语音示教+自主巡航智能垃圾分类机器人的研究与设计武
2020-11-09 03:14张静刘敏史禹龙曹泽
科技创新与应用 2020年32期
张静 刘敏 史禹龙 曹泽
摘 要:制造一种能够语音示教,并能够自主巡航的智能垃圾分类机器人。该机器人可以通过CNN来识别各种垃圾,结合其他传感器提高识别准确率,并分类投放到相应的垃圾桶内,还可以通过屏幕和语音反馈给用户。该机器人可以通过双目视觉和超声波测距模块,绘制环境地图,进行避障和规划巡航路线。另外可以加入NLP,可实现语音控制。使用Google开源的神经网络框架Tensorflow搭建卷积神经网络进行图像识别。采用ReLU作为激活函数,能在反向传播时避免梯度消失。从测试结果来看,目前大部分垃圾的识别准确率在80%左右。
关键词:CNN;双目视觉;ReLU
中图分类号:TP242 文献标志码:A 文章编号:2095-2945(2020)32-0043-03
Abstract: An intelligent garbage sorting robot which can instruct by speech and cruise autonomously is manufactured. The robot can identify all kinds of garbage through CNN (convolutional neural network), improve the recognition accuracy by combining with other sensors, classify and put into the corresponding garbage can, and also give feedback to users through screen and voice, telling them what kind of garbage they put in. The robot can use binocular vision and ultrasonic ranging modules to map the environment, avoid obstacles and plan cruise routes. In addition, NLP (natural language processing) can be added to achieve voice control. Google's open source neural network framework Tensorflow is used to build a convolutional neural network for image recognition. The ReLU (Rectified Linear Unit) can be used as the activation function so as accelerate the learning speed of neural network and avoid the disappearance of gradient in back propagation. According to the test results, most of the garbage currently has an accuracy rate of around 80%.
Keywords: CNN (convolutional neural network); binocular vision; ReLU (Rectified Linear Unit)
引言
