性能加热器内部逻辑分析及改进意见
2020-11-09 03:14刘晟
科技创新与应用 2020年32期
刘晟

摘 要:9F燃机系统中,天然气前置模块内的性能加热器设备,对DLN内燃烧稳定至关重要。若燃料气热值与比重发生变化,经过换热器后的气体温度也会发生变化,为了保证韦伯指数变化率在5%之内,就需要对性能加热器温度调节阀精确控制。
关键词:燃气热值;韦伯指数;温度调节
中图分类号:TM621 文献标志码:A 文章编号:2095-2945(2020)32-0109-02
Abstract: In the 9F gas turbine system, the performance heater equipment in the natural gas prepositive module is very important to the DLN internal combustion stability. If the heat value and specific gravity of the fuel gas change, the gas temperature after the heat exchanger will also change. In order to ensure that the Weber Index change rate within 5%, it is necessary to accurately control the temperature control valve of the performance heater.
Keywords: heat value; Weber Index; temperature control
9F燃气轮机中,燃料气温度是影响燃烧方式的重要参数,只有预先将天然气温度提高使之满足切换条件,燃机在燃烧模式切换过程中才能缩短等待时间,为了进一步提高天然气温度控制的自动化程度,某燃机电厂生计部、热控班做了大量细致的研究。
针对性能加热器以往常发生超温跳闸的故障,查找历年跳机事故,可以发现导致性能加热器跳闸的主要原因如下:
(1)加热器水位高LSHH4222A,LSHH4222B,LSHH4222C,信号三选二。
(2)两个中压给水泵都停止运行延时35s跳闸。
(3)天然气出口温度>193℃,延时30s跳闸。
(4)性能加热器所在MCC柜电源开关跳闸。
(5)如果检测到水管存在泄漏,加热器跳闸,并报警。
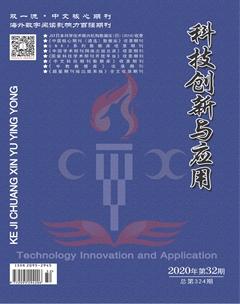
打开性能加热器内部控制逻辑图,如图1所示。
性能加热器投入运行的允许信号SP取决于SP1(端差控制设定值)、SP2(正常运行设定值)、SP3(最小开度和最大开度设定),三者之间的最小值。
三者动作逻辑为:
SP1:进水温度(TE4210)和性能加热器天然气出口温度(TE4223)之差控制在25℃以内,防止两台中压给水泵均停役,造成管道内无流量。
SP2:如果天然气出口温度设定值大于52℃,燃气轮机透平内部逻辑允许,性能加热器投入。
SP3:如果发生甩负荷,SP3在15s内设定为SP1和SP2的最小限制值,然后恢复到100%。
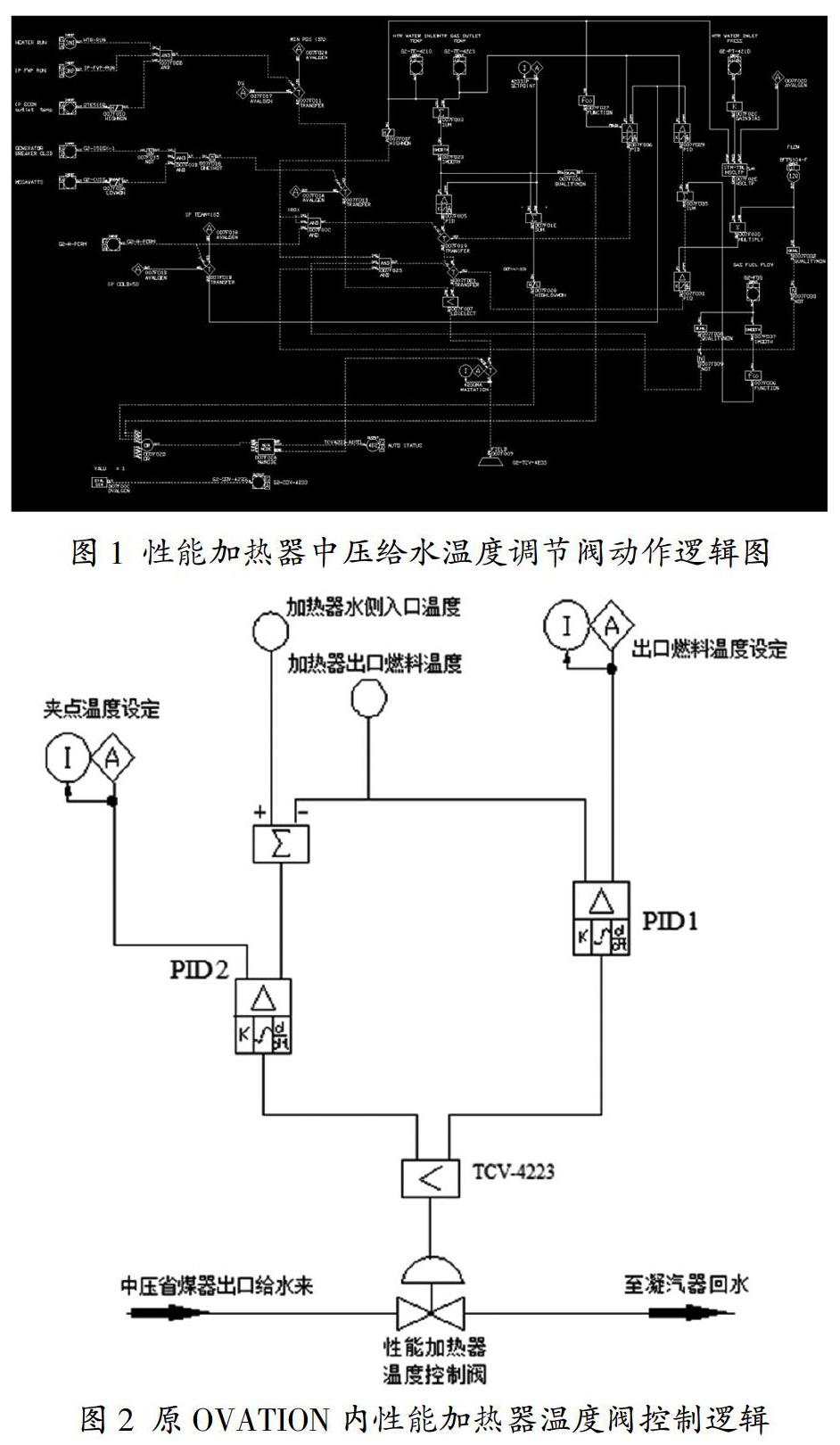
