手部多关节功能康复设备电气控制系统的设计
2020-11-09 03:14班戈刘志峰胡慧敏
科技创新与应用 2020年32期
班戈 刘志峰 胡慧敏
摘 要:基于对手部手指关节的屈伸、腕关节的弯曲运动功能的分析,设计了手部多关节功能康复设备电气控制系统,该系统实现了脑卒中引起的上肢肌无力患者手部多关节在一定角度范围内做屈曲和拉伸康复训练的同时还可以对其前臂屈肌群和伸肌群做辅助按压式按摩康复。该系统具有功耗低,噪音小,体积小的特点。
关键词:康复训练;单片机;电磁阀;屈伸
中图分类号:TH772.2 文献标志码:A 文章编号:2095-2945(2020)32-0037-02
Abstract: Based on the analysis of flexion and extension of finger joints and flexion of wrist joints, this paper designs an electrical control system of hand multi-joint rehabilitation equipment, which achieves the function of rehabilitation training of flexion and stretching of multiple joints of the hand in patients with upper limb muscle weakness caused by stroke, and at the same time facilitates the assistant compression massage rehabilitation of flexor and extensor muscles of the forearm. The system has the characteristics of low power consumption, low noise and small volume.
Keywords: rehabilitation training; single chip computer; solenoid valve; flexion and stretching
1 概述
脑卒中是一种突发的脑血液循环障碍性疾病。据统计,我国脑卒中患者高发,每年新生增长率呈上升趋势,且脑卒中后约有85%的患者伴有上肢功能损伤。主要临床表现为10%手部首先受累,肢体无力,晨起关节无僵硬。所以如不在早期及时康复治疗将导致严重后果。而手部运动功能的复健、恢复是偏瘫康复难题之一[1-3]。对于手部无力的患者,首先应该进行被动康复训练和肢体功能性按摩。通过研制相应的手部康复训练设备不但可以帮助脑卒中引起的对侧或双侧上肢肌无力患者进行康复训练还可以减轻医护人员或家庭成员的工作负担。
