
近程无人机避障技术研究
2020-11-09 10:14张雄
无人机 2020年12期
张雄
中国人民解放军77115部队
近程无人机在山区飞行,航线规划或改变飞行路径时也许存在失误,导致飞行中可能发生安全事故,例如碰撞山体等障碍。本文通过分析和比较无人机常用避障技术,提出近程无人机采用激光雷达探测障碍物的方法,经过数据处理模块计算、识别和输出避障信号,向飞控计算机发出指令,飞控计算机输出控制信号或人工操控无人机改变航线,机动飞行避开障碍物,实现山区飞行避障。
无人机在现代战争中的地位越来越重要,在侦察、监视、机动攻击、火力校射、电子对抗等作战任务中,显示出极大优越性。近程无人机作为各国主要战术无人机装备,在山谷低空飞行时能很好避开敌方雷达探测,提高战场生存能力。但是,近程无人机在复杂山地环境和低空飞行时,对操控人员提出了更高要求,既要考虑无线电通视条件,又要防止与山体等障碍物发生碰撞,技术准备更加复杂,要投入较多精力仔细校对航线高度与地形高程有无交叉。如果需要人员临机操控无人机飞行,改变任务地域和航程点时,准备时间紧张,指定航程点可能不尽合理,无人机有可能与山体、障碍等相撞,飞行存在极大安全隐患。在山地环境组织近程无人机飞行,主动预警避障显得尤为必要。
主要无人机避障技术
无人机在空中飞行时,通过传感器收集飞行器周边环境信息,测量安全距离内的障碍物距离,通过计算、处理、发出预警信息、规划航线或者做出机动飞行,从而达到避碍目的。小型消费级多旋翼无人机避障技术应用已走在前列,部分产品已能初步满足普通用户需求,在很大程度上能减少因操控失误造成的坠机事故,以及无人机坠毁对人和建筑物造成的危害。但是,近程无人机外形尺寸和最大起飞重量,均超过小型多旋翼无人机多个数量级,且飞行速度快、航程远,现有小型多旋翼无人机避障技术无法满足近程无人机在复杂环境的飞行需求。
障碍物距离探测和预警避障算法是避障技术的核心,常见的测距方法有超声波探测、红外探测、激光探测以及视觉探测等。
超声波测距
利用声波遇到障碍物会反射的原理,根据声波收发时间差和速度,计算出障碍物距离。
红外测距
利用红外线在物体上的漫反射原理,不同距离的障碍物反射的角度不同,通过三角测量计算,测出物体距离。
激光测距
利用收发光线的时差、相位、速度计算目标距离。
视觉测距
犹如人类的双眼,用两个摄像机进行拍摄,根据两幅图像的景深视差,利用复杂算法模型计算出物体距离。
几种测距方法适用于不同应用场境,各有优劣。超声波探测距离太近、容易被吸收,红外线易受外界环境干扰,视觉测距系统复杂、在夜间和受天气影响大,这三种测距方法不适用于近程无人机。激光测距技术成熟,探测分辨率高、速度快、距离远,设备重量轻、体积小,适合应用于近程无人机测距避障。
以某无人机激光雷达(Lidar)正射点云数据为例,按点密度3~10个点/平方米进行采集,点云数据经处理后得到正射影像,图2所示为正射点云数据影像,能精确呈现高度数据。同理,将机载激光雷达向正前方扫描,可获取无人机飞行前方的障碍物距离点云数据,如果障碍物方向和高度在飞行航线上,则无人机需执行避障策略,自动判定障碍物,并改变飞行航向、俯仰姿态进行避障。

