
光热偏转光谱法测量煤油火焰内的速度分布
2020-11-04 11:23玄洪文李德华聂玉昕
光谱学与光谱分析 2020年11期
王 楠,玄洪文,李德华,聂玉昕
1. 深圳大学物理与光电工程学院, 广东 深圳 518060 2. 深圳大学深圳市激光工程重点实验室,广东 深圳 518060 3. 中国科学院物理研究所光物理重点实验室,北京 100190
引 言
火焰的光谱和速度测量是燃烧过程诊断和推进动力学的重要研究内容之一。在早期的研究中,激光诱导荧光和拉曼光谱等技术的出现使得流体测速得以实现,而激光多普勒速度测量学由于其测量精度高获得了更为广泛应用。由于测量过程本身的复杂性而以及低速测量中的误差增大使得该方法的应用受到一定限制,于是面向低中速流体和固体材料测量的光热偏转光谱法[1-3]光热偏转光谱(PTDS)具有一定的实用价值。目前在国际上已实现对火焰和气体喷流的速度和温度分布等参数的测量,Rose等使用PTDS方法用于氮气喷流和氢氧焰的速度测量[4],Nie等将该方法用于低速流体速度和温度等参数的测量[5]。目前国内采用PTDS的相关研究主要针对于固体或液体[6],对于气体或等离子方面的研究相对较少。本文基于光热偏转光谱法实现了对煤油火焰内不同面的速度分布测量,对于火焰燃烧测量诊断和激光技术在火焰诊断中的应用具有实用价值。
光热偏转光谱法测速的基本原理如图1(a)所示。一束泵浦光沿x方向入射到被测流体(或火焰)中,由于流体中成分吸收泵浦光而形成以泵浦光中心点为光心的热透镜分布。一束探测光沿y方向(或者按照一定夹角)入射到流体中,探测光入射平面高于泵浦光入射平面,高度差设为Δz。泵浦激光在流体中产生的热透镜沿z方向移动到达并逐渐通过探测光,探测光由于介质折射率的改变产生方向偏折,如图1(b)。通过测量探测光在高于泵浦平面距离Δz的信号偏转相对探测光在泵浦平面信号偏转的延迟,可以获得热透镜在该段区域的飞行时间Δt。假设流体速度在这一小段距离内是均匀的,则流体在该段区间的速度为飞行距离Δz与该飞行时间Δt的商。由于Δz是设定的已知量,所以速度测量等价于Δz距离段的飞行时间Δt的测量。如果待测流体为静止且泵浦光为连续光时(即流动速度为0),泵浦光在流体中产生的热透镜固定不动,探测光入射到热透镜后发生特定角度偏转,只在入射到不同位置产生不同的偏转角,通过热透镜中心的探测光不发生偏转。