基于多种保护特征协同与权衡的区域自然保护地网络规划
——以北京为例
2020-11-20 12:49欧小杨
中国园林 2020年10期
欧小杨
王 婧
吴佳霖
郑 曦*
1 背景
生态系统和栖息地的退化是全球范围内普遍存在的过程[1]。人类活动对生态系统的影响,增加了栖息地丧失和物种灭绝速率[2],鉴于人类对生态系统服务(ESs)的依赖[3],生态系统退化不仅带来了自然保护的问题,也将严重威胁人类社会的可持续发展[4]。建立自然保护地是应对上述问题最有效的措施[5]。
理想的自然保护地网络应该对自然保护和人类福祉的多重目标进行制图与整合,关键生态系统服务保护、生物多样性保护与荒野保护等内容应作为自然保护地空间划定的关键要素[6]。在特定的自然保护地网络规划和研究中,体现自然保护地网络的建立目的和选址划界依据、被视为保护重点的实体统称为保护特征(Conservation Features)①[7-8]。在多目标的自然保护地网络规划趋势下,保护特征通常包括以物种、群落和生态系统类型[9]为代表的生物多样性特征和各类型生态系统服务特征。
针对多种保护特征的自然保护地网络规划需要解决的关键问题之一,是确定保护特征的空间分布并划定价值最高且总体保护成本最小的空间格局,最大程度提升保护特征之间的协同[10],降低权衡,以高效的空间划定满足保护目标[11]。目前对于保护特征的评估和空间识别已有物种分布模型[12]、保护优先区分析[13]、生态系统服务制图[14]等方法,而对于自然保护地网络的空间划定,普遍采用的基于垂直生态过程叠加方法[15]虽然能够确定生态系统中总体价值和适宜性较高的区域[16],但不能直接平衡空间上多种保护特征的协同和权衡[17],保护成本较高,有待探索更具全面性和有效性的自然保护地网络规划方法。
过去20年,系统保护规划(SCP)[9]发展为国际上生物多样性保护规划的主流框架[18]。SCP的主要步骤包括保护特征识别、保护目标设定、现有保护地评估、基于空间优化算法的新增保护区域选址、保护地的实施管理与监控等[9]。空间优化算法是SCP的核心技术,采用数学模型根据量化的保护目标、保护成本,保护体系连通性、人为干扰等因素进行空间优化计算[19],在最小的土地利用面积和总体保护成本下实现保护目标,并体现多种保护特征的空间协同与权衡。系统保护规划在自然保护地规划[7]、区域功能区划[20]、生态系统服务热点选取[10]、保护地外围可持续产业规划[21]等领域已有成熟应用。
本文以北京为例,依托系统保护规划框架,应用空间优化算法探讨区域自然保护地网络规划。对生物多样性和生态系统服务特征在保护分区中的分配进行优化布局,以最大限度地提高保护特征之间的协同,同时减少与生物多样性保护不相容的生态系统服务之间的权衡。
2 研究方法
研究基于系统保护规划(SCP)流程,首先选取重要保护特征并进行空间制图;设立每一类保护特征的总体保护目标,确定单一保护特征的优先保护区域并进行空间相关性评价。根据空间相关性,定义不同功能的保护分区,以促进保护特征之间的协同并降低具有冲突的保护特征间的权衡。此后,设计规划情景,确立总体保护目标的分区分配比例,通过空间优化算法生成多情景自然保护地网络规划方案(图1)。
2.1 技术框架
研究采用Marxan with Zones来实现空间优化。该软件是系统保护规划广泛应用的决策支持工具[22]。将量化的保护特征以及保护成本定位在规划单元内,定义保护特征的总体保护目标和在不同规划分区中的分配比例,并根据不同分区的连接度要求定义边界惩罚因子。该软件通过模拟退火算法进行多次迭代运算,每次运算均生成一组目标函数的解,在总体和分区保护目标的限制下,结合概率突跳特性在解空间中逐渐趋近目标函数的全局最优解,对应目标函数最优解的保护分区空间分布,即为某一情景下的自然保护地网络的最优布局(图2)。
