双馈感应发电机并网模糊控制系统仿真实验设计
2020-11-20 03:20刁统山张迎春严志国
实验室研究与探索 2020年10期
刁统山, 张迎春, 严志国
(齐鲁工业大学(山东省科学院)a.电气工程与自动化学院;b.工程训练中心,济南250353)
0 引 言
双馈感应发电机(doubly fed induction generator,DFIG)是风力发电系统的核心组成部分。转子侧变换器(rotor-side converter,RSC)和网侧变换器(grid-side converter,GSC)的协同控制涉及电气控制类学生多门专业课的知识。DFIG 并网控制可以锻炼学生运用理论知识来解决工程实际问题的能力。为能够将新工科和科教融合教学理念融入课堂,设计了DFIG 并网运行控制系统的仿真实验[1-2]。通过风电系统并网Matlab数值仿真建模和并网运行动态仿真实验教学,不仅让学生理解DFIG 控制系统的原理和应用,而且可使学生熟悉科学项目研究的流程,提高了学生学习的主动性以达到良好的教学效果[3-4]。DFIG并网运行控制仿真实验分别由DFIG矢量控制原理、DFIG 模糊PI矢量控制系统结构和电压小幅降落时仿真及分析3部分组成。
1 DFIG矢量控制原理
DFIG并网运行结构示意图如图1 所示。系统主要由发电机、RSC、GSC和直流母线电容组成[5]。
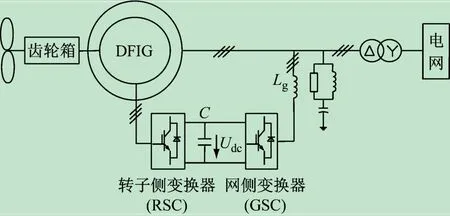
图1 DFIG并网运行结构示意图
要实现DFIG并网运行,必须将DFIG有功和无功功率进行解耦,在建立DFIG 数学模型基础上,利用坐标变换和矢量控制技术可以实现DFIG 有功和无功功率的独立调节[6]。
