
一种基于无人机倾斜摄影的隐蔽界址点测量方法
2020-11-09 03:18黄磊彭能舜刘舸
国土资源导刊 2020年3期
黄磊 彭能舜 刘舸

摘 要 立足农村宅基地“房地一体”确权登记工作的现实需求,针对无人机倾斜摄影无法直接测量隐蔽界址点三维坐标的问题,提出一种融合多源数据的无人机倾斜摄影测量隐蔽界址点方法,并对测量成果精度进行检验,结果表明,该方法测制的不动产测绘成果精度符合“农村房地一体”确权登记要求。
关键词 无人机倾斜摄影;房地一体;隐蔽界址点
中图分类号:F301.21 文献标识码:A
文章编号:1672-5603(2020)03-85-4
Abstract: Based on the actual needs of the “integrated housing and land” confirmation and registration of rural homesteads, in view of the problem that drone tilt photography cannot directly measure the 3D coordinates of hidden boundary points, a new type of drone tilt photogrammetry concealment that integrates multi-source data is proposed. Boundary site method and test the accuracy of the measurement results. The results show that the accuracy of the real estate surveying and mapping results measured by this method meets the requirements of “premises integrated measurement”.
Keywords: UAV inclined photogrammetry; integration of housing and land; hidden boundary point
农村房地一体化是指对农村的宅基地和集体建设用地使用权及地上房屋所有权实行统一权籍调查、统一确权登记、统一颁发证书[1]。2019年中央1号文件明确提出“加快推进宅基地使用权确权登记颁证工作,力争2020年基本完成”。农村宅基地“房地一体”确权登记需要测量房屋房角点、绘制全貌宗地图。
随着倾斜摄影测量技术的发展,无人机航测技术在房地一体项目中应用广泛。倾斜摄影三维建模通过二维影像快速生成高精度三维模型,并基于实景三维模型进行地理要素采集,完成房檐改正,房屋层数等属性录入,输出可用于确权的二维矢量数字线划地图。无人机倾斜摄影能快速有效地的获取测区内多视角影像[2],通过三维重建等技术手段,快速开展大比例尺测图工作,该技术在非隐蔽界址点测量中的精度表现良好[2-4]。
农村宅基地“房地一体”确权登记中不动产测绘任务重、时间短,传统测量技术成本高、投入大,且工期难以保障。使用无人机倾斜摄影测量能有效地提高工作效率。然而,无人机倾斜摄影在对房屋周围栽种有高大树木中的隐蔽界址点测量中受到很大的制约。如图1所示,由于该房屋A和B两个界址点被树木遮挡(即隐蔽界址点),传统倾斜摄影三维测图无法测定这两个界址点三维坐标。基于此,本文以无人机倾斜摄影数据为基础,融合中小比例尺线划图、权籍调查结果中实测房屋边长数据等,提出一种融合多源数据的无人机倾斜摄影测量隐蔽界址点方法,并对测量成果精度进行检验,检验该方法的可靠性。
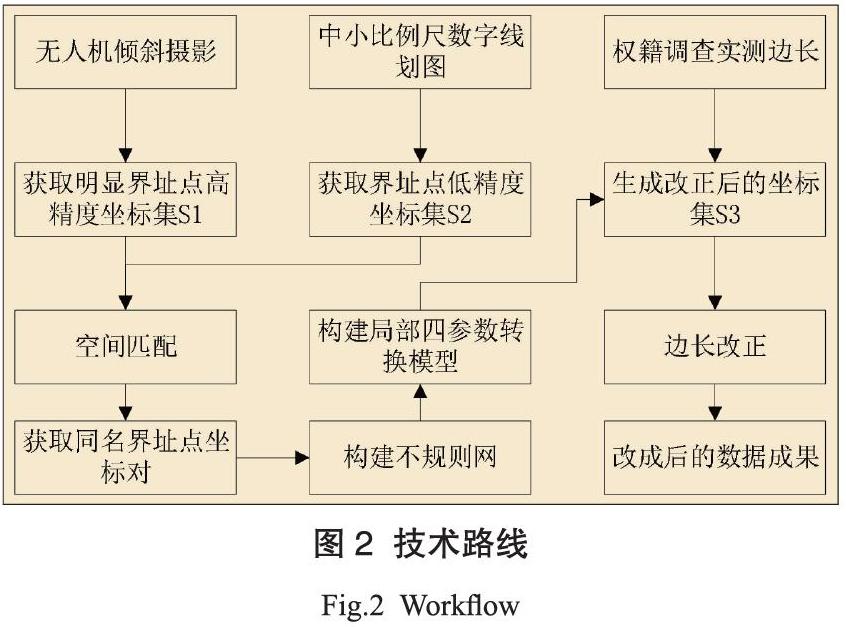
1 技术路线
通过无人机倾斜摄影测量,利用三维测图软件获取的第i幢隐蔽房屋的明显界址点(房角点)高精度坐标集S1i,i=1,...,N;从中小比例尺数字线划图中提取的每j幢隐蔽房屋界址点低精度坐标集S2j,j=1,...,M;通过空间叠加与匹配,获取同名界址点坐标对中S1i中的坐标{xi,yi};以同名界址点坐标对{xi,yi}为顶点,构建不规则三角网,优化不规则三角网,确保每一幢房屋落在在某个三角网内部;构建每个三角网4参数坐标转换模型;对隐蔽界址点的坐标进行改正S3;利用权籍调查实测边长,改正每一幢房屋边长,如图2所示。