当流体速度大于0时,在产生流动的瞬时会使得探测光出现动态偏转,但经过一段时间后,连续泵浦光和流体相互作用产生的热分布达到新平衡,探测光不存在偏转。若使用脉冲光进行泵浦,热透镜产生于特定时刻并随流体移动,并且周期性地产生和输送热透镜,探测光则能获得周期性的偏转信号。如图1(b)所示,热透镜在流体速度z方向上按照速度v移动,在热透镜的上下两端和光心位置探测光不发生偏转,在透镜上中和下中两段发生最大响应偏转且方向相反,从而得到如图1(b)所示的时域波形。对于初始位置泵浦光与探测光空间上重合于火焰中,相当于时域波形的后半条曲线,即在光心和热透镜下方不偏转,下中部位偏转最大,探测光仅在一个方向存在偏转,可以用此临界曲线作为泵浦光和探测光是否重合的标志。通过记录探测光位于泵浦光上方Δz时的时域波形和探测光与泵浦光重合时的时域波形,取二者曲线中热透镜光心通过探测光的时间点差就可得到热透镜在距离Δz内的飞行时间Δt,从而得到热透镜的移动速度。
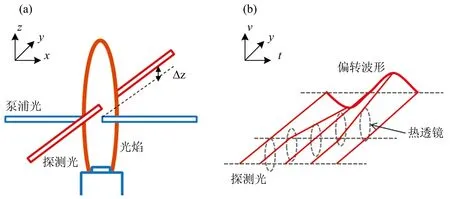
图1 光热偏转光谱法泵浦探测原理示意图(a): 示意图;(b): 偏转原理Fig.1 Principle of photothermal deflection spectroscopy(a): Schematic diagram;(b): Principle of phtothermal deflection spectroscopy
1 实验部分
自建的光热偏转泵浦探测实验装置如图2所示。由于实验所用煤油为烃类化合物,燃烧的火焰中包含有CO2,OH-和H+等多种成分,此处选用短波长的紫外激光进行激发[7]。选用商用的重复频率为10 Hz,脉宽为5 ns的355 nm三倍频固体激光源(EKSPLA)。实验所用的初始泵浦光单脉冲能量为20 mJ,使用手动升降平移台调整激光光束高度,并使用焦距为250 mm的平凸透镜聚焦到火焰中。探测光使用功率为2 mW的632.8 nm连续He-Ne气体激光(北大激光),通过望远镜扩束系统后再经过焦距为200 mm的透镜聚焦到火焰中,探测光的位置始终固定,实验初始状态对应于泵浦光和探测光的焦点在火焰中垂直相交。燃烧原料为煤油,放置在不锈钢灯具中,灯具放置在带有四面通光孔的双层防护罩中。