基于对手部关节的屈伸、腕关节的弯曲运动功能的分析,设计了一种集手部多关节被动训练和前臂肌肉按压式康复设备控制系统。
2 系统设计
手部多关节功能康复设备电气控制系统由手部多关节屈伸训练模块和前臂肌肉按压式按摩模块组成。
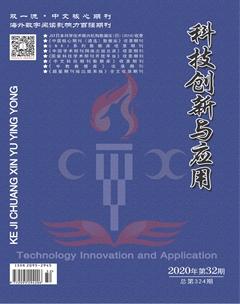
2.1 手部多关节屈伸训练模块设计
通过AT89C51单片机电路程序设计实现步进电机正反转,电机转速的控制和调节,电机转动角度可根据实际康复训练需要进行调节设定;采用数码管显示电机角度、速度,并显示训练时间。整个装置由晶体振荡电路、复位电路、显示电路、步进电机驱动电路按键模块等组成。电机驱动选择具有高压、大电流双H桥式驱动器的L298、锁存器选用74LS373。
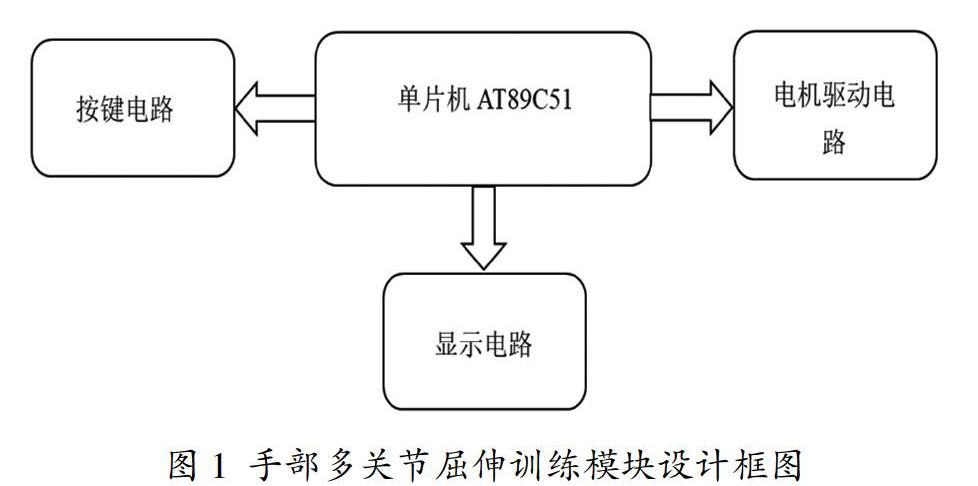
手部多关节屈伸训练模块整体电路设计如图2所示,选用芯片L298作用直流电机驱动带动手指多关节的伸展和屈曲,按键电路对直流电机的正反转、加速减速、开始、停止进行控制。通过系统编程,L298芯片驱动步进电机正反转动,可根据自身实际训练情况进行转动角度(10°、20°、30°、40°、50°)、转动速度(1-5挡,1挡最慢、5挡最快)的设定,并实现训练开始时数码管显示康复训练时间。
2.2 小臂肌肉按压式按摩模块设计
前臂按压式按摩装置模块由电源控制中心、气泵控制电路、电磁阀控制线路组成。
电源控制中心采用单片机STC89C52RD,该电源控制中心为充气泵和电磁阀提供工作需要的电压及电流。电源控制中心使用DC12V,2A的开关电源供电,使用电源稳压芯片7805将电源电压稳定到5V给STC89C52RD单片机供电。
气泵控制电路由单片机输出信号控制继电器的开关,在这个系统中,通过对电磁阀的控制为两组条形气囊充气,气泵控制电路的额定电压设为直流电12V。
选用型号为LY370APM的气泵,该气泵单位时间内的空气流量大,每秒的充气量30ml,充气速度快[4],符合智能前臂肌肉按压式按摩装置的充气需求,其额定电流是200mA。
电磁阀控制线路与气泵控制电路的工作方式相同,由单片机来控制电磁阀的开关,在气泵为两组组条形气囊充气的同时,控制条形气囊的充气、放气顺序,电磁阀额定工作电压与气泵额定工作电压相同,均为直流电12V。
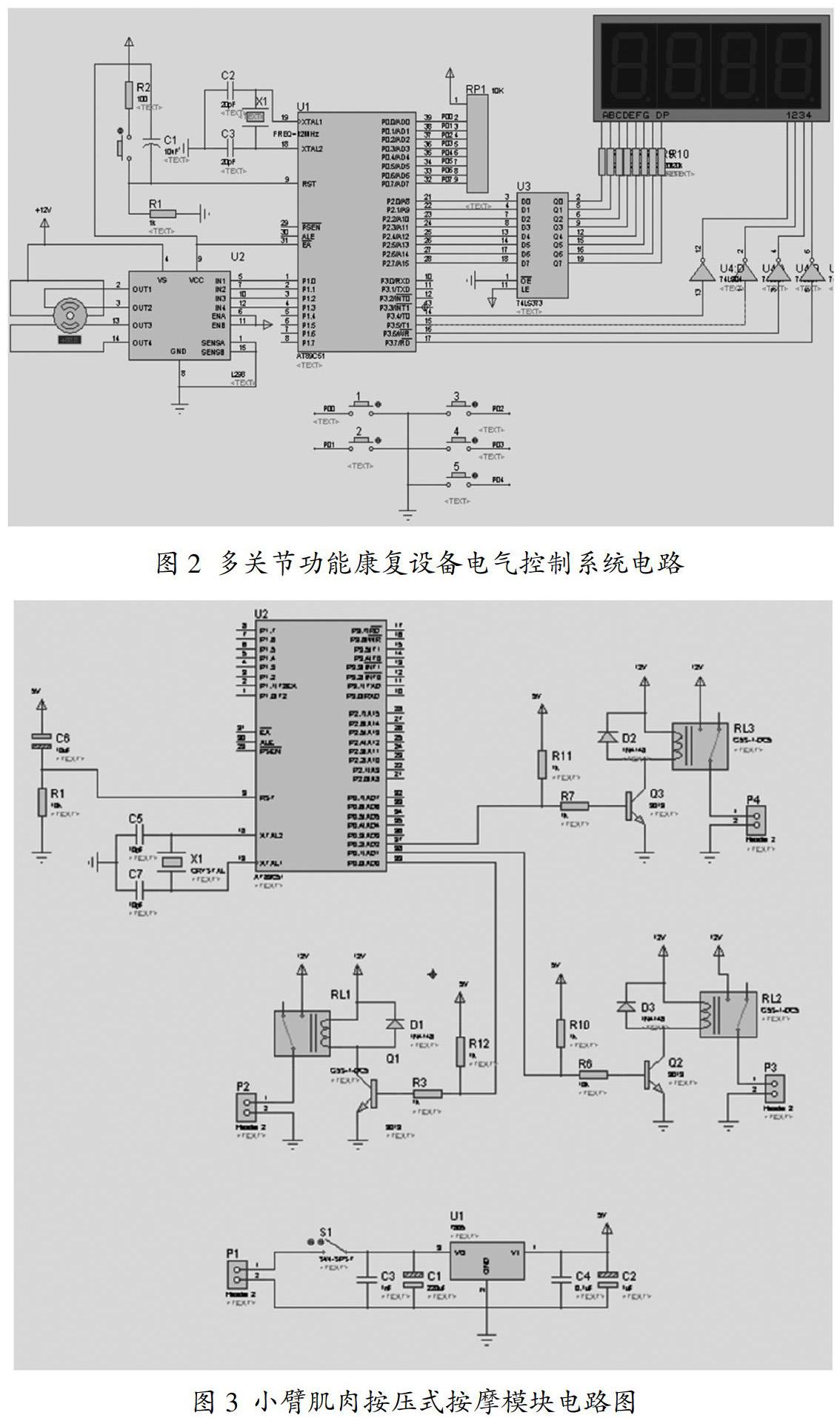