随着我国经济的快速发展,城市化进程逐步加快,人民生活水平日益提高。为了满足人民日益增长的生活需求,各种多元化的商品及生活用品蜂拥而至。随之而来的是日益增多的生活垃圾,对环境造成了极大的压力,有些城市已经出现了垃圾围城的现象。很显然,垃圾分类已成为我国需要解决的迫在眉睫的问题。目前随着国家政策的大力支持,部分城市的垃圾分类得到了有效的改善,但工作量较大,普遍推广及正确分类有相当难度。因此有必要研究生活垃圾分類投放智能化机器人,以适应和满足居民垃圾分类投放和监管部门管理需要。
1 智能化技术路线和方案比选
1.1 智能垃圾分类机器人研究现状
1.1.1 国内研究现状
(1)ABB人工智能垃圾分类机器人
这一集机器人自动化、人工智能与云计算软硬件技术为一体的解决方案,可实现云、边、端协同的完整闭环,通过深度学习分类算法以及ABB独有的PickMaster系统实现了对输送链的无缝精准跟踪,并由协作机器人YuMi完成最终的分拣。整个过程的运行数据及设备信息实时上传至云端,在ABB AbilityTM应用中进一步分析及优化。
(2)弓叶科技人工智能
弓叶科技的人工智能垃圾分拣机器人每分钟可以分拣70多件物品,可以7天*24小时连续不断地工作,并大大减少因为疲劳造成的人工分拣误差。
弓叶科技自主开发的人工智能软件与高速分拣机器人相结合,同时,机器人代替了工人的双手。人工智能算法通过海量的图像对机器人进行训练,无论废弃物是否完好无损、是否有凹痕、是否被压碎、是否被扭曲、是否被部分遮挡等各种状态之下,机器人都可以识别,并且从传送带上准确地抓取要回收的物料,投放到相对应的料框中。只要是人的眼睛能一眼就识别的东西,弓叶科技的人工智能都能识别。不仅如此,弓叶科技的人工智能还具有强大的迁徙学习能力。例如,部署在北京爱分类的机器人可以向部署在全国各地不同的机器人学习,机器人与机器人之间还可以互相继承废弃物识别的经验。
1.1.2 国外研究现状
(1)芬兰:ZenRobotics回收机
这款基于视觉判断的垃圾分类机器人的机器臂臂展长达2米,通过激光扫描系统,能够提前扫描运输带上的物品并且将它们进行分类,然后通过机械臂将垃圾分类。
(2)日本:FANUC分拣机器人
利用视觉分析系统对物品进行跟踪和分类,但它有废旧物品自动回收技术。这套技术允许机器人对物品的化学成分以及形状进行实时扫描和分析,同时也使机器人能够实时指定抓取方式和抓取顺序。
(3)美国:Rocycle机器人
使用了触觉作为检验材料的方法,通过触摸的方式区分纸张、金属和塑料。在分选过程中,机器人会对物体进行扫描,并通过传感器测量物体尺寸。使用其机械手臂上的两根柔软手指挤压物体以完成抓取,而手指上的压力传感器能够测量抓住物体所需要的力,并以此确定材料刚度。最后,将扫描结果与压力传感器获得的数据相互对比匹配,分辨出物体材质后,将其投入正确的垃圾箱。
1.2 主要技术路线
首先,我们要有一双“眼睛”,视觉识别系统,利用高清照相机去扫描,识别传送带上的物品。然后,识别的数据可以收集起来给机器人大脑积累“经验”,前期先通过训练机器人,使机器人的大脑认识这些来料,慢慢的拥有类似于人的自主判断能力。最后,传达“信息”给机器人去快速识别混合垃圾中的可回收物和杂质,准确抓取并投放到对应的料框中完成分类。机械臂作为可执行单位,将垃圾分类到不同的垃圾桶里。
1.3 技术方案
对抓取和投放的单块垃圾会被送入小型识别仓,进行识别后通过机械杆推入相应垃圾桶内,一次识别一个垃圾,然后进行下一次识别。
桶内垃圾满后,通过程序内建的地图能自动巡航至垃圾站进行卸货,把已满的垃圾桶交付给一个小型的倾倒装置,然后换上空的垃圾桶继续工作。
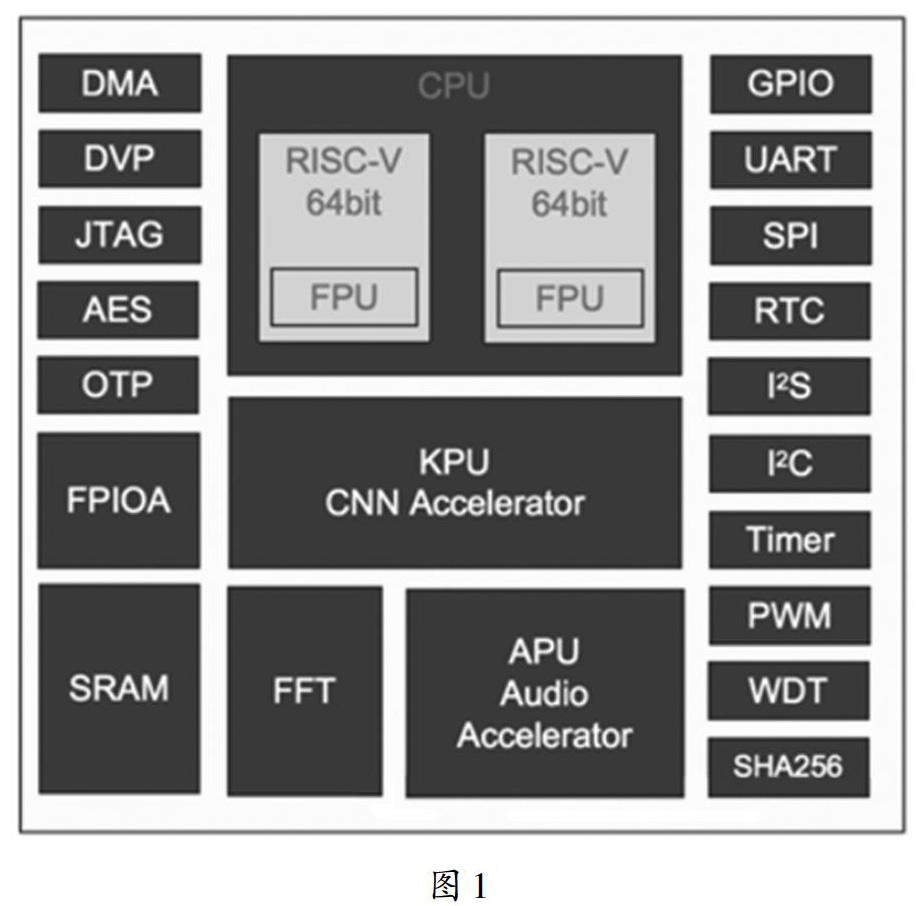
(1)硬件(见图1):
处理器使用k210,该处理器成本不高,性能不差,功耗不高,是处理器优点的集大成者,而且特别适合人工智能硬件开发,内置独立的CNN卷积神经网络运算单元,有单独处理快速傅里叶变换的FFT运算单元,内置APU,主频可达到600MHz,可使用常用的深度学习框架,自带麦克风阵列,支持语音识别,支持多种外设通讯方式。