2.2 研究区域与规划单元划分
研究区域北京市总面积1.64万km2,生态系统类型多样。山区森林具有丰富的生物多样性资源,并提供调节水文、减缓土壤侵蚀等生态系统服务。随着北京人口迅速增加和建成区快速扩张,生物多样性面临威胁[23],水源涵养、水土保持等生态系统服务功能退化严重[24],亟须优化自然保护地网络空间格局,保证区域生态安全。
研究区域划分为面积为1km2的正六边形规划单元。
2.3 数据采集与现状评价
2.3.1 生物多样性保护特征
研究采用的生物多样性保护特征包括物种和栖息地2个层次。选取北京市的珍稀濒危鸟类分布点位[25],采用Maxent物种分布模型模拟鸟类物种的生态分布范围,作为动物物种多样性特征。由他人研究数据引用植物优先保护地区[26],以优势树种分布作为栖息地类型[27]特征。
2.3.2 生态系统服务(ESs)保护特征
依据生态系统服务通用国际分类(CICES)的调节服务、文化服务和供给服务,参考国内相关评估指标体系[28],结合北京市主要生态系统的功能,选择生态系统碳固定、土壤保持量、水源涵养能力、产水量、作物生产量、娱乐机会6项生态系统服务,进行数据引用[29]和计算。
2.3.3 确定总体保护目标

图1 研究路线
为了保证每种特征在规划的保护地网络中有足够的数量,需要确定总体保护目标。生物多样性特征的总体保护目标主要依据现有分布的普遍性和物种保护等级来确定(表1)。既往研究主要依据经验值设置ESs特征保护目标,由于相关数据缺乏,本研究仅在单一特征的优先保护区域选址中采用30%作为试验目标,在多种保护特征的优先保护分区选址中,分析不同ESs保护目标对结果的影响。
2.4 定义保护分区
2.4.1 保护特征的空间相关性分析
采用Marxan with Zones进行空间优化运算的主要目的在于利用其分区功能,将空间相关性较高的保护特征集中在同一保护分区内,增加保护特征之间的协同,将空间相关性较低的保护特征划分至不同保护分区,减少由于对某种特征的保护导致其他特征的权衡。因此,需要对ESs与生物多样性的热点区域进行空间相关性分析,为保护分区的划定提供支撑。
基于每一类保护特征总体保护目标,分别使用Marxan with Zones对7类保护特征分别进行空间优化运算,确定该保护特征的优先保护区域。对各项ESs与生物多样性的优先保护区域进行网络叠加分析[10],并采用Pearson相关系数校核网络叠加分析的结果。根据空间相关性由高至低将ESs特征分为3组(A组:水源涵养能力、产水量,B组:土壤保持量、生态系统碳固定,C组:作物生产量、娱乐机会),以分配其分区保护目标,这是保证最大协同与减少权衡影响的关键步骤。
2.4.2 定义保护分区的功能
依据空间相关性分析结果、保护特征的主体资源属性及管理目标[30],为研究区域的自然保护地网络预设3个保护分区级别:严格保护区——集中保护生物多样性及与其有最高空间相关性的A组ESs,禁止开发利用;整体保护区——连接严格保护区,主要保护与生物多样性有中等相关性的B组ESs,限制人类活动;协调保护区——保证与生物多样性兼容性低的C组ESs,允许以传统利用方式和游憩活动为主的低强度资源利用活动。此外,设定可持续利用区,包括现状及未来的城市建设用地。
2.5 确定多种保护特征的优先保护分区
2.5.1 设置分区保护目标
在确定各保护特征的总体保护目标和各分区主要功能之后,需要规定保护特征在不同分区内的保护目标,作为Marxan with Zones运算分区空间分布的限制条件。
研究创建3种分区保护目标分配场景——绝对理想的保护场景、严格的保护场景以及开放的保护场景,代表分区保护目标设置允许的资源利用强度(表2)。