为了降低激光超净室空气扰动对火焰的影响,并且减少烟尘对激光器件的影响,在防护罩上方使用自建的抽气系统将燃烧废气导到室外。为方便测量火焰内的不同位置点,灯具下方使用高度和水平位置精确可调的平移台对火焰相对激光的位置进行移动,从而代替同时移动泵浦光和探测光在火焰中的位置引起的不便和降低误差。对探测光的偏转进行探测的元件为由四象限探测芯片(QP-100,上海欧光电子)改装的二象限探测头。探测头后接自建的差分放大电路记录探测光的偏转信号,并在数字示波器(Tektronix DPO 4054)上显示和记录波形。使用泵浦光的脉冲信号触发自制光电二极管探测器接到示波器中用于触发接收探测光信号。
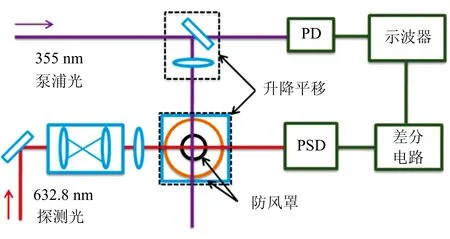
图2 煤油火焰速度测量实验装置示意图
在火焰速度测量中的空间分辨率是衡量泵浦探测装置精度的重要参数之一,近似定义为泵浦光、探测光和热透镜飞行距离组成的空间交叠体积
d=DpumpDprobecosθΔz
其中空间分辨率Dpump和Dprobe分别为泵浦光和探测光的聚焦光斑直径,θ为两束光入射到火焰中的夹角,Δz为泵浦平面和探测平面间距。当泵浦光和探测光同向(重合)入射到火焰中时,虽然在探测过程中将获得最大的偏转信号积累和信噪比,但会损失一个维度的分辨率;若两束光垂直入射到火焰中时,系统获得最高的分辨率,代价是偏转信号微弱,信噪比较低。在此实验中将泵浦光和探测光垂直放置入射,以达到较高的空间分辨率。使用精密电控平移台(Newport SMC100,步长为0.1 μm)和利用刀口法测量该实验中泵浦光和探测光在焦点处的光斑直径分别为310和140 μm。为同时保证尽量小的热扩散和尽量好的时间分辨率,实验中取泵浦和探测平面间距Δz为0.4或0.5 mm,该探测装置的空间分辨率优于2×10-5cm3。
2 结果与讨论
2.1 区间速度测量
在火焰中调节泵浦光焦点位置获得与探测光焦点重合的时域波形,得到如图3中H0所示的偏转波形。此时由于探测光打到热透镜的中心,偏转信号是激光通过完整热透镜偏转信号的一半。上下调节重合点可发现此波形位于波形畸变和反向偏转的临界处,其中前者对应探测光位于偏靠热透镜下部,后者对应探测光偏靠热透镜上部。调节泵浦光到探测光下方0.4 mm的位置,则偏转信号如图3中的H1所示。H1曲线位于波峰和波谷之间的相对零点对应于热透镜的中心通过探测光的时间点,其相对于H0曲线处的热透镜中心零点有1.2 ms的延迟,即热透镜中心在1.2 ms的飞行时间内经过了0.4 mm,则在此距离段的平均速度为0.33 m·s-1。
