泊松比v=0.33;rb=4 mm,薄板厚度取t=0.25 mm,ra=5.6 mm,则沿着驱动方向的刚度为:(18)计算得kf=9.4 N/μm,则小压电定位平台的输出端行程为:ΔL=ΔL0·kp/(kf+kp),(19)式中:ΔL为柔性面簧在预载作用下的输出位移,ΔL0是环型小压电作动器无载荷时的最大输出位移,kf和kp分别是柔性板和环型压电陶瓷驱动器的刚度。因此,由本文设计的几何参数计算得到环形高速压电平台的输出行程ΔL= 1.96 μm。4 有限元分析4.1 大行程压电定位平台本节采用SolidWorks对平台进行建模,并使用COMSOL5.3软件包进行静力学和模态分析。有限元模型结构和材料参数如表1和表2所示。模型中4个螺钉孔设为固定端,沿柔性放大机构输入端分别加载200 N的力,记录得到菱形放大机构的每个输入端的位移均为5.23 μm,平台沿X,Y方向的变形结果和应力云图分别如图5(a)、5(b)和5(c)所示。记录定位平台运动部分(由四个导向机构支撑)的位移为23.27 μm,因此平台的位移放大比为:Rstage=Xout/Xin=23.27/2×5.23=2.22.(20)Rstage小于解析解的放大比(2.31),以有限元计算为真值,偏差为4.0%。考虑到大压电作动器的标称位移为15 μm,由于在输出方向上其刚度有限,因此装夹在放大机构中后,实际输出位移会有部分损失。图5(d)所示为放大机构两输入端分别输入7.5 μm时,整个平台的应力云图,最大应力为49.5 MPa,发生在放大机构输出端的内侧,远小于Al7075铝合金材料的屈服强度503 MPa。因此定位平台可以工作在弹性变形范围内。图5 有限元静力学分析结果对设计的大行程-高速压电定位平台进行模态分析,4个螺栓孔为固定端,求解得到前5阶的固有频率,分别如图6(a)~6(e)所示。第一阶固有频率的振型是沿着X方向的平动,和放大机构位移输出端的运动方向相同。图6 有限元分析得到的前5阶固有频率Fig.6 First 5 order natural frequencies obtained by FEA4.2 双压电定位平台动态性能采用和大行程压电定位平台同样的有限元分析方法(静力学刚度分析),得到高速小压电定位平台的刚度约为7.6 N/μm,和解析解差距较大,原因是解析模型进行了一定程度的简化。在双压电定位平台的输入端输入频率为10~150 kHz的扫频驱动信号,记录定位平台输出端的位移,得到大行程慢速定位平台和小行程快速定位平台的幅频响应曲线,如图7所示。由共振频率确定双压电定位平台动态性能,能够满足SICM高速扫描的要求。图7 大行程慢速和小行程快速平台的幅频响应曲线Fig.7 Dynamic response of dual-stage positioners4.3 基于双压电定位平台的高速SICM扫描流程基于双压电定位平台的SICM高速扫描流程如图8所示。扫描步骤如下:图8 双压电定位平台SICM高速扫描示意图Fig.8 Schematic diagram of high-speed SICM scanning based on dual-stage positioner(1)首先,探针在Z向从初始位置逼近样品表面,待进入工作区后,根据进入工作区的位置高度,设定探针的最大运动高度(pmax)和最小高度(pmin)值。(2)施加驱动电压使环型小压电定位平台的输出端伸长量达到最大并保持不变(如图8所示PZT2驱动信号中a阶段)。施加驱动电压使大压电定位平台输出端向上运动到最高位置pmax,然后给大压电作动器施加线性减小的电压(如图8所示PZT1驱动信号中a阶段),使探针逐渐由pmax向pmin位置运动。