机械加工行业CPS应用研究
2020-11-09 06:48
纺织科学研究 2020年10期
(北京中丽制机工程技术有限公司 北京 101111)
1 引言
CPS(信息物理系统)作为智能制造的基础实现概念型和应用组织形式,重点是将真实物理系统、网络化的信息管理系统以及角色人进行面向业务的析构,进而完成有机融合。
2006年美国国家科学基金会(NSF)提出,CPS是将计算资源与物理资源紧密结合的系统,其最终目标是使未来的物理系统具有目前尚不具备的灵活性、自治性、高效率、高可靠性和高安全性[1]。从应用对象上看,CPS是集成了计算系统、大规模通信网络、大规模传感器网络、控制系统和物理系统的新型互联系统[2],它应具有对大规模物联世界进行实时监视、仿真、分析和控制的能力。因此,对CPS的研究成为了大规模工业系统进行智能制造升级的必要手段。站在工业系统运转层次上看,CPS也存在不同的粒度和级别,分别对应工业企业的不同应用对象。究其根本,CPS是一个综合计算、网络和物理环境的多维复杂系统,通过3C(Computing,Communication,Control)技术的有机融合与深度协作,实现大型工程系统的实时感知、动态控制和信息服务[3]。
在连续制造行业里,CPS有时被理解为智能工厂系统,或者是一个工厂数字化系统。CPS做到全面态势感知、虚实共变、自组织与自适应、知识自动化,实现智能工厂实时监控功能,信息集成、共享和协同功能,综合仿真和全局优化功能[4]。但事实上,CPS更重要的是它的小颗粒化的独立性,也就是说不仅是企业级、车间级,甚至于单台设备和工序集控点,都可以作为一个CPS[5][6]。而对于离散制造的典型行业,机械加工业存在产量不持续或小批量、型号繁多、工艺调整频繁等固有属性,它的CPS应用始终没法很好地形成体系化。但在支持国家智能制造体系的战略部署背景下,机械加工业作为工业输出的重要组成部分,同样必须贯彻和实施CPS技术路径,以确保在更有实效的智能化发展趋势上保持领先。