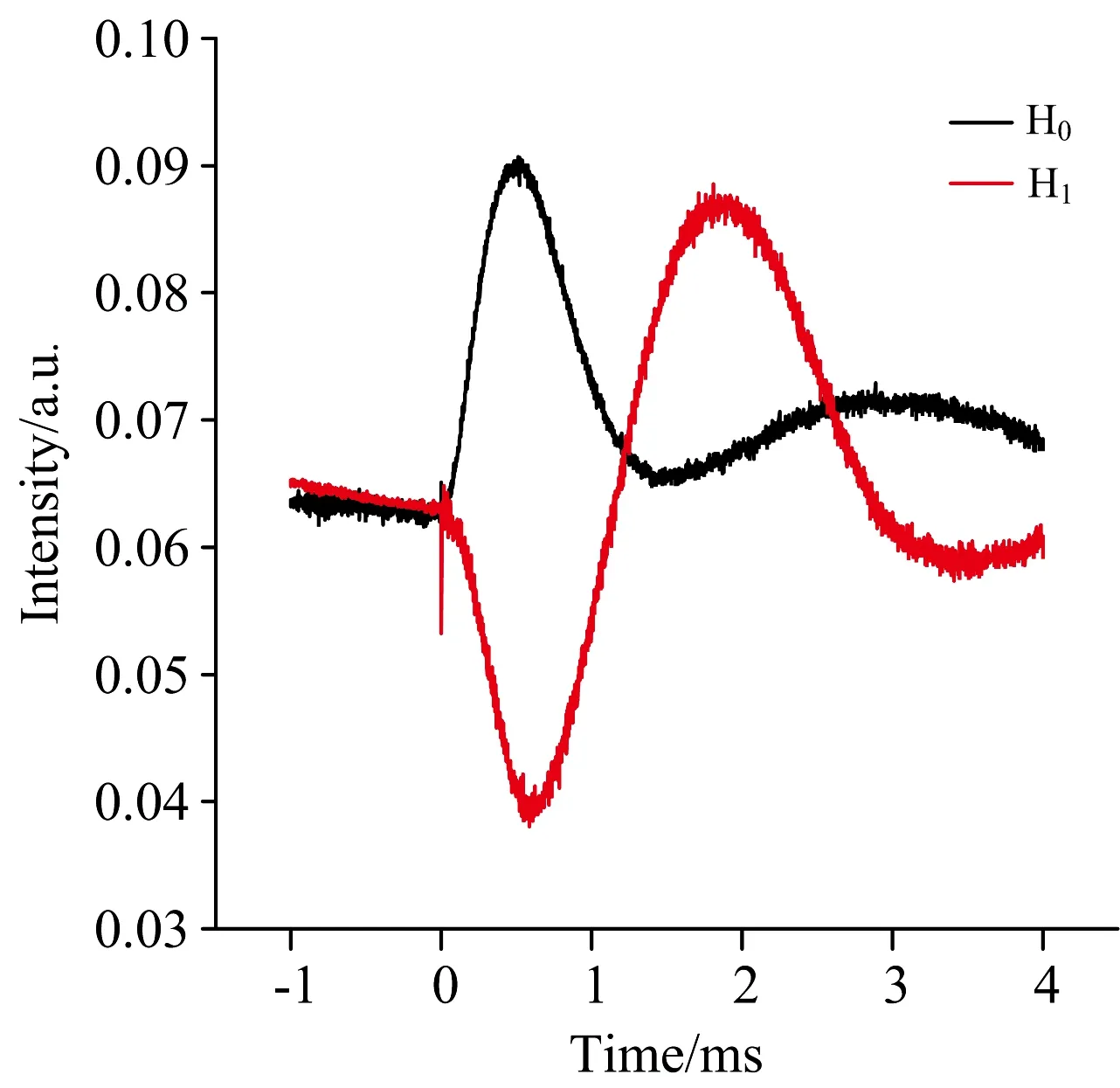
图3 探测光与泵浦光重合(H0)和位于泵浦光上方(H1)时的时域偏转波形
2.2 水平速度分布测量
测量同一水平面多个点的速度可得到该平面的速度分布。为了获得更为精确的单点速度,可测量该点上下两个距离区间段的平均速度再做平均作为该点的速度。如对于图4(a)的测量,以距灯芯高度5 mm为测量原点0,选取0±0.4 mm的三个测量水平面,使用区间速度测量获得原点平面0和-0.4 mm平面区间的平均速度以及+0.4 mm平面和原点平面0区间的平均速度,再进而平均两个速度值获得0点的速度。测量得到的数据与使用抛物线形曲线拟合后的曲线较为一致。同理,分别测量可获得距离灯芯高度为8和11 mm处的速度分布,如图4(b)和(c)。通过图4数据可知,在接近火焰下方的位置,同一水平面的火焰外部速度高于内部速度;在接近火焰上方位置,同一水平面的火焰内部速度高于外部速度;同一平面的速度分布接近于抛物线形分布。我们认为,这与各平面中的不同位置处的燃烧物的成分和浓度有关。在靠近火焰底部时,中间的燃料集中且由于缺少助燃的氧气尚未燃烧完全,浓度高质量重静止惯性大,其下方燃烧产生的推力小,上方阻力大,所以速度较低;而外侧的较容易得到完全燃烧,挥发快,质量轻,下方推力大,上方阻力小,速度较快。在靠近火焰上部时,随着燃烧物的完全燃烧以及受到下面火焰的推动使得中间的速度高于外部的火焰速度,而外焰部分由于逐渐完全燃烧转化为二氧化碳和水挥发掉了。从而推算,火焰的颜色和形状在一定程度上是未完全燃烧的燃料浓度的分布,颜色较浅的外焰和顶焰速度高于颜色较深的内焰和底焰。
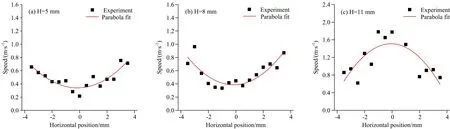
图4 距离火焰底部高度分别为(a) 5 mm、(b) 8 mm和 (c) 11 mm处的水平面上的火焰速度随位置分布Fig.4 Velocity distributions of flame at heights of (a) 5 mm, (b) 8 mm, and (c) 11 mm