(3)在探针接近过程中(如图8所示a阶段),当系统检测到离子电流I减小到设定的阈值电流Iset时,立即对大-小压电作动器同时施加相反的电压控制信号,使探针以最快速度撤离样本表面(如图8所示b阶段)。(4)待探针缩回到最大位置高度pmax时,恢复小压电作动器的施加电压使其输出端伸长量达到最大值并保持恒定(如图8中bc阶段);驱动XY向压电定位平台使样品运动到下一个测量点,探针在Z向重复执行(2)~(3)步骤,直到完成所有测量点扫描。5 实验结果与讨论5.1 探针接近表面的离子电流过冲测试为了验证双压电定位平台对SICM扫描速度提升的有效性,本节在跳跃模式下,仅使用大行程压电定位平台和使用双压电定位平台(高速大行程)分别对培养皿底面进行接近曲线测试。实验时离子电流的阈值设为1%。仅使用大行程压电定位平台时,探针接近速度(va)分别设置为75,95,110,200 nm/ms。当使用双压电定位平台时,探针接近速度(va)分别设置为75,150,300,500 nm/ms。两种平台配置下的离子电流接近曲线分别如图9(a)和图9(b)所示。图9 大行程和双压电定位平台工作时的电流接近曲线Fig.9 Current approach curves with single and dual-stage working仅有大行程压电定位平台工作时,当接近速度达到200 nm/ms时,离子电流的减小量超过了70%刻度,此时探针很有可能已经接触到了培养皿底部。说明仅使用单一大行程定位平台在接近速度增加易产生很大的过冲,使探针碰接样品或断裂。而在大小双压电定位平台工作时,当探针下探速度达到500 nm/ms,离子电流减小量为83%刻度。说明采用双压电平台可以有效抑制高速下探运动引起的电流过冲,避免探针碰撞样品或探针断裂。因此,双压电平台扫描可使探针以更大的接近速度扫描,从而提高跳跃模式的成像速度。5.2 扫描成像快速性测试扫描实验使用和电流过冲测试相同的探针(图10中SEM图像所示)。被测样品为聚二甲基硅氧烷(PDMS)样品,表面制备有圆形微观形貌,SEM图像如图10中右图所示。对样品的不同区域分别进行多次形貌扫描,成像在相同的跳跃幅度下进行。其中,使用双压电定位平台对样品斜面区域的成像结果如图11所示,探针的下探速度(va)分别设置为100,350,450 nm/ms。扫描点数为40×40点,相邻测量点间距为1 μm。3种接近速度均能够得到重复性较好的形貌图像。随着下探速度的提高,双压电定位平台始终能够获取到斜面形貌图像。图10 SICM探针与成像样品的SEM图像Fig.10 SEM images of SICM probe and sample图11 双压电驱动平台配置下SICM成像结果Fig.11 SICM imaging results with dual-stage nanopositioner图12所示为仅使用大行程压电定位平台,设置接近速度(va)为70 nm/ms时,样品的斜坡形貌图像(40×40 点)。可见在图像斜表面有明显的噪声点,说明仅使用单块大行程定位平台,接近速度过大时探针尖端离子电流达到阈值时过冲严重,平台响应速度慢,轻则使探针碰撞到样品,重则使探针完全断裂,导致扫描失败。此外,相比于扫描平面,扫描斜面时,探针提前进入阈值电流区,在同样的阈值电流下,在斜面处更容易与样品发生接触或碰撞[20],进而引起噪声干扰。图12 仅用大行程慢速定位平台的成像结果(70 nm/ms)Fig.12 SICM imaging with single slow-positioner (70 nm/ms)为了进一步验证双压电定位平台的成像速率优势,本节采用平均像素点成像速率指标f来衡量并对比单块大行程慢速和双压电定位平台配置下的成像速率。