机械加工行业企业超过90%仍处在自动化和信息化阶段,在这样的情况下提出CPS智能化分析决策是不现实的。因此,针对智能制造方向发展前景,本文提出了一种面向当前离散制造业数字化程度不高现状的多层级CPS集成框架,并在解决单元级CNC数控机床的CPS应用的基础上,给出面向Fanuc数控机床的单元级CPS实现方案,最后从可扩展性和长效性角度列举了未来机械加工行业CPS的几个关键问题解决思路。
2 机械加工业CPS核心应用体系
机械加工业是传统的工业基础,它的加工主体通常是金属毛坯或型材,加工方式包括材料结构热处理、型态处理、表面处理,附加的工艺过程包括装配、调试、检测及涂装和包装等。其中以数控加工中心提供的车、铣、刨、磨、钻等型态处理是最常见也是最核心的工艺过程,大部分机械加工企业都在数控设备能力上要求颇高。小型加工企业通常只能围绕数控加工中心来完成小额定制化生产任务,中大型企业则基于多台套加工中心并行工作,配套原料半成品的物流仓储控制,完成批量工艺定型产品的生产,这个批量生产过程以产线方式存在。不同产线之间由于存在大量类似工艺环节,因此信息化程度较高的企业会形成车间级协同和协调的生产能力。
显然,智能制造区别于自动化生产最大的表征就是,生产加工环节的可感知、可控制、可自调节。因此,在这个要求背景下,CPS应用是智能制造的核心体现。
在应用层面上看,物理系统里的感知单元和执行单元通过可信任通信网络与CPS单元进行交互,其核心在于物理系统与CPS的实时事件消息交互定义以及中心化数据处理和存储设计[7]。CPS的智能化体现不仅限于设计之初就固化的信息组织逻辑,比如设备运行状态信息和控制指令,而应当可以在业务迭代更新过程,甚至面向扩展业务系统时,都能承担数据服务和边缘端处理能力。因此,结合机械加工行业里离散订单式作业形态特征,以及未来将会以产线和车间甚至企业为单位的协同生产模式,同时兼顾行业/国家层面的智能制造平台的应用(如海尔COSMOPlat、航天云网等)对产业供应链的内在分析控制能力,机械加工业的CPS应用体系可以分为四层结构:单元级、系统级、企业级和产业级。这四级定义分别对应单体设备/加工工序管控区、产线/车间、企业/联合企业、行业上下游,CPS的结构定义可以帮助各个层级完善自身能力的建设,并作出关联层级的信息互操作设计(见图1)。