由于定子磁链不易观测,采用定子电压定向的矢量控制方法[7],定子和转子各量正方向按照电动机惯例选取,并且将定子电压定向于d轴,
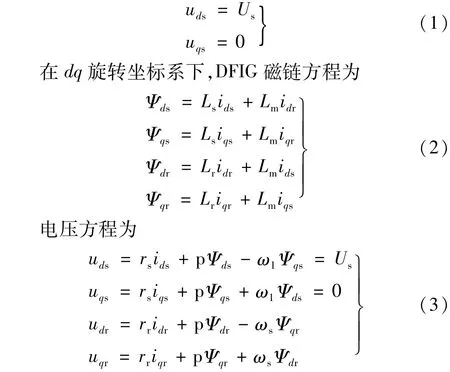
式(1)~(3)中:u、i、Ψ 分别为电压、电流和磁链;r 和L为电阻和电感;Lm为定转子之间的互感;右下标s和r分别为定子和转子分量;右下标d和q分别为d轴和q轴分量;ω1为电网电压同步角速度;ωr= dθr/ dt为转子电角速度;θr为转子的位置角;ωs= ω1- ωr为转差电角速度;Us为定子电压矢量有效值;p为微分算子。
忽略定子绕组电阻,由式(2)、(3)可得简化后磁链、电压方程分别为
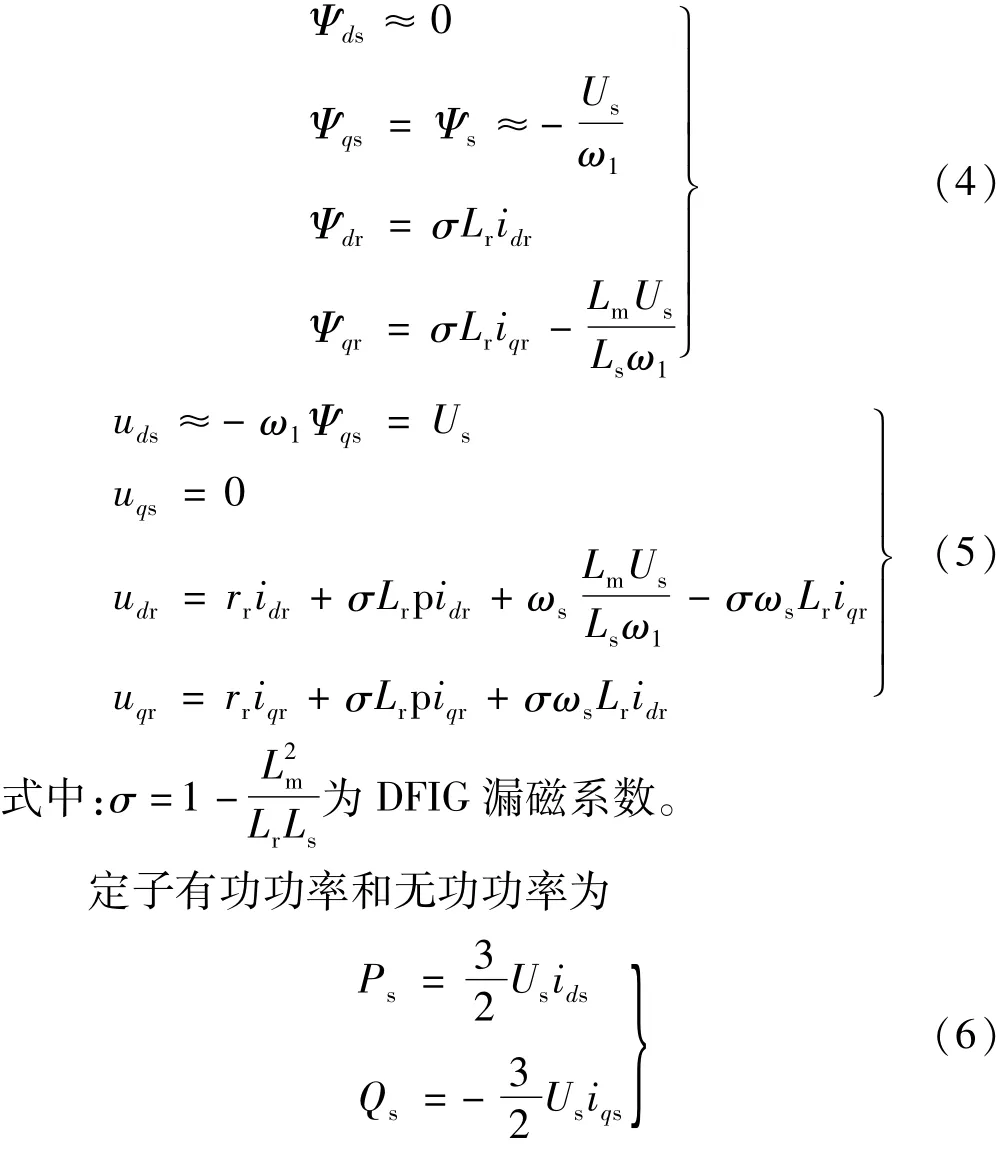
从式(6)得到DFIG 定转子功率解耦表达式。当定子直接与电网连接,即Us的数值保持不变,此时对有功和无功的控制可以解耦为对定子电流的d 轴和q轴的控制。
实际风电机组并网运行过程中机组的转速不断发生变化,RSC从GSC输入的功率也不断变化。负载的变化会引起直流母线电压的波动,影响RSC和GSC的运行性能,进而威胁到整个风电机组的安全运行。因此,必须采取相应的控制措施。
在dq旋转坐标系下GSC数学模型为
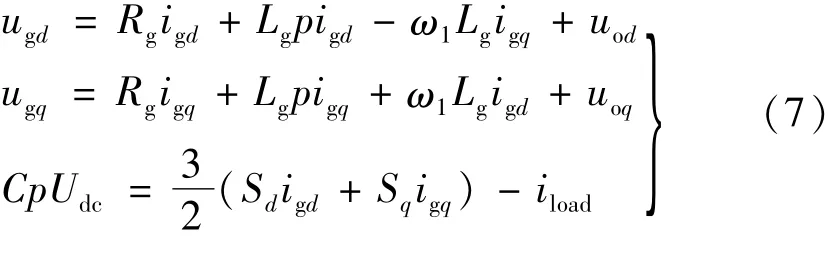
式中:ugd、ugq分别为电网侧d 轴和q 轴方向的电压;igd、igq分别为电网侧d 轴和q 轴方向的电流;uod和uoq为GSC交流侧输出电压的d、q 轴分量;Sd、Sq分别为SVPWM输出d轴和q轴数值。
DFIG并网运行的控制取决于电机轴上输出电磁转矩的动态变化
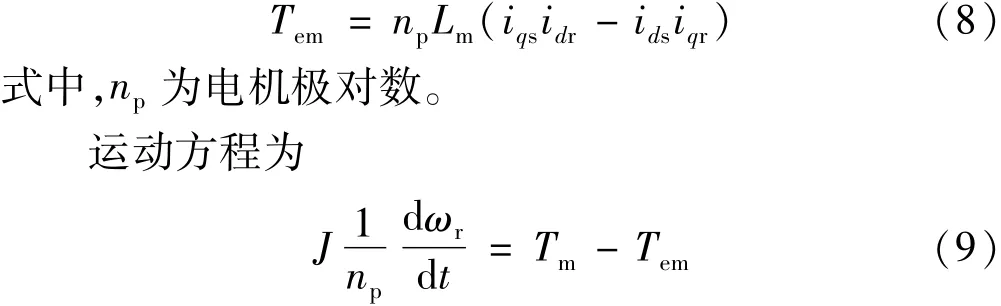
式中:Tm为机械转矩;J为机组的转动惯量。