f的定义如下:(21)式中:f为平均像素点的成像频率;tk为扫描得到第k幅形貌图像消耗的时间;M×N为图像总像素点个数;L为每种定位平台配置扫描得到的图像个数。同时,通过计算形貌图像的MSE值对比两种平台的成像稳定性。对同一样品区域进行重复扫描,探针和扫描参数(像素点间距、探针尖端起始位置、扫描区域面积)相同,对同种类样品进行10次重复扫描成像。指标MSE定义如式(22)所示:(22)(23)由于样品的形貌特征高度已知,所以扫描时设置的跳跃幅度为8 μm,统计两种方法重复测量10次的平均像素点成像频率和图像MSE值。两种配置的成像结果如图13所示。可见采用单块大行程定位平台时,随着下探速度由50 nm/ms增加到70 nm/ms,成像质量降低,形貌图像的表面尖峰噪声增多。原因主要是探针在离子电流降低到阈值后,来不及迅速撤离样品,进而引起探针与样品接触,电流噪声增多。而在双压电定位平台工作时,随着探针下探速度由300 nm/ms增加到500 nm/ms,图像表面仍然非常光滑、一致性好,说明双压电定位平台能够在离子电流降低到阈值后,迅速撤离样品,进而减少了噪声干扰。图13 单一大行程和双压电定位平台的SICM成像结果分别采用两种不同定位平台配置,在不同探针下探速度下统计成像速率和图像噪声(稳定性),结果如表3所示。表3 两种压电定位平台配置下SICM成像性能对比Tab.3 Comparison of imaging quality with different positioner configurations由表3可知,对于单个大行程压电定位平台配置,随着探针下探速度的增加(30~70 nm/ms),成像的平均像素点成像频率由4.65 Hz增加到9.56 Hz;图像的MSE值增加(189.23~649.67 nm2),平均噪声点数同步增加,说明成像稳定性变差。而采用双压电定位平台时,随着探针的下探速度由60 nm/ms增加到500 nm/ms,成像的平均像素点成像频率由8.32 Hz增加到29.67 Hz;平均MSE值为160.45~250.55 nm2。使用双压电定位平台获得图像MSE的均值和标准差分别为198.65,37.37 nm2,而使用大行程单定位平台获得图像MSE的均值和标准差分别为388.75,180.36 nm2。后者分别为前者的1.96倍和4.83倍,说明双压电定位平台在提高成像速率的同时重复成像的稳定性优于仅使用单个大行程压电定位平台,从而验证了双压电定位平台高速扫描的优势。6 结 论针对传统SICM跳跃模式在高速扫描时存在的探针运动过冲、成像速率慢等问题,本文提出采用双压电纳米定位平台的扫描方法。本文通过串联大行程慢速和小行程快速压电定位平台,使扫描系统兼顾了Z向测量范围和响应快速性的要求。大小双压电定位平台同时工作,使得以跳跃模式扫描时探针能够快速提离样品表面,解决了探针高速下探时的运动过冲问题。针对传统压电作动器输出位移小的问题,本文采用菱形位移放大机构实现位移放大,然后基于解析模型计算了平台的静力学性能参数,并采用有限元方法分析了双压电平台的静/动态特性。最后,加工平台样机并进行了接近曲线和扫描成像的测试。实验结果表明,设计的双压电定位平台在保证成像稳定性的前提下克服了运动过冲、探针下探的速度(至少达到500 nm/ms),有效提高了跳跃模式的成像效率。
本文设计的Z向双压电定位平台旨在获得高的下探速度,且最大输出位移可满足细胞表面特征信息的测量(约30 μm)。图2所示为设计的双压电高速定位平台结构图。
图2 Z向双压定位平台总体设计Fig.2 Overall design of Z-direction dual-stage nanopositioner