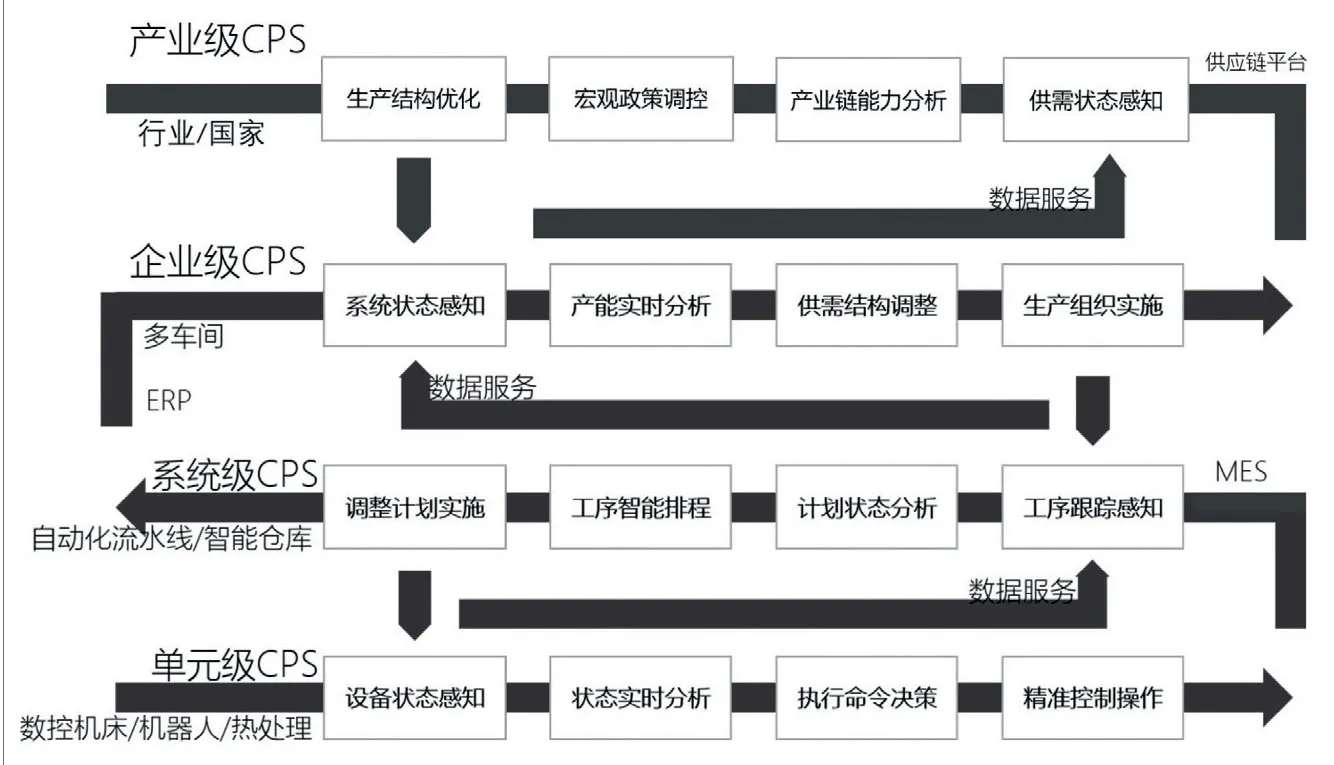
图1 机械加工业CPS核心应用体系
机械加工业单元级CPS应用的对象是集中加工环节,如数控加工中心、焊接工业机器人、热处理设备。它负责提供单任务回路的感知、计算与控制,包括网络化设备状态的数字化感知(可能是开关量,也可能是结构化的信息)、结合工单进行的任务跟踪分析(从预备的时间估算到执行启动控制再到故障状态预警)、人在回路的决策控制(包括刀具选择、加工程序下载、运动路径选择、加热通气的参数配置定义等),到最终执行控制完成任务操作(如车铣刨磨、焊接搬运、检测反馈)的全过程。
单元级CPS面向的工艺输出通常是可预知的,所以在设计单元级CPS时,通常会结合工艺设定与输出的配套数字化定义来完成应用。单元级CPS的计算和数据缓存会放在本地以保证实时性,数据类型需要围绕应用进行结构化加工,如针对机床的工差定义可以把进刀补偿和主轴/给进转速等参数作为数据组计算后整体提供并进入控制回路,而不需要把每个单独参数发到系统级CPS里做运算再回到控制通道。
机械加工系统级CPS应用的对象是自动化流水线、智能仓库、加工车间[8]。它运行感知的能力是依赖于现场的数据服务器实时提供或者由单元级CPS的云数据服务器通过订阅机制提供。系统级CPS是要完成并自动优化工单的执行,因此它操作的数据大部分是加工过的生产结构化数据(如BOM、检测报告、设备健康值)和经营结构化数据(工单、原料库存、人员参与度和岗位设定)。再对这些数据进行过滤、转换、综合,并最终产生如生产率、工单进度、成品率、人员绩效评估等典型应用指标,管理人员会从负责系统级CPS的制造执行系统(MES)里完成决策和控制,如动态排程优化、人员调配、设备管控、原料/半成品的供应等。这些操作的结果将是企业运营的重要参考。