2 DFIG模糊PI矢量控制系统结构
常规双闭环PI 控制器不能较好地实时跟踪风电系统参数的动态变化,适应性差,而模糊PI 控制器由于鲁棒性强,不需要DFIG 精确的数学模型,可以得到满意的控制效果。模糊PI 控制器原理如图2 所示。根据系统给定电流i*(t)与反馈电流i(t)的偏差e(t)和偏差变化率ec(t)来调节控制器的比例参数ΔkP和积分参数ΔkI,可以使系统具有良好的动态稳定性[8-10]。
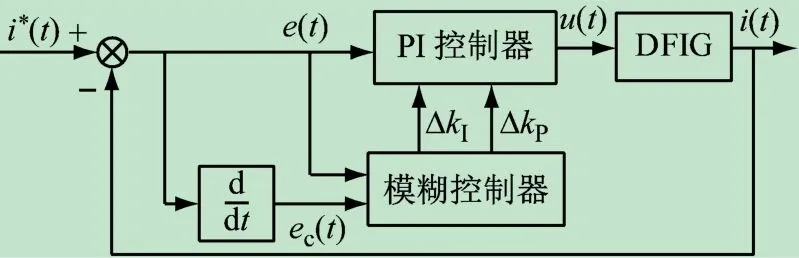
图2 模糊PI控制器原理图
所设计的模糊语言变量集域为[- 3,3]。确定输出变量的适当量化因子和比例因子,使控制器输入、输出变量的理论域落在模糊域{6,- 5,- 4,- 3,- 2,- 1,0,1,2,3,4,5,6},模糊语言变量通常用正大(PB),正中(PM),正小(PS),零(ZO),负小(NS),负中(NM),负大(NB)这7 个语言变量来描述。模糊子集为{NB,NM,NS,ZO,PS,PM,PB}。为保证电网电压下降时发电机输出功率稳定,采用了平滑高斯函数作为隶属函数。根据输出变量的调节要求,分别设置ΔkP和ΔkI两个参数的模糊控制规则见表1、2。采用加权平均法进行解模糊化[11-13]。
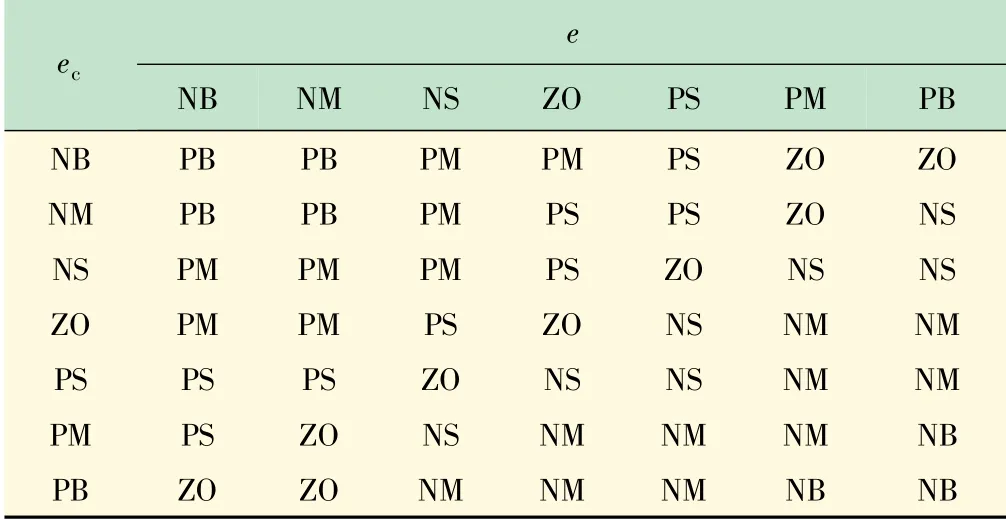
表1 ΔkP 模糊规则
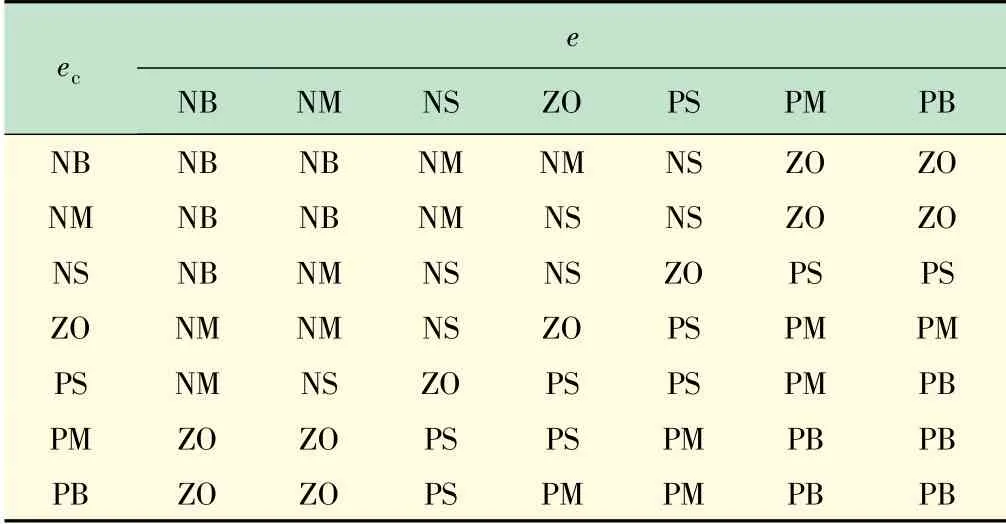
表2 ΔkI 模糊规则
RSC定子电压定向模糊矢量控制系统结构如图3所示。有功功率和无功功率给定值P*和Q*与相应实际测量反馈值P和Q的偏差经过模糊PI功率调节后,输出转子d和q轴电流给定再与相应实际测量值idr和iqr的偏差经过模糊PI 电流调节器,输出转换为给定电压信号,最后经过坐标变换和脉冲调节产生可控开关函数信号Sa、Sb和Sc,RSC根据接收到的开关函数信号采取相应的指令来调节发电机转子绕组电流的相位、幅值或频率。