2.3 垂直平面速度分布测量
测量火焰同一竖直平面上不同高度点的速度可得到该竖直平面的速度随高度分布规律。对距离火焰中心0±2 mm的三个竖直平面进行速度分布测量,可得到如图5所示的数据点。为增加高度测量范围和降低数据量,使用Δz为0.5 mm的泵浦探测平面间隔,对距灯芯2~9.5 mm的各点测量相对时间延时波形获得飞行时间,从而获得各个区间段和各个点的速度分布。由图5(a,b,c)可看出,竖直中轴线上靠近火焰底部的点速度慢于两侧,上部的速度快于两侧,同上述水平速度分布测量得到的结论一致。同平面速度相当的位置在距离火焰灯芯9 mm左右,此时速度约为1.2 m·s-1。在不断提升测量高度的过程中,火焰上方的抖动增大,且对泵浦光的吸收减少,使得探测光偏转信号微弱,降低了测量过程的信噪比。这主要是由于随着燃烧的完全进行,火焰中的主要成分为二氧化碳、水、一氧化碳和少量的其他杂质,他们的主要吸收峰位于红外,对它们的测量受限于激光光源。
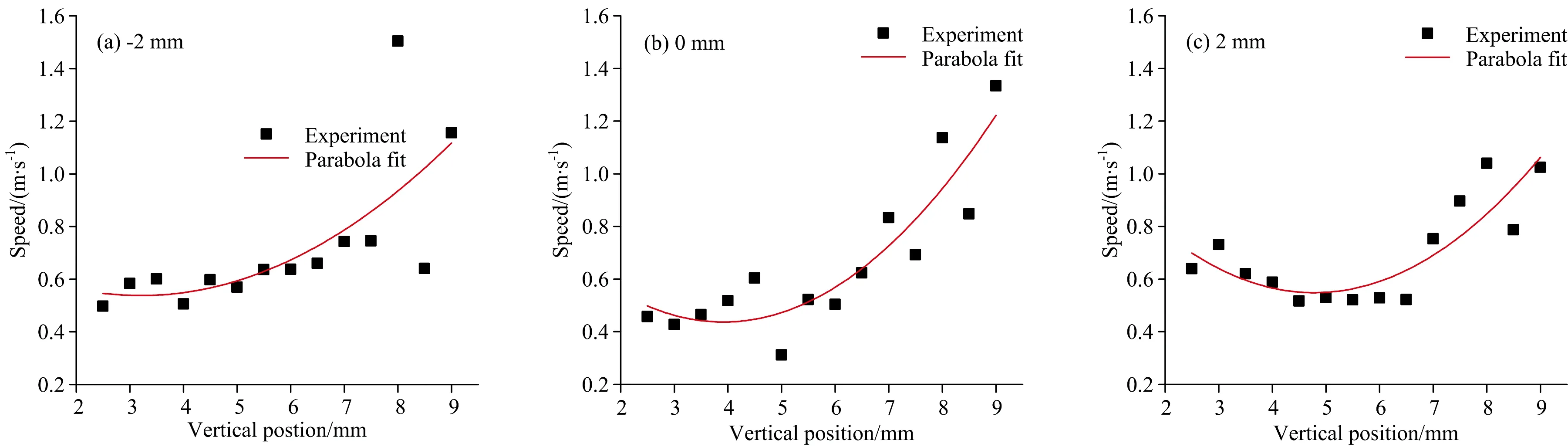
图5 距离竖直中轴线水平间距(a) -2 mm,(b) 0 mm和(c) 2 mm处竖直平面的火焰速度随高度分布Fig.5 Velocity distributions of flame at vertical planes of (a) -2 mm, (b) 0 mm, and (c) 2 mm from center
2.4 泵浦击穿对测量的影响
单脉冲能量为20 mJ的泵浦光经过聚焦后在焦平面的功率密度约为4.5 GW·cm-2,这样的或者更高的泵浦光能量可能会在火焰内部击穿对火焰的本速度产生扰动。此处通过改变泵浦光能量,测量同一平面的速度分布,从而观察泵浦能量对火焰速度的扰动影响。选取距离灯芯高度4 mm处的平面测量速度随位置分布。如图6所示,对同一平面的点,分别采用20,40和60 mJ进行泵浦测量其速度分布。从图6(a,b,c)数据可看出,在40 mJ的泵浦能量时,对火焰速度的扰动约为0.1 m·s-1,当到达60 mJ的泵浦时,由于击穿对火焰的扰动较大,约0.6 m·s-1。测量位置位于击穿点上方,所以对速度的影响是正向的增加。这种扰动对于火焰的中间或偏外部的不同位置效果是一致的。
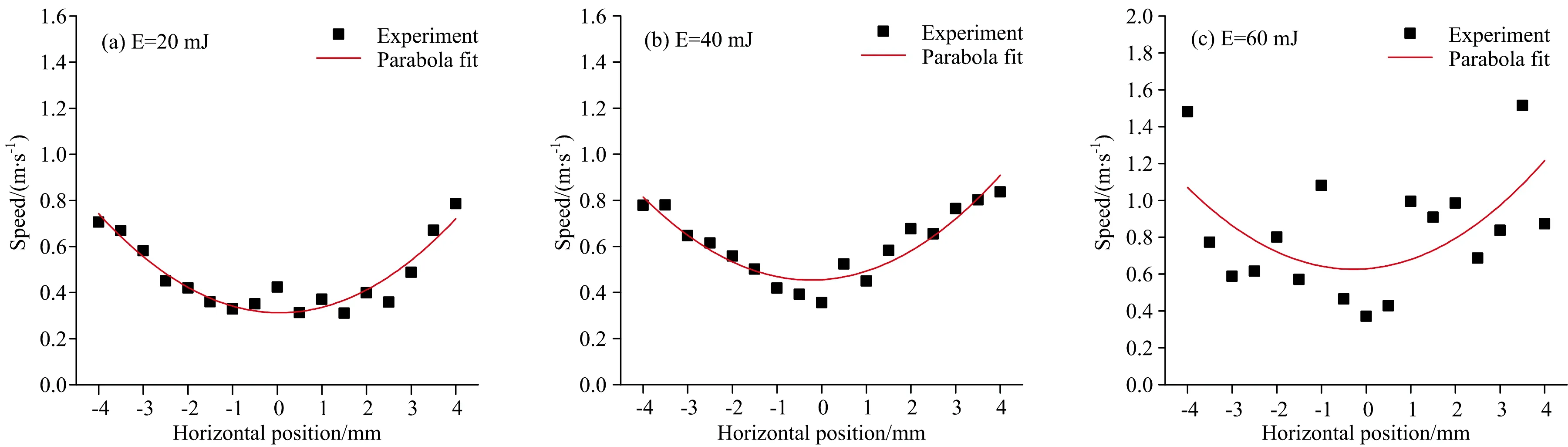