整个平台由三大部分构成:菱形位移放大机构、柔性导向机构支撑的运动平台以及环形小压电陶瓷驱动的高速定位平台。大压电作动器(型号P888.51)通过菱形位移放大机构输出放大位移,菱形放大机构的输出端驱动一个运动平台,该运动平台由4个柔性导向机构支撑。在平台的运动端有放置环型小压电作动器的圆形凹槽,环形小压电作动器(型号:PD080.31)由柔性薄板提供预紧力,SICM探针末端整体伸入平台中心孔,并可与柔性薄板固定在一起。Ag/AgCl电极通过预留的电极孔穿入并最终插入固定在SICM探针的空腔中。为了最大程度减小负载对定位平台动态性能的影响,需要将探针折断到15 mm,并与柔性薄板固定牢固。
大压电作动器通过位移放大机构驱动运动端带动探针沿Z轴上下运动,环型小压电作动器能够通过柔性薄板预紧使探针沿Z向高速运动。菱形放大机构、运动导向机构和直接驱动机构的静动态性能可通过调节对应的几何参数(菱形夹角θ、梁宽度t,高度b,长度l及薄板厚度等)实现。
双压电定位平台的结构材料选型为铝合金(材料型号Al7075)。该材料价格相对低廉、易于实现精密加工,具有相对较高的E/ρ值,有利于提高平台刚度(弹性模量E=72 GPa,泊松比为0.33,密度ρ=2 810 kg/m3)[11]。平台的关键几何参数如图3所示,取值如表1所示。双压电陶瓷驱动器的相关参数如表2所示。
图3 双压电定位平台的关键几何参数Fig.3 Key geometric parameters of dual-stage positioner
表1 定位平台的关键参数
表2 双压电陶瓷驱动器参数
导向机构是由四个片状柔性梁组成的。取单个片状柔性梁为分析对象,建立等效模型,由欧拉梁计算公式可知,单个导向机构的刚度解析计算公式为:
(1)
式中:ks为单个片状柔性梁的刚度,l1为片状柔性梁的长度,E为杨氏模量,I1为惯性矩。由于有4个片状柔性梁对称平行布置,因此导向机构的总等效刚度为4个柔性梁刚度之和。即:
(2)
式中:I1=bt13/12,b为梁的高度,t1为梁的厚度。
由于整个定位平台是由菱形位移放大机构与导向机构串联而成,放大机构的输出端直接与导向机构相连,导向机构的末端位移与菱形放大机构的输出位移相等,因此,导向机构对放大机构的加载效应等效为弹性加载,其端口刚度为Kload=Kguide[14]。
利用卡氏第二定理可以对其输入-输出静态位移和力的关系进行建模。由于菱形放大机构为对称结构,因此只对其四分之一的结构进行分析(如图4所示静力学模型)。
图4 四分之一放大机构的静力学模型Fig.4 Static model of quarter of amplification mechanism
基于欧拉-伯努利梁理论求解图4所示的输入输出位移模型。当考虑位移放大机构柔性梁的平移和弯曲变形时,输入输出位移如下:
(3)
(4)
式中:A为梁截面面积,I为对应截面关于柔性臂中性轴的惯性矩,f(x)和M(x)分别为沿柔性臂中性轴的轴向拉力和力矩。由图4可知:
f(x)=(fin·cosθ+fout·sinθ)/2,
(5)
M(x)=(fin·sinθ+fout·cosθ)·(l2/2-x)/2.
(6)
由式(3)~式(6)求积分,柔性放大机构的输入输出静力学位移可写为柔度矩阵的形式,如式(7)~式(12)所示:
(7)
(8)
(9)
(10)
(11)
(12)
式中:l2为菱形放大机构柔性臂的长度;t2为柔性臂的厚度,θ为放大机构柔性臂的角度(如图3所示)。基于式(3)~式(12),计算得到放大机构的输出输入刚度kout,kin,位移放大比Ramp,分别为:
(13)
kin=1/c11,kout=c11/(c11c22-c21c12).