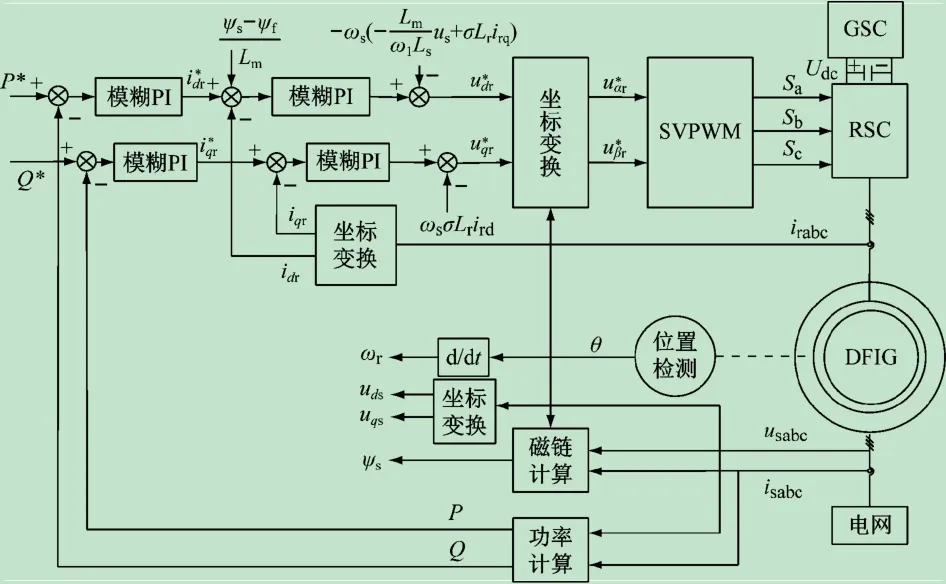
图3 RSC定子电压定向模糊矢量控制系统结构
GSC定子电压定向模糊矢量控制系统结构如图4所示。电压外环控制直流母线电压波动,直流母线电压参考值U*dc和实际测量值Udc的偏差经电压模糊PI调节器调节后,输出有功电流在d 轴指令值与负载反馈电流d轴分量igdL的偏差经电流模糊PI调节器调节后输出电压指令值与igq的偏差经过模糊PI输出u*oq,再经过SVPWM产生可控开关函数信号和Sc,驱动GSC 来控制网侧直流母线电压。采用电流状态反馈实现两轴电流间的解耦控制,同时采用电网电压前馈实现对电网电压扰动的补偿,对负载也相应采用负载电流的前馈控制来实现对负载扰动的补偿[14]。

图4 GSC定子电压定向模糊矢量控制系统结构
3 电压小幅降落时仿真及分析
在Matlab / Simulink中建立了DFIG并网运行仿真模型,当电网电压小幅跌落条件下,分析了DFIG 并网运行控制策略的效果,得到故障期间发电机瞬态电流、功率和直流母线电压波动的曲线。仿真中DFIG 仿真参数如表3 所示。仿真曲线电压、电流和功率均采用标幺值[15-16]。
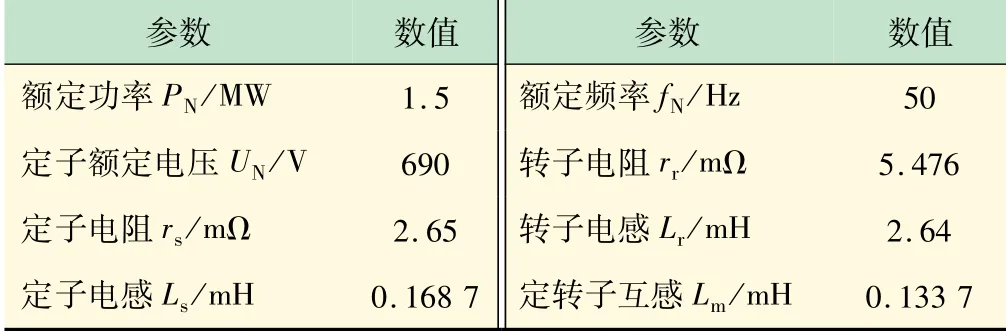
表3 DFIG仿真参数
给定发电机稳定运行t = t1= 1 s,此时电压跌落故障发生,即电网电压标幺值从1.0 (p.u.)突然降到0.85 (p.u.),持续时间Δt = 0.2 s,转速为1.2 (p.u.)。采用定子电压定向矢量控制策略来分析并网瞬态特性。电网电压降低时常规PI 和模糊PI 仿真结果,各物理量的仿真输出曲线波形如图5 所示。