机械加工企业级CPS应用面向的是多车间协同或企业的运营管理,它感知的数据将围绕以ERP为代表的生产数据[9]和市场分析数据。在企业级CPS里,我们通常会集中提供分析决策模型,帮助经营者完成供和需两头的预测和服务能力的评估。这些评估会围绕利润率、产能、人才结构等方面展开,现阶段常见的是以预警或评级的方式出现。在大数据的支持下,企业级CPS的未来会增加预测模型,帮助最终经营者完成生产组织的调整优化。
机械加工产业级CPS应用是站在国家和行业的角度,保证其长期稳定的发展,并重点提升关键效益子产业,优化产业结构。它感知的内容是来自企业的经营数据,通常这些数据是通过行业协会或金融机构获得。如今出现的面向智能制造的供需平台,如COSMOPlat、航天云网,它们负责打通产业供应链,并初步将这些新兴制造业的能力输出进行了跨企业的评估。虽然它们现在还不能负担起这些精细化生产核心的供需数据服务,但产业级CPS还是可以挂接到这些平台上,帮助行业机构/政府进行宏观的决策分析,推导产业的生命力和关键指标。而最终的政策引导、行业咨文和金融行为都将会产生控制,形成市场数据,并回归到企业级CPS的感知范围。
显然,这样的四层结构代表的是不同粒度的智能化个体能力。通过能力印射,单元级CPS应用可以帮助小型定制化企业完成生产能力的集约化管控,确保资源释放的效费比。系统级CPS应用可以辅助大中型批产企业实现流程化生产柔性化,保障产品订单实施的合理化。企业级CPS应用则最终满足超大型企业和机械加工行业实现以工艺过程交付能力为核心的资源自组织,提升生产资源与生产力的有机搭配。产业级CPS会从社会感知层次帮助跨企业的产业链重构。从智能制造的规模层次上看,每一层都兼顾CPS的3C 要求和上下串接的能力,更能体现分级3C的松耦合原则,也更容易被智能制造能力参差不齐的企业现状所接受,非常符合当前机械加工业的智能化进程需求。
3 单元级CPS应用
单元级CPS作为可理解的智能制造系统最小感控单元,其重点是解决设备数字互联控制,通过边缘端设备或设备内嵌应用两种方式实现,如加设传感、控制功能的机械臂和传动轴承等。现在大部分单元级CPS只是针对特定业务逻辑,虽具备了可感知、可计算、可交互、自决策的能力[10],但考虑到单元级CPS与系统级CPS的强关联,而且是网络化流程化互操作,因此单元级CPS还应在普适识别、精确定位、路由访问、动态联网以及节点扩展等方面进行设计[11]。典型的单元级CPS可归纳为六层架构,包括基础支撑层、感知层、边缘控制层、大数据层、访问层和安全互操作层(见图2)。