(2)程序:
识别方面:使用大量单个垃圾的图片集,对神经网络进行训练,提高准确率,当投放使用后有识别不了的垃圾被人工远程辅助识别从而提高识别率。
巡航方面:对特定新场景使用超声波测距和双目测距进行快速建模,并将地图储存,通过特定算法自动分配巡航路线。随时检测硬件状态,电量过低会自行巡航至充电桩充电。
2 智能分类机器人的系统结构及功能
2.1 系统结构
依托于AI系统的人机互动模式、声波雷达、北斗导航等系统具有语音示教和自主巡航功能的智能垃圾分类机器人。
2.2 系统功能
本项目机器人主要在公共场合运行,可以识别地面的垃圾并将其自动分类投放到自身携带的弹夹式垃圾桶内,并可接收行人直接投放垃圾,等某一垃圾桶满后会自动巡航至垃圾站,对携带的垃圾筒进行“换弹”。
采用动态值班式工作模式,一部分分散固定在公共场所内,另一部分采用流动岗,根据正在运行机器人的数量进行动态调整。
可以使用语音对其控制,并可遥控,还可以远程通过客户端检查分类效果和远程辅助分类,对无法识别的垃圾进行人工识别,并反馈給神经网络,提高识别准确率。
3 智能分类机器人应用于市场的深远影响及意义
人工智能垃圾分拣机器人每分钟可以分拣70多件物品,速度大约是普通人的两倍,机器人还可以7天*24小时连续不断地工作,而工人是没办法承受这么高强度的劳动。有了这些智能机器人的帮助,我们相信,未来废弃物回收工作将完全有可能实现无人化,从而解决了垃圾分拣中心长期存在的人员短缺问题,并大大减少因为疲劳造成的人工分拣误差。
依托于AI系统的人机互动模式、声波雷达、北斗导航等系统具有语音示教和自主巡航功能的智能垃圾分类机器人,其特征在于:包括智能机器人、垃圾箱和垃圾桶,垃圾箱通过螺栓安装在智能机器人的两侧,垃圾桶设置在垃圾箱的内侧,底部安装有滚轮。智能机器人的底部粘接有定位板,安装有显示器、红外探测器、距离探测器、垃圾扫描仪等,并且通过大数据对机器人进行训练,让机器人具有类似于人脑的判断能力,同时,机器人代替了工人的双手。人工智能算法通过海量的图像对机器人进行训练,无论废弃物是否完好无损、是否有凹痕、是否被压碎、是否被扭曲、是否被部分遮挡等各种状态之下,机器人都可以识别,并且从传送带上准确地抓取要回收的物料,投放到相对应的料框中。只要是人的眼睛能一眼就识别的东西,智能机器人就都能识别,从而对废弃物进行快速准确识别、拾取和分类。
4 结束语
我国环保产业正处在转变发展方式、优化工艺流程的转型期,迫切需要新一代人工智能等重大创新添薪续力,从而推动传统的机械物理化处理模式向数字化、智能化、网络化的处理模式转变。接下来的时代,是知识驱动的时代。人工智能技术的发展,尤其是目前深度学习技术的发展,给了我们一个前所未有的能力,就是机器可以自动学习特征表达的能力。这是一个跨时代的变革。我们很高兴有像弓叶科技这样的人工智能公司正在关注环保行业,关注垃圾处理,用新一代人工智能技术和一个又一个成功的案例推动我们国家垃圾处理模式的变革。
参考文献:
[1]宁凯,张东波,印峰,等.基于视觉感知的智能扫地机器人的垃圾检测与分类[J].中国图象图形学报,2019,24(08):1358-1368.
[2]郭兴旺,管和清,刘颖韬,等.半透明材料红外热像检测的光谱特性和光源选择[J].红外与激光工程,2017,46(01):59-67.
[3]李文仲,段朝玉.短距离无线数据通信入门与实战[M].北京航空航天大学出版社,2006.
[4]丁明华,李允旺,王勇.基于Unity3d的麦克纳姆轮移动平台避障算法仿真[J].中国科技论文,2016(10):1191-1195.
[5]傅忠云,朱海霞,孙金秋,等.基于惯性传感器MPU6050的滤波算法研究[J].压电与声光,2015,37(05):821-825+829.
[6]周立辉,张永生,孙勇,等.智能变电站巡检机器人研制及应用[J].电力系统自动化,2011,35(19):85-88+96.