图1 消费级多旋翼无人机避障技术已基本能满足用户需求。

图2 正射点云数据影像。
近程无人机避障措施
在无人机机头安装可旋转扫描的面阵激光雷达,飞行中不间断扫描前方180°范围内的障碍物,生成障碍目标点云,每个点含有三维坐标信息,经过数据处理模块计算,与设定安全距离阈值比对后,向飞控计算机发出避障信号,飞控计算机发指令给相应舵面,控制无人机改变航向、俯仰姿态做出避障动作,达到避障目的。图3为近程无人机避障系统结构图。
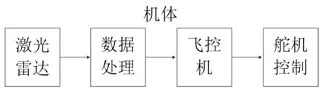
图3 近程无人机避障系统结构图。
近程无人机避障算法设计
参考部分近程无人机技术指标,以平均巡航速度160km/h、转弯半径500m进行建模分析。设定有障碍物K1,无人机与前方障碍物距离SK>2000m、与左右障碍物距离DK>100m为安全距离,2000~1000m为预警距离,1000~500m为避障执行距离,<500m为危险距离。无人机沿X轴方向飞行,障碍物K与航向夹角为α,图4所示为无人机飞行模型图。
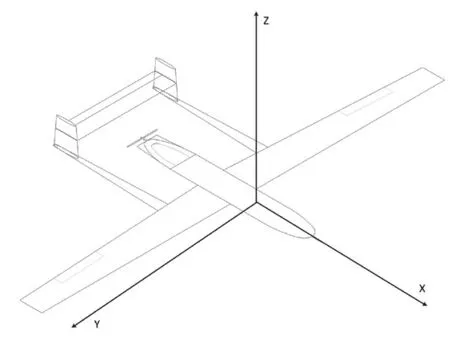
图4 无人机飞行模型图。
激光雷达不间断扫描航向X轴方向180°范围内的障碍目标,获取障碍物距离点云数据,数据处理设备读取点云数据,过滤掉因折射、云层等产生的无效数据,提取航向XY平面点云数据进行计算处理,将获取当前航向和高度的点云数据判定为障碍物。设无人机距前方障碍物距离为SK,无人机左侧90°范围内障碍物距离点云数据为L1,L2…Ln, 右侧90°范围障碍物距离点云数据为R1,R2…Rn,图5为无人机障碍探测模型图。

图5 无人机障碍探测模型图。

(1) 当SK>2000m,且DK≥100m时, 无人机按设定航线飞行。
(2)当1000<SK<2000m,且DK≥100m时,1000m的时间间隔t=1000÷(160×1000÷3600)=22.5s ⑦
数据处理设备向飞控计算机发出预警信息,预警信息通过数据链路回传至地面控制站,在飞行控制界面以图文或声音信息发出障碍预警提示,飞行操控手在t时间内,可以对当前飞行状态、航线、高程和地形图进行检查比对,制定应对策略,如降低发动机转速减缓飞行速度、改变航向,发出爬升、盘旋等指令进行人工干预,避开障碍物。当数据链路中断时,探测到前方有障碍物影响飞行,飞控系统执行无人机系统设定的现行普遍应用的链路中断策略,当无人机爬升至预设安全高度后,按照预设航线进行返航自动处置,避障系统进行辅助引导返航。
(3)如果错过人工操控时间,当SK<1000m,或者DK<100m时,进入避障执行程序,如果不采取措施,无人机将会在10s左右与障碍物碰撞,发生事故。
无人机距左右侧障碍物距离差值D=L-R

当D>0或DK<100m时,数据处理模块发出向左盘旋2°“航向调”指令,根据不同机型试验后可选取合理数据,保持当前航向后,没有探测到危险障碍物,按当前航向飞行。
当D<0或DK<100m时,数据处理模块发出向右盘旋2°“航向调”指令,保持当前航向后,没有探测到危险障碍物,按当前航向飞行。
循环执行第(3)步,可改变无人机飞行航向避开障碍物。
使无人机处于两侧山体中心线或避开障碍物飞行,是最理想状态。但是,由于无人机与两侧山体的距离不断在变化,从而导致无人机飞行时不断寻找两侧障碍物中心线位置,造成无人机频繁调整姿态和航线,导致飞行不够平稳。通过设定一定的距离余度差值范围,过滤掉一些细小距离数据变化,减少无人机不必要的机动。
当D>0时,假如设定距离余度差值在0~0.1R之间不执行动作,差值大于0.1R时执行避障,当L-R>0.1R ,则L>1.1R,数据处理模块发出向左盘旋2°“航向调”指令;同样D<0时,则R>1.1 L,数据处理模块发出向右盘旋2°“航向调”指令。不断检测障碍距离调整航线,直至调整到安全状态后,无人机沿预设航线经下一航程点飞行至任务区。建模数据可根据不同机型试验结果进行合理调整匹配。
(4)当前述条件都不满足,避障措施均未被执行或者执行后安全距离内仍有障碍物,且距离障碍物越来越近,无人机处于危险状态,当S<500m时,应立即发出“盘旋爬升”指令,无人机爬升至预先设定的门限值安全高度,待脱离危险时改为沿预设航线飞行。图6为算法逻辑框图。