(14)
最终可得柔性定位平台的输出位移为:
(15)
式中:Kpzt为压电陶瓷作动器的刚度,Δl0为其标称位移,Kload为4个导向机构的等效刚度。T1为考虑压电作动器和柔性位移放大器有限刚度的传递系数,表达式如下:
(16)
带入参数计算得定位平台的输出行程约为34.6 μm。
高速小定位平台采用柔性薄板来近似计算其输出端刚度。考虑到一个外边缘固定的柔性板,环形压电作动器与该柔性板固定,环形压电作动器施加在柔性板上的载荷为F=PA,A为环形压电作动器端面与柔性板的接触面积,P为压力,则柔性板在垂直方向上的变形量δz为[19]:
(17)
式中C1,C2,C3,C4,C5的表达式见文献[19]。其中E= 72 GPa;泊松比v=0.33;rb=4 mm,薄板厚度取t=0.25 mm,ra=5.6 mm,则沿着驱动方向的刚度为:
(18)
计算得kf=9.4 N/μm,则小压电定位平台的输出端行程为:
ΔL=ΔL0·kp/(kf+kp),
(19)
式中:ΔL为柔性面簧在预载作用下的输出位移,ΔL0是环型小压电作动器无载荷时的最大输出位移,kf和kp分别是柔性板和环型压电陶瓷驱动器的刚度。因此,由本文设计的几何参数计算得到环形高速压电平台的输出行程ΔL= 1.96 μm。
本节采用SolidWorks对平台进行建模,并使用COMSOL5.3软件包进行静力学和模态分析。有限元模型结构和材料参数如表1和表2所示。模型中4个螺钉孔设为固定端,沿柔性放大机构输入端分别加载200 N的力,记录得到菱形放大机构的每个输入端的位移均为5.23 μm,平台沿X,Y方向的变形结果和应力云图分别如图5(a)、5(b)和5(c)所示。记录定位平台运动部分(由四个导向机构支撑)的位移为23.27 μm,因此平台的位移放大比为:
Rstage=Xout/Xin=23.27/2×5.23=2.22.
(20)
Rstage小于解析解的放大比(2.31),以有限元计算为真值,偏差为4.0%。考虑到大压电作动器的标称位移为15 μm,由于在输出方向上其刚度有限,因此装夹在放大机构中后,实际输出位移会有部分损失。图5(d)所示为放大机构两输入端分别输入7.5 μm时,整个平台的应力云图,最大应力为49.5 MPa,发生在放大机构输出端的内侧,远小于Al7075铝合金材料的屈服强度503 MPa。因此定位平台可以工作在弹性变形范围内。
图5 有限元静力学分析结果
对设计的大行程-高速压电定位平台进行模态分析,4个螺栓孔为固定端,求解得到前5阶的固有频率,分别如图6(a)~6(e)所示。第一阶固有频率的振型是沿着X方向的平动,和放大机构位移输出端的运动方向相同。
图6 有限元分析得到的前5阶固有频率Fig.6 First 5 order natural frequencies obtained by FEA
采用和大行程压电定位平台同样的有限元分析方法(静力学刚度分析),得到高速小压电定位平台的刚度约为7.6 N/μm,和解析解差距较大,原因是解析模型进行了一定程度的简化。在双压电定位平台的输入端输入频率为10~150 kHz的扫频驱动信号,记录定位平台输出端的位移,得到大行程慢速定位平台和小行程快速定位平台的幅频响应曲线,如图7所示。由共振频率确定双压电定位平台动态性能,能够满足SICM高速扫描的要求。
图7 大行程慢速和小行程快速平台的幅频响应曲线Fig.7 Dynamic response of dual-stage positioners
基于双压电定位平台的SICM高速扫描流程如图8所示。扫描步骤如下:
图8 双压电定位平台SICM高速扫描示意图Fig.8 Schematic diagram of high-speed SICM scanning based on dual-stage positioner
(1)首先,探针在Z向从初始位置逼近样品表面,待进入工作区后,根据进入工作区的位置高度,设定探针的最大运动高度(pmax)和最小高度(pmin)值。