基础支撑层:负责CPS内部的业务组织和外部协调框架,它与大数据层、访问层、安全互操作层协同完成内部运转和外部数据互通以及设备互操作。从外部角度上看,基础支撑层在CPS内提供了一种数据组织和提取的方式,同时提供独立的数据处理能力。
感知层:负责CPS里对设备的数据以及外部数据的获取,包括设备本体运行参数、加工件信息、协同设备可操作状态等。通过提供标准信息结构,感知层可以将可控部件/元件确立为CPS型态,能够持续主动为外部系统提供状态数据,也可以被动释放实时或历史状态数据。
边缘控制层:负责直接通过内嵌协议有线或无线方式下达本设备控制指令,或者通过安全互操作层下发协同设备可识别的指令。边缘控制层通常围绕CPS个体变化或对外操作展开,其中内嵌的逻辑判断模型在服务实施过程中快速调用,以保证实时性。
大数据层:负责数据的主动/被动收集、质量控制、结构化组织、过滤/加工、打包发布。在没有大量数据支持的状态下,大数据层更多的任务是数据有效性保障,也就是说,对于外系统访问的信息,涉及到的数据组织必须通过大数据层的认定和调整。

图2 单元级CPS逻辑功能架构
访问层:负责提供云端/本地服务器上的公共数据访问,包括 MQTT/TCP协议或启动OPC 数据服务。访问层保证的是组织数据的订阅,考虑数据的保密性,但访问安全由安全互操作层来控制。访问层在多用例并发的情况下,通常会增加缓冲机制来保证同步性。但在与边缘控制层交互时,必须快速直接以保证实时性。因此访问层会基于多优先级别的访问权限来构建应用交互。
安全互操作层:负责保证数据访问和设备访问的安全,通过电子密钥鉴权和介质密钥鉴权方式保证设备端的操控许可,同时把对外发布的数据进行必要的转置,进行数据二次加密。从工业互联网发展趋势上看,设备间的互联互操作将是必不可少的设备级CPS能力,因此安全互操作层还需要提供设备安全接入的安全管控。