场景1将生物多样性特征和A组ESs保护目标完全分配在严格保护区内,B组和C组ESs保护目标分别由整体保护区和协调保护区实现;场景2将一部分生物多样性保护目标纳入整体保护区,允许整体保护区和协调保护区中不同组ESs保护目标共存,形成保护为主的目标分配;场景3代表较高的资源利用需求,为协调保护区分配更多生物多样性和A、B组ESs保护目标。

图2 空间优化算法原理图
2.5.2 保护成本与连接度
研究将人类活动足迹(HFP)[31]作为保护成本,定义与Marxan with zones中的成本(Cost)、分区成本(Zonecost)、边界长度参数(BLM)和分区连接度参数(Zoneboundcost),以控制空间优化算法的选址结果。
2.5.3 ESs目标实现率的敏感性分析
为探究多种保护特征出现权衡的临界条件,评估不同场景对ESs保护目标的实现能力,在保持生物多样性总体保护目标一致的条件下,改变3个场景下每类ESs的总体目标,进行保护目标为10%~80%的保护分区空间优化运算。比较3个场景下各分区的空间分布和保护目标的实现情况。
3 结果
3.1 自然保护地网络保护分区空间分布
不同场景中保护分区的空间分布具有一定的相似性。以ESs总体保护目标35%的选址结果为例(图3-1~3-3),严格保护区集中分布于规划区域北部密云、怀柔、延庆区域;整体保护区主要集中于西部山区,在协调保护区与严格保护区之间形成了连续的斑块;协调保护区主要分布在浅山和山脚平原区域,在整体保护区与城市建设区之间发挥缓冲作用。
对照区域现有自然保护地体系,不少于83.4%(场景3)的现状自然保护区划入严格保护区和整体保护区;密云水库、官厅水库、怀柔水库等重要饮用水源地及周边区域均划入严格保护区;永定河水系、潮白河水系、沙河水系等临近现状城市建设用地的河流水系周边形成了延伸至城市建设区内的保护区域,反映河流廊道较高的生物多样性和生态系统服务保护价值;不少于53.94%(场景3)的森林公园、风景名胜区、地质公园等其他自然保护地划入严格保护区,对应现状自然保护地内保护价值较高的区域。
对比该目标下3个场景所选择保护分区的面积(图3-4),场景1的保护分区的规划单元数量(12 948个)较场景2(12 621个)和场景3(12 639个)更多,说明在相同的总体保护目标下,严格分区目标设置使更多土地被指定为保护分区,而场景2、3由于具有灵活的目标分配,能够实现相对集约的生态保护,可持续利用空间更多。严格保护区面积由场景1~3依次递减,对应规划实施成本的降低;整体保护区在场景2中面积最大,说明该场景中该分区承担较多的保护目标。协调保护区面积在场景1~3依次递增,体现由严格的保护转向控制性资源利用的目标取向。
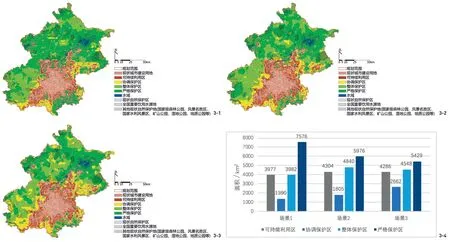
图3 ESs总体保护目标35%的3个场景保护分区空间分布和面积对比
3.2 保护目标实现率的敏感性分析结果
为探究各场景中能够实现的保护目标阈值,分析3个场景ESs总体保护目标为10%~80%时的保护目标实现率。
在场景1中(图4-1),由于保护目标的严格分配,在ESs保护目标为35%以下时能够完成所有保护目标,ESs总体目标的实现能力较低。在多种保护目标出现冲突时,该场景优先保护生物多样性和A组ESs特征。
场景2(图4-2)与场景3(图4-3)均在ESs总体保护目标超过55%后开始出现权衡,说明灵活的分区设置有利于实现更大的保护目标总量。在多种保护特征出现冲突时,场景2优先实现生物多样性和A组ESs的保护,场景3优先实现C组ESs的保护。
4 讨论与结论
4.1 研究意义与创新性
1)提出可操作性强的自然保护地网络空间规划方法。
研究采用的空间优化算法,能够通过保护特征、总体和分区保护目标、保护成本、边界长度等空间分布数据直接反映规划者的要求,确定具有不同生态价值和功能的保护分区,并直观地描述每一次最优解中各保护特征的实现率和保护成本大小。该框架为区域自然保护地网络提供了明晰的空间规划方法,有助于系统整合区域现有各类自然保护地,合理确定适宜的保护区域,建立稳健的规划决策。