图6 泵浦能量为(a) 20 mJ, (b) 40 mJ和(c) 60 mJ时高度为4 mm处的火焰水平速度分布Fig.6 Velocity distributions of flame at height of 4 mm when pump energy is (a) 20 mJ, (b) 40 mJ, and (c) 60 mJ
3 结 论
基于光热偏转光谱法,利用自建泵浦探测装置测量了煤油火焰不同水平面和竖直面的速度分布,得到的速度值约为0.2~1.5 m·s-1。测量得到的火焰上部和外侧速度快于底部和内部,这在一定程度上反映了燃料未完全燃烧状态、浓度和力学场分布,为进一步研究火焰燃烧过程和诊断提供一定依据。系统空间分辨率为2×10-5cm3并可以通过更小的泵浦光和探测光聚焦光斑以及缩短飞行距离Δz提高,这在一定程度上需要更稳定的泵浦探测系统达到更高的时间分辨率和信噪比,包括能量和指向性稳定、波长更易被吸收的泵浦光源,功率更为稳定的探测光源,信噪比好的差分放大电路。由于泵浦激光的波长是固定的355 nm,并且不是位于火焰某特定成分的吸收峰,为了获得明显的光热偏转信号,需要使用较高的泵浦光单脉冲能量,这就给火焰增加了的额外的扰动甚至击穿。使用可调谐激光将激光波长调谐至火焰的吸收峰可以极大降低泵浦单脉冲能量,提高信噪比。燃料本身的纯度、燃烧过程中的扰动和不稳定性也是影响速度测量精度的主要因素。通过提高系统时间分辨率和信噪比,不但可提高空间分辨率,还将使得利用信号幅值测量火焰中的浓度分布和温度分布信息成为可能,从而得到更为全面的火焰参数分布。
猜你喜欢
音乐天地(音乐创作版)(2022年1期)2022-04-26
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2022年11期)2022-02-14
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
学苑创造·A版(2021年2期)2021-03-11
动漫星空(兴趣百科)(2019年5期)2019-05-11
电子制作(2018年9期)2018-08-04
中国设备工程(2017年24期)2017-12-28
学与玩(2017年6期)2017-02-16