性能加热器温控阀的动作逻辑,如图2所示。
从图2中可知,通过将加热器入口水温与出口燃料气温度的差值输入PID1,和其原设定值进行比较运算。PID2的作用是将热电偶测得的出口燃料温度与其原设定值185℃进行比较运算。PID1与PID2运算出的结果取小的那个值,用于调节温控阀的开度。在启机过程中,加热器入口水温一般情况下低于200℃,PID1起作用;正常运行入口水温高于220℃后,PID2调节器起作用。若按图2所示的简单控制回路,在启机过程中,运行工况突发变化后,入口水温就不可能恒定,有时波动范围可以达到30℃,等加热器出口燃料气温发生变化后,再通过PID1来调节温控阀改变给水流量,其迟延特性更加明显,很容易引起调节过程的震荡,因此这样的调节是不可靠的。在2017年4月18日,某燃机电厂1号燃机即将结束启动过程时,就发生了水温的突变致使出口燃料气温度高于193℃,30s后给水的温度调节阀仍不能修正到正确开度,导致该发电机组解列,机组甩负荷至全速空载。由于原设计没有考虑到该类情况,所以在2018年5月技改之前发生的概率是很高的,为了进一步控制住加热器出口的燃气温度,使得性能加热器中压给水温度控制阀调整更灵敏,该电厂在OVATION系统内,对其温控阀的控制逻辑作出改动。
由于入口水温的变化实际上是流经性能加热器的水焓值产生了变化。而在稳定工况下,机组所需天然气量基本不变,只要加热器入口燃气温度不变,则将其加热到185℃所需的焓值就应该不变即燃料气焓升基本恒定。该燃机电厂热控部经研究后认为增加一只PID的调节器,命名为PID3,通过性能加热器进口给水,出口排水的压力、温度、流量这些数据,精确算出性能加热器进水焓值差,与天然气的焓值增加量进行比较,最终确定进水温控阀的开度,它的作用相当于增加了一个阀门动作的提前量,改变其调节特性,避免因温控阀调节迟滞导致的天然气超温,进而防止性能加热器频繁跳闸,避免机组快速减负荷情况的出现。具体逻辑图见图3。
從图3可以看出, PID2的功能没有改变,由于增加了PID3,相当于引入了燃料气流量变化引起的焓升⊿H1、给水焓降⊿H2两个变量(此设计考虑到了机组负荷对该温控阀的影响)。这样在稳定工况下,当热水温度变化时,水的焓值也会发生变化,PID3随之改变,温度调节阀也跟着发生变化。相比原先的设计温控阀的调节有了提前量,减少了给水温突变带来的控制滞后。
小结
技改结束之后,经过长期运行发现,性能加热器出口天然气温度变化变小,阀位的调节幅度也大为减少,目前燃机所需燃料气温度基本实现可控,应该说增加的PID3控制是成功的。这对接下去热工控制人员如何更精确的测量出加热器进、出口燃料气的热值变化,换算成焓值的上升量对温控阀的控制精度会很有帮助。如此进入性能加热器的给水流量也能更精确。可以说该项目作为一项创新已经取得了良好的效果,值得同类型机组参考借鉴。
参考文献:
[1]戴云飞,周珏.新一代燃气轮机控制系统-MarkⅥ介绍[J].燃气轮机技术,2004(12):29-32.
[2]李勇辉,吴梅.GE燃机MARKVI:控制系统与DCS通讯故障分析[J].工业控制计算机,2007(08):81-82.
[3]何震.9FA燃机静态变频器控制系统及调试运行[J].上海电力,2007(04):409-412.