表2 3种场景的分区保护目标设定
2)完善空间优化选址算法的应用流程。
采用空间优化算法的既往研究存在的主要问题包括:单一的分区工具未能有效减少权衡[10];依据主观经验判断保护特征之间的相关性[32]。针对上述局限性,研究首先通过定量的空间相关性分析探讨研究区域内各种保护特征存在的协同和权衡作用,划分保护分区并进行空间优化计算,完善既有方法。
4.2 规划场景应指向有针对性的保护措施
研究设置的3种情景反映严格的保护、以保护为主以及保护与资源利用并重的目标取向。结果表明,适度灵活的分区保护目标设置(场景2)能够在较小的土地面积内完成更多保护目标,有效降低保护特征之间的权衡。将一部分生态系统供给服务分配至保护级别最高的严格保护区,符合在保护生物多样性和生态系统服务的同时兼容生产利用的自然保护地规划趋势[33]。
灵活的分区目标设置可能对管理分区的实施带来挑战。例如,将一部分对人类活动和生境退化敏感的生物多样性保护目标分配至管理强度较弱的分区,尽管在理论上能够完成更多的保护目标,但实际保护的有效性可能有所降低;反之,将作物生产、娱乐机会等资源利用强度较高的生态系统服务分配至严格保护区,同样可能对该区的其他保护特征造成威胁。解决以上矛盾的方法之一,是依据目标特点制定具体实施策略,保证自然保护地以保护为主的功能导向,并对保护特征进行后续监测以修正总体和分区保护目标[7]。
4.3 研究存在的问题和未来探索方向
1)保护特征和保护目标量化可能存在偏差。
通过物种分布模型的概率代替实际物种数量,存在一定不确定性,未来应提升数据准确性。此外,未来应针对特定ESs推导合理的保护目标,深入研究区域的生态、社会和经济需求,赋予保护目标更确切的现实意义。
2)对保护成本的衡量较为简单。
研究的保护成本仅以人类活动强度为衡量标准,需要结合实际的区域管理现状,对实际的管理目标以及政策驱动下的管理成本进行确切的考量。

图4 3个场景保护目标实现率随ESs总体保护目标变化的敏感性分析
4.4 结论
目前,实施自然保护地统一设置和分级管理,形成以国家公园为主体的自然保护地体系是自然保护地空间规划的重要趋势。对于已经高度城市化的区域,自然保护地网络规划需要协调保护特征之间的相关性,提升有限空间内自然保护的有效性。研究探讨了依据区域生物多样性和生态系统服务保护特征的空间协同与权衡关系进行优先选址布局的区域自然保护地网络规划方法。结果表明,在严格的保护场景中将保护目标以小部分分配至相邻的分区,有利于提高保护目标实现率和保护特征之间的协同。在具备相关数据的条件下,本研究建立的方法适用于大部分需要依据多种价值进行保护空间优先选址的规划情景,为区域自然保护地网络建设提供了可操作性强的技术手段。
注:文中图片均由作者绘制。
致谢:感谢北京林业大学园林学院提供的支持;感谢北京林业大学自然保护区学院邢韶华老师对数据收集提供的帮助。
注释:
① 部分学者采用conservation targets一词描述该定义,为避免与表示期望的保护地网络的保护水平的目标(target)一词混淆,在本文中均采用“保护特征”进行表述。
猜你喜欢
现代园艺(2022年13期)2022-08-17
旅游学刊(2022年5期)2022-05-31
大众科学(2022年5期)2022-05-18
环球时报(2022-03-29)2022-03-29
生态与农村环境学报(2021年12期)2021-12-30
品牌研究(2021年7期)2021-11-28
世界科学技术-中医药现代化(2021年10期)2021-03-02
先锋(2019年7期)2019-09-09
建材发展导向(2019年11期)2019-08-24
现代园艺(2018年2期)2018-03-15