小臂肌肉按压式按摩模块电路见图3,该电路模块由电源电路和工作电路构成,整体供电为直流12V的电源,工作电路分为:单片机最小系统,气泵控制电路,电磁阀控制电路。使用三端稳压集成电路LM7805直接把直流12V电压转换成直流5V电压为单片机STC89C52RD供电,单片机STC89C52RD会自动复位,计时方式为内部时钟电路的时钟计时,单片机的P2.0引脚输出高电平使三极管Q1导通,继电器闭合,P2接口通电,驱动气泵开始工作,这个时候,单片机的P2.1引脚也输出高电平使三极管Q2导通,继电器闭合,P3接口通电,驱动电磁阀1开始工作,为气囊充气,当单片机的定时时间达到,气囊开始通过电磁阀1排气,此时P2.2引脚输出高电平,Q3导通,P4接口通电,驱动电磁阀2开始工作,为另一组条形气囊充气,到达单片机预定时间后,P2.2引脚输出低电平,Q3,电磁阀2停止工作,气囊通过电磁阀2排气,紧接着电磁阀1开始工作。整个工作是电磁阀1与电磁阀2的依次重复工作,当达到系统设置的按摩时间后,P2.0引脚输出低电平,Q1截止,继电器断开,充气泵停止工作。
3 结束语
手部多关节功能康复设备电气控制系统由手部多关节屈伸训练模块和小臂肌肉按压式按摩模块组成。手部多关节屈伸训练模块通过对手指运动角度的设定以及康复训练计时的显示、电机正转反转、加速减速等软件编程,达到预期康复训练目标,可以实现被动康复训练的功能。前臂肌肉按压式按摩模块作为手部康复训练后的辅助按摩装置主要通过自带三个16位的定时器且内置复位电路的STC89C52RD单片机组成最小控制系统,通过控制气泵对气囊的充气顺序达到按摩前臂肌肉的刺激加速血液循环的功能。此设备可以用于帮助脑卒中引起的对侧或双侧上肢肌无力患者进行康复训练。
参考文献:
[1]邢科新.手功能康复机器人系统若干关键技术研究[D].武汉:华中科技大学,2010:1-161.
[2]陈晓宇,沙宪政,尹勇.多功能手部肌肉运动训练仪的研制[D].沈阳:中国医科大学,2013.
[3]胡鑫,张颖,李继才,等.一种外骨骼式手功能康复训练器的研究[J].生物医学工程学杂志,2016(1):23-30.
[4]皮哲.充气波气压治疗仪对骨折患者的临床应用及护理[J].医学理论与实践,2020,33(08):1364-1365.
[5]郭晓輝,王晶,徐光华.手部功能康复机器人研究最新进展[J].中国康复医学杂志,2017(2):235-240.
[6]昌赢,孟青云,喻洪流.手部康复机器人技术研究进展[J].北京生物医学工程,2018(6):650-656.
猜你喜欢
中国典型病例大全(2022年11期)2022-05-13
中国典型病例大全(2022年13期)2022-05-10
中国典型病例大全(2022年10期)2022-05-10
中国典型病例大全(2022年7期)2022-04-22
科学导报·科学工程与电力(2019年7期)2019-09-10
汽车与驾驶维修(维修版)(2019年6期)2019-09-10
科技视界(2017年12期)2017-09-11
中国机械(2014年23期)2014-10-21
电子世界(2004年4期)2004-07-26
电子世界(2004年4期)2004-07-26