(2)施加驱动电压使环型小压电定位平台的输出端伸长量达到最大并保持不变(如图8所示PZT2驱动信号中a阶段)。施加驱动电压使大压电定位平台输出端向上运动到最高位置pmax,然后给大压电作动器施加线性减小的电压(如图8所示PZT1驱动信号中a阶段),使探针逐渐由pmax向pmin位置运动。
(3)在探针接近过程中(如图8所示a阶段),当系统检测到离子电流I减小到设定的阈值电流Iset时,立即对大-小压电作动器同时施加相反的电压控制信号,使探针以最快速度撤离样本表面(如图8所示b阶段)。
(4)待探针缩回到最大位置高度pmax时,恢复小压电作动器的施加电压使其输出端伸长量达到最大值并保持恒定(如图8中bc阶段);驱动XY向压电定位平台使样品运动到下一个测量点,探针在Z向重复执行(2)~(3)步骤,直到完成所有测量点扫描。
为了验证双压电定位平台对SICM扫描速度提升的有效性,本节在跳跃模式下,仅使用大行程压电定位平台和使用双压电定位平台(高速大行程)分别对培养皿底面进行接近曲线测试。实验时离子电流的阈值设为1%。仅使用大行程压电定位平台时,探针接近速度(va)分别设置为75,95,110,200 nm/ms。当使用双压电定位平台时,探针接近速度(va)分别设置为75,150,300,500 nm/ms。两种平台配置下的离子电流接近曲线分别如图9(a)和图9(b)所示。
图9 大行程和双压电定位平台工作时的电流接近曲线Fig.9 Current approach curves with single and dual-stage working
仅有大行程压电定位平台工作时,当接近速度达到200 nm/ms时,离子电流的减小量超过了70%刻度,此时探针很有可能已经接触到了培养皿底部。说明仅使用单一大行程定位平台在接近速度增加易产生很大的过冲,使探针碰接样品或断裂。而在大小双压电定位平台工作时,当探针下探速度达到500 nm/ms,离子电流减小量为83%刻度。说明采用双压电平台可以有效抑制高速下探运动引起的电流过冲,避免探针碰撞样品或探针断裂。因此,双压电平台扫描可使探针以更大的接近速度扫描,从而提高跳跃模式的成像速度。
扫描实验使用和电流过冲测试相同的探针(图10中SEM图像所示)。被测样品为聚二甲基硅氧烷(PDMS)样品,表面制备有圆形微观形貌,SEM图像如图10中右图所示。对样品的不同区域分别进行多次形貌扫描,成像在相同的跳跃幅度下进行。其中,使用双压电定位平台对样品斜面区域的成像结果如图11所示,探针的下探速度(va)分别设置为100,350,450 nm/ms。扫描点数为40×40点,相邻测量点间距为1 μm。3种接近速度均能够得到重复性较好的形貌图像。随着下探速度的提高,双压电定位平台始终能够获取到斜面形貌图像。
图10 SICM探针与成像样品的SEM图像Fig.10 SEM images of SICM probe and sample
图11 双压电驱动平台配置下SICM成像结果Fig.11 SICM imaging results with dual-stage nanopositioner
图12所示为仅使用大行程压电定位平台,设置接近速度(va)为70 nm/ms时,样品的斜坡形貌图像(40×40 点)。可见在图像斜表面有明显的噪声点,说明仅使用单块大行程定位平台,接近速度过大时探针尖端离子电流达到阈值时过冲严重,平台响应速度慢,轻则使探针碰撞到样品,重则使探针完全断裂,导致扫描失败。此外,相比于扫描平面,扫描斜面时,探针提前进入阈值电流区,在同样的阈值电流下,在斜面处更容易与样品发生接触或碰撞[20],进而引起噪声干扰。
图12 仅用大行程慢速定位平台的成像结果(70 nm/ms)Fig.12 SICM imaging with single slow-positioner (70 nm/ms)