2 无人机倾斜摄影获取明显界址点
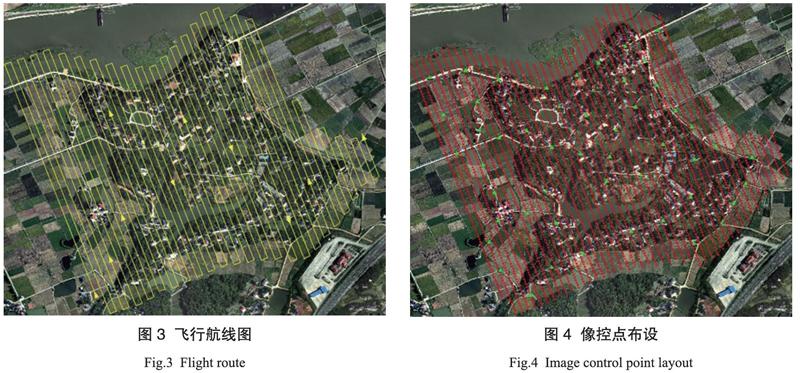
为了获取高精度明显界址点坐标,无人机倾斜摄影方式获取地面分辨率为0.015m倾斜影像,每100m布设一个像控点,如圖3所示的飞行航线,如图4所示像控点布设。采用Smart3D构建三维实景模型,如图5所示的三角网模型,如6所示的三维实景模型。在3Dmapper中加载实景三维数据,采集明显界址点坐标,其中第宗宗地明显界址点坐标集合。
3 同名界址点匹配
以“房地一体”确权登记中1:2000数字线划图房屋角点作为界址点低精度坐标集S2。将采集的明显界址点成果叠加在1:2000数字线划图上,先用要素对象匹配,获取每一要素的明显界址点坐标自集,通过缓冲分析、空间叠加等方法实现;然后再通过最近邻分析方法匹配同名界址点,获取同名界址点坐标对。其中最近邻分析方法匹配过程如下:
第一步,计算中第m个点和中n个点的欧式距离;第二步,按照中第m个点到所有个点距离的递增关系排序;第三步,存在中的第宗地的界址点与第宗宗地坐标集合中第m个点的距离最小。重复上述步骤,得到找出中每个点在第宗地中的中最邻近点。得到界址点对,其中。
4 构建局部四参数模型
根据“房地一体”确权登记工作中的宗地全貌图,构建局部同名界址点集,确保每个局部同名界址点集合不少于5对坐标[5]。利用局部同名界址点对构造4参数坐标转换模型,其公式如下:
其中,是中的坐标,是中的坐标,是平移参数,是缩放因子,是旋转参数,是旋转参数的余弦值,是旋转参数的正弦值。利用最小二乘法构建第宗宗地的4参数坐标转换模型。将与之相对应第宗地坐标集合中的坐标转换为改正后的宗地坐标集合。
5 边长改正
根据“房地一体”确权登记工作中权籍调查要求对每一幢房屋进行边长实测,要求各条界址点至少丈量一條其界址点与邻近地物的相关距离或条件距离,同时要求一定误差范围内在不动产房角点之间的边长相对精度能达到标准要求,其边长精度优于0.03m。将权籍调查中边长改正后的工作底图与改正后的宗地坐标集合S3套合,对S3进行边长改正,生成改成后的数据成果S4。
6 试验及精度分析
6.1 试验验证
本文以长沙市望城区徐家桥社区为实验测区。该测区占地5.5km2,测区地势平坦,由于望城区的农村个人建房文件的规定,测区内无高层建筑。利用无人机倾斜摄影测量技术获取测区的三维模型,通过三维模型得到房屋界址点的坐标;通过中小比例尺数字线划图得到不精确的坐标,本文采用的是1:2000数字线划图;最后这两套坐标建立起局部4参数转换坐标系,经过外业丈量边长改正得到最终结果。
6.2 精度分析
本文用GPS-RTK和全站仪的测量结果作为真值来进行检测,三维建模点位的几何精度见表1。可以看出经过改正的隐蔽界址点的精度得到提升,同时满足解析法的精度要求。
利用本文算法进行隐蔽界址点的坐标改正,其平面最大误差从0.350m降低至0.097m,中误差从0.176m降低至0.034m,完全满足《房产测量规范》中二类界址点等级的精度要求。
7 结论
本文基于倾斜摄影测量技术,利用3DMapper软件,经过倾斜影像生成三维模型,利用三维模型提取明显界址点。结合图解法采集到的相对精度高的界址点,通过4参数转换的改正图解法的界址点,将图解法的界址点获得绝对位置。结合房地一体项目的特点,该方法适合于提高了无人机倾斜摄影测量技术提取隐蔽界址点的精度。同时保证了采用无人机倾斜摄影测量技术构成三维模型成本低,周期短且精度高的特点。
参考文献/References
[1]向乾勇.对农村宅基地“三权分置”改革试点的思考-以娄底市为例[J].国土资源导刊,2019,16(01):1-5.
[2]吴锦发. 无人机数码航空摄影在两违监控中的应用[J]. 测绘与空间地理信息, 2015, 38(4): 198-200.
[3]宋亮.基于无人机倾斜摄影测量的房地一体测量分析[J].江西建材,2020(05):82-84.
[4]吴现兴.无人机摄影测量及数据处理技术在地质灾害应急调查中的应用-以娄底市娄星区杉山镇同安村滑坡为例[J].国土资源导刊,2019,16(04):65-68.
[5]李潇,尹晖.基于最小二乘配置的三维空间坐标转换[J].测绘工程,2008(02):16-18+29.