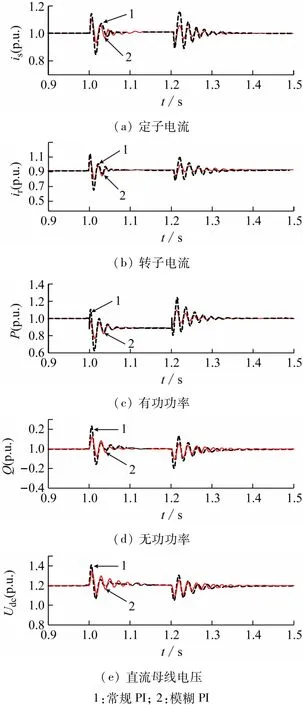
图5 电网电压降低时常规PI和模糊PI仿真结果
由图5(a)、(b)可见,当电压突然降低时,与常规PI控制器相比,模糊PI 控制能够降低定、转子电流波动的时间和幅值,这样就可以减小定子电流波动过大对电网稳定运行的威胁,同时避免了RSC 产生过电流。由图5(c)、(d)可知,模糊PI 控制可以很好抑制有功和无功功率的波动。由图5(e)直流母线电压波动曲线得知,两个控制器的作用效果基本一致。
4 结 语
DFIG并网模糊控制系统仿真实验,能够运用在电气控制类专业本科生“电机学”课程和研究生“电机控制技术”课程的教学。可以让学生充分理解DFIG 定子电压定向基本理论,锻炼学生将模糊控制理论融入常规PI控制策略中,提高学生理论与实践相结合的能力。该实验设计涵盖的学科知识丰富,贴近工程实际且可操作性强,充分调动了学生的积极性,达到较好的实验教学效果。
猜你喜欢
中国特种设备安全(2022年1期)2022-04-26
北京航空航天大学学报(2021年9期)2021-11-02
中学生数理化·高一版(2021年11期)2021-09-05
防爆电机(2021年3期)2021-07-21
上海大中型电机(2021年2期)2021-07-21
防爆电机(2021年1期)2021-03-29
山东电力高等专科学校学报(2019年5期)2019-11-01
课程教育研究·学法教法研究(2018年20期)2018-08-11
自动化与仪表(2018年7期)2018-07-31
中国设备工程(2017年24期)2017-12-28