为了进一步验证双压电定位平台的成像速率优势,本节采用平均像素点成像速率指标f来衡量并对比单块大行程慢速和双压电定位平台配置下的成像速率。f的定义如下:
(21)
式中:f为平均像素点的成像频率;tk为扫描得到第k幅形貌图像消耗的时间;M×N为图像总像素点个数;L为每种定位平台配置扫描得到的图像个数。同时,通过计算形貌图像的MSE值对比两种平台的成像稳定性。对同一样品区域进行重复扫描,探针和扫描参数(像素点间距、探针尖端起始位置、扫描区域面积)相同,对同种类样品进行10次重复扫描成像。指标MSE定义如式(22)所示:
(22)
(23)
由于样品的形貌特征高度已知,所以扫描时设置的跳跃幅度为8 μm,统计两种方法重复测量10次的平均像素点成像频率和图像MSE值。两种配置的成像结果如图13所示。可见采用单块大行程定位平台时,随着下探速度由50 nm/ms增加到70 nm/ms,成像质量降低,形貌图像的表面尖峰噪声增多。原因主要是探针在离子电流降低到阈值后,来不及迅速撤离样品,进而引起探针与样品接触,电流噪声增多。而在双压电定位平台工作时,随着探针下探速度由300 nm/ms增加到500 nm/ms,图像表面仍然非常光滑、一致性好,说明双压电定位平台能够在离子电流降低到阈值后,迅速撤离样品,进而减少了噪声干扰。
图13 单一大行程和双压电定位平台的SICM成像结果
分别采用两种不同定位平台配置,在不同探针下探速度下统计成像速率和图像噪声(稳定性),结果如表3所示。
表3 两种压电定位平台配置下SICM成像性能对比Tab.3 Comparison of imaging quality with different positioner configurations
由表3可知,对于单个大行程压电定位平台配置,随着探针下探速度的增加(30~70 nm/ms),成像的平均像素点成像频率由4.65 Hz增加到9.56 Hz;图像的MSE值增加(189.23~649.67 nm2),平均噪声点数同步增加,说明成像稳定性变差。而采用双压电定位平台时,随着探针的下探速度由60 nm/ms增加到500 nm/ms,成像的平均像素点成像频率由8.32 Hz增加到29.67 Hz;平均MSE值为160.45~250.55 nm2。
使用双压电定位平台获得图像MSE的均值和标准差分别为198.65,37.37 nm2,而使用大行程单定位平台获得图像MSE的均值和标准差分别为388.75,180.36 nm2。后者分别为前者的1.96倍和4.83倍,说明双压电定位平台在提高成像速率的同时重复成像的稳定性优于仅使用单个大行程压电定位平台,从而验证了双压电定位平台高速扫描的优势。
针对传统SICM跳跃模式在高速扫描时存在的探针运动过冲、成像速率慢等问题,本文提出采用双压电纳米定位平台的扫描方法。本文通过串联大行程慢速和小行程快速压电定位平台,使扫描系统兼顾了Z向测量范围和响应快速性的要求。大小双压电定位平台同时工作,使得以跳跃模式扫描时探针能够快速提离样品表面,解决了探针高速下探时的运动过冲问题。针对传统压电作动器输出位移小的问题,本文采用菱形位移放大机构实现位移放大,然后基于解析模型计算了平台的静力学性能参数,并采用有限元方法分析了双压电平台的静/动态特性。最后,加工平台样机并进行了接近曲线和扫描成像的测试。实验结果表明,设计的双压电定位平台在保证成像稳定性的前提下克服了运动过冲、探针下探的速度(至少达到500 nm/ms),有效提高了跳跃模式的成像效率。
光学精密工程2020年10期
1《合作经济与科技》2024年13期
2《婚育与健康》2024年10期
3《思维与智慧·上半月》2024年7期
4《陶瓷科学与艺术》2023年11期
5《中国商人》2024年7期
6《教师博览》2024年4期
7《师道·教研》2024年6期
8《中国对外贸易》2024年6期
9《伴侣》2024年6期
10《经济技术协作信息》2024年6期