为了验证上述框架,特以FANUC系统的数控机床为对象,包括台湾荣田精机VL-400CM、起亚SKT28、台中精机V26,基于Arduino平台进行了设备接入和单元级CPS系统实现。其中,VL-400CM支持直接以太网接口,SKT28支持PCMCIA接口,V26支持RS232C接口。使用的Arduino UNO R3边缘集成平台扩展无线以太网模块ESP8266WiFi,并安装标准MQTT库PubSubClient。
边缘端基于MQTT 协议与数据服务端进行信息通信,数据服务端作为MQTT Server和OPC Server部署在云上。监控客户端基于OPC 协议从数据服务端获得数控机床的实时状态,并可进行远程的参数控制。具体可获得的参数可参考表1。
参数中报警信息是作为主动推送数据,其他都是采用被动访问机制来释放数据获取能力。在大数据层会对数据质量进行快速判别,坏数据处理会基于设置的两种数据模式来决定是否采用插值方式补全。在访问层,采用了最基础的入口单次权限判定,并不用交互过程权限判定。
可进行的远程参数控制可参考表2。
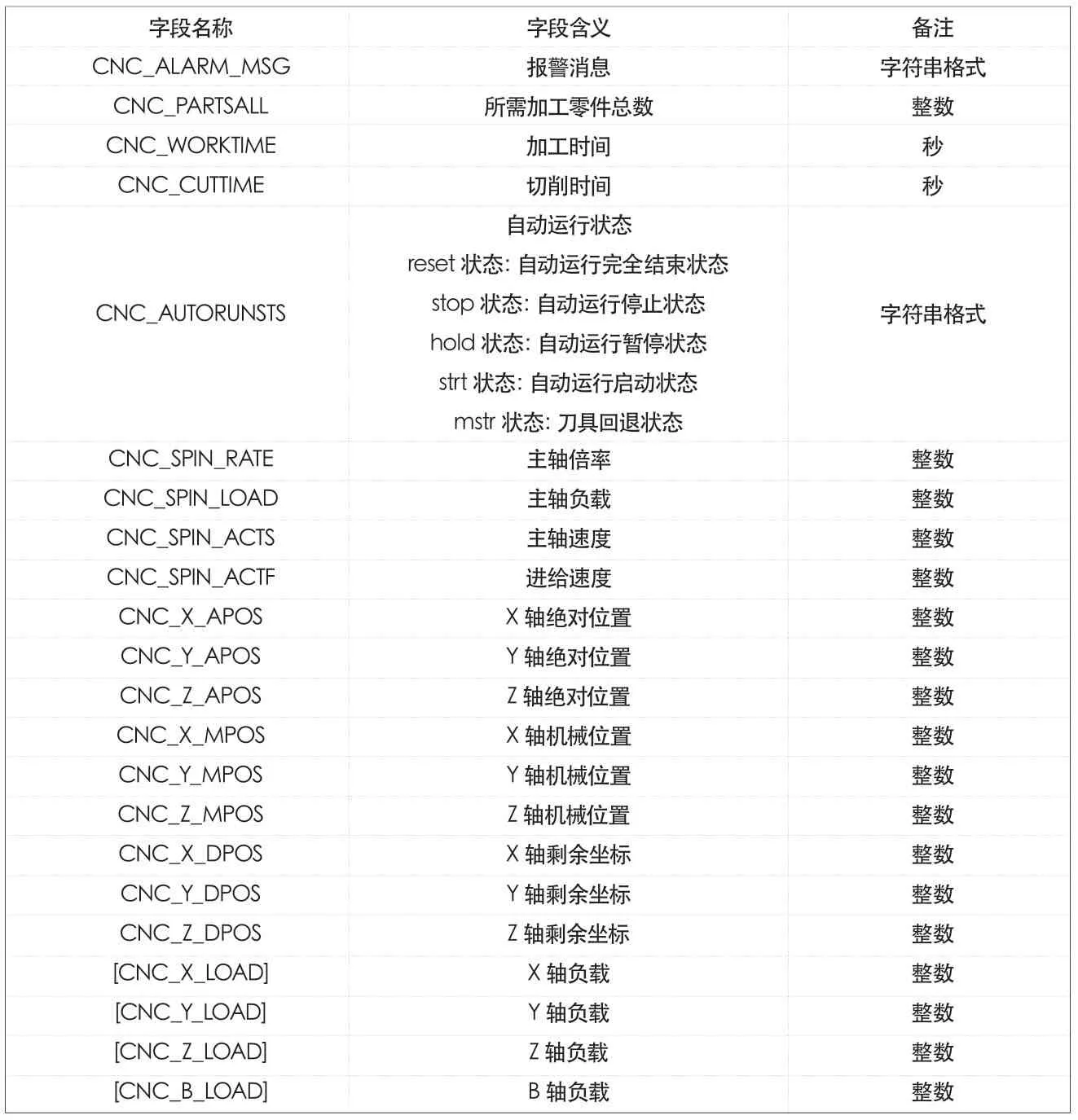
表1 数控机床状态参数表
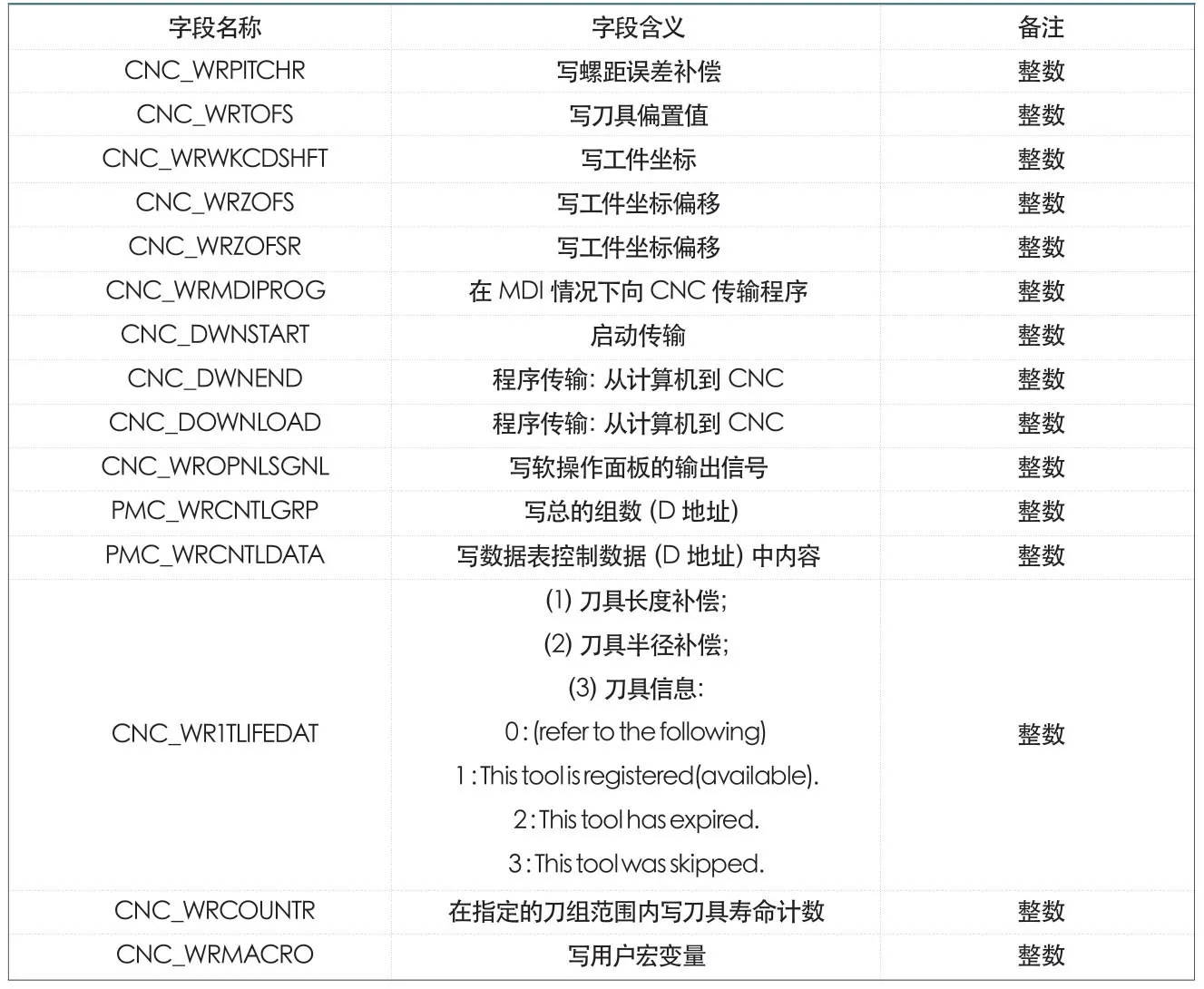
表2 数控机床调控参数表
为保证安全性,关键的CNC 程序下传控制增加了指令过程的权限判定。
目前3个型号数控机床均完成了CPS改造,经试验,本地的分类报警消息和人为设定用时超限报警比原机床更加直观,同时远程程序传输使得机械加工过程无人化进程在数控机床环节得到充分的实施验证。该单元级CPS验证为系统级CPS的应用设计打下了基础。
除此之外,结合传统纺织卷绕机控制系统的系统改造项目,也进行了最小系统级CPS的验证。实施的对象是典型的通过WinCC/组态王基于工控机完成隔离后控制的卷绕机控制系统。由于已有WinCC和工控机系统是单任务系统结构,无法实现通用的产线多卷绕机(作为执行系统)的感知和控制能力,更无法把控制能力抽象出来和上层的MES系统对接,因此,从结构上,通过一个PAC 完成网络拓扑的无缝移植,由于执行机构和使用习惯的约束,控制接口和控制界面暂时还是维持原有的型态,但CPS之间进行级联,并支持触屏快速设置、手机移动端的设置、多产线联动设置,实现了系统级CPS的感知、控制、分享、协同的要求。