图6 数据处理模块算法逻辑框图。
仿真模拟验证
构建任意连续山体边、在山谷之间预设任意航线进行模拟,根据栅格法计算出山谷中心线,如表1所示。假如预设航线出现人为错误,在A点高度低于地图上山体高程,若按预设航线飞行将会发生撞山事故。采用近程无人机避障技术,根据前述模型算法计算,求出校正航迹。无人机根据校正数据调整姿态改变航线,飞行路径为校正航线,成功在A点避开与山体碰撞,图7为仿真模拟验证过程示意图。
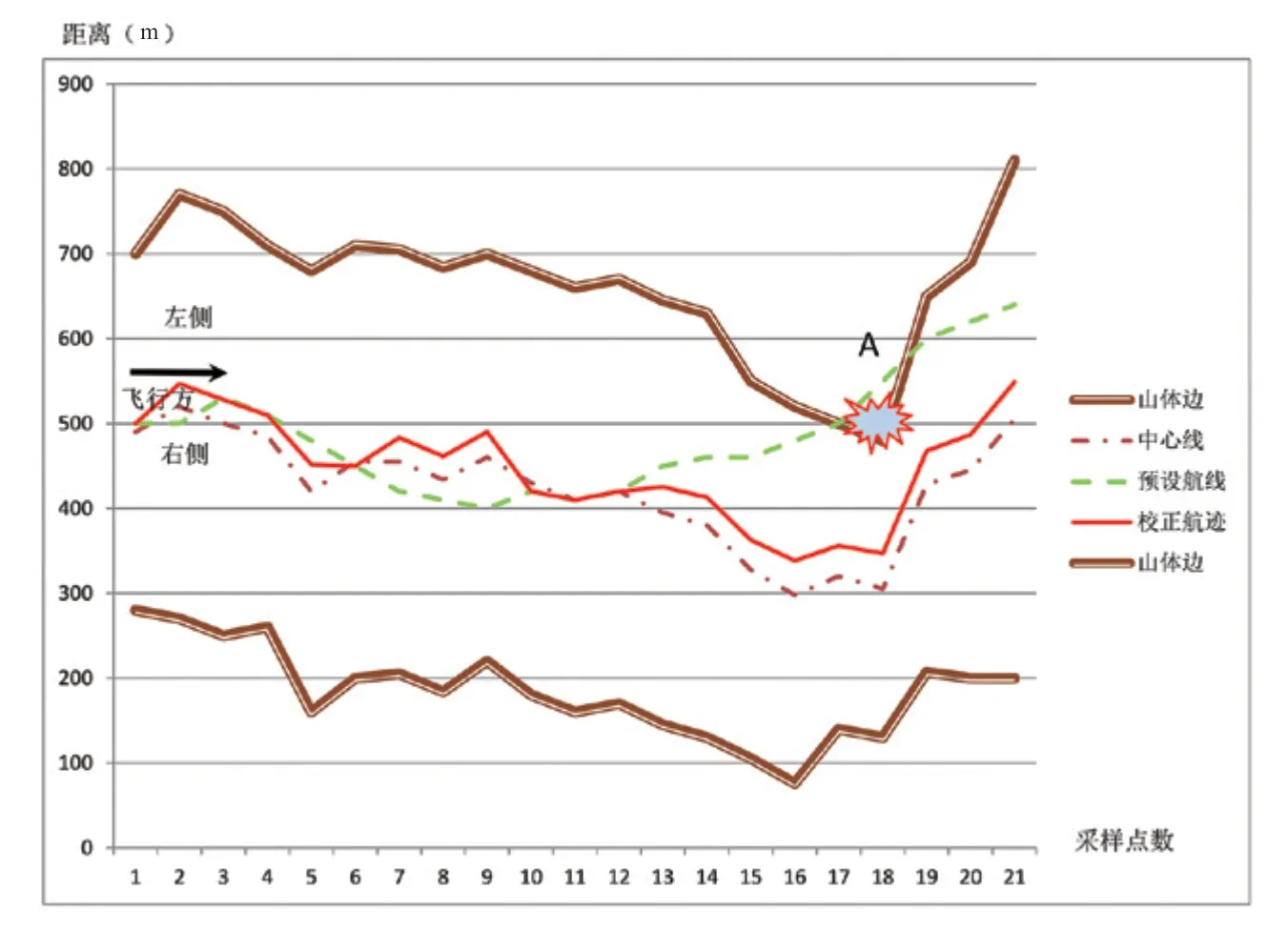
图7 仿真模拟验证过程示意图。

表1 仿真计算数据表。
在近程无人机安装激光雷达和数据处理模块等设备,实现在山区飞行的避障,通过分析和仿真计算,该避障技术具备一定可行性,但离实际运用还有较大差距,需进行系列试验和数据验证,而且单一技术也有很大局限性,需要多种技术手段相互补充才能达到更好的避障效果,为近程无人机安全飞行提供更全面的保障。■
猜你喜欢
导航定位学报(2022年4期)2022-08-15
舰船科学技术(2022年11期)2022-07-15
舰船科学技术(2022年10期)2022-06-17
农业工程学报(2022年4期)2022-04-24
航天返回与遥感(2021年6期)2022-01-11
科技与创新(2021年24期)2022-01-03
汽车观察(2021年8期)2021-09-01
科技研究·理论版(2021年20期)2021-04-20
计算机与网络(2020年19期)2020-12-04
当代陕西(2019年17期)2019-10-08