该方案适用于POY、FDY 等不同的纺丝生产线,并在6个客户系统上进行了验证(见图3、图4)。
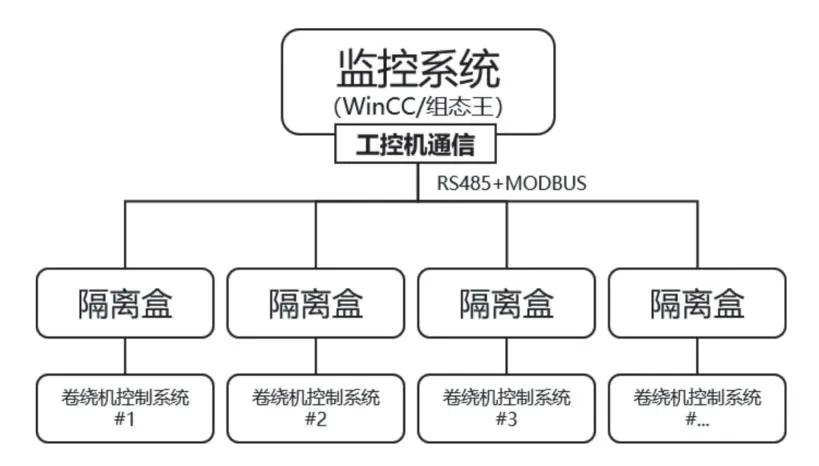
图3 原卷绕机控制硬件拓扑
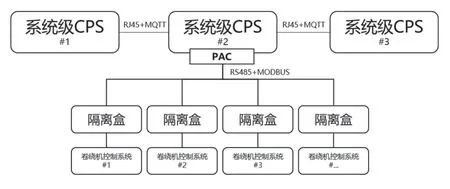
图4 加入系统级CPS的卷绕机控制硬件拓扑
4 结语与展望
智能制造是CPS应用的一个重点领域,而机械加工行业是智能制造的基础领域,本文围绕机械加工行业特点进行了CPS多层架构设计,并围绕单设备网络化运营所需要的单元级CPS进行了设计验证。
四层CPS应用架构虽然能够很好地覆盖当前的机械加工业大中小企业进行智能制造转型的需求,但未考虑小型企业在不形成产线能力,只是针对单个加工能力向外企业提供CPS应用的情况。在没有产线管控信息系统如MES的参与下,单元级CPS应当本身具备跳级交互的能力,如外企业直接基于标准加工数据接口,对接本企业的数控加工中心。
机械加工行业CPS的应用很大程度上局限于CPS的自身设计,尤其当不同层级的CPS被当作一套简单的信息系统,而没考虑到与上下游的交互和互操作要求。为了保证未来机械加工行业的CPS应用,每个层级都应当有相应的架构标准和模块接口要求,从顶层实现对快速入网、安全接入、自动感知等能力的保障。
猜你喜欢
航天制造技术(2022年4期)2022-09-30
建材发展导向(2022年6期)2022-04-18
中国科技纵横(2021年23期)2021-11-27
当代工人(2020年13期)2020-09-27
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09
文苑(2018年21期)2018-11-09
农家科技(2017年10期)2018-01-09
娃娃画报(2009年9期)2009-09-14