
基于Gm-APDs的低频激光成像探测实验
2020-11-04 02:35:20宋毅恒张佳悦赵英超1刘学胜王智勇
红外技术 2020年10期
宋毅恒,张佳悦,赵英超1,,刘学胜,王智勇
基于Gm-APDs的低频激光成像探测实验
宋毅恒1,2,3,张佳悦2,赵英超1,2,刘学胜3,王智勇3
(1. 光电信息控制与安全重点实验室,天津 300308;2. 中国电子科技集团公司第五十三研究所,天津 300308;3. 北京工业大学 激光工程研究院,北京 100124)
针对空中快速运动目标远距离成像探测的需求,推导了适用于点目标的光子级激光主动成像探测公式,搭建基于64×64像元Gm-APDs的光子级成像探测系统,通过低频成像探测实验,实现对4.3km处点目标的成像探测。实验结果表明,基于Gm-APDs的低频、光子级回波激光成像探测技术,在无需长时间、多次累积探测的情况下,实现对点目标快速成像探测。为破解对远距离、空中快速运动目标的主动成像探测技术难题奠定基础。
单光子;点目标成像;Gm-APDs
0 引言
雪崩光电二极管(avalanche photodiode,APD)可分为线性模式和盖革模式两种。线性模式是指加在APD器件的反向偏压略低于雪崩电压,器件对光电子信号的放大增益,与偏压大小成近似线性关系。盖革模式是指加在APD器件的反向偏压高于雪崩电压,探测器具有极高的雪崩增益,即使单光子信号入射,也可使探测器输出电流达到饱和。故盖革APD探测器具有单光子探测能力。由于盖革模式APD探测器输出光电子信号电流足够大,无须对探测到的信号做更进一步的高增益放大,使得盖革模式APD探测器的读出电路难度大幅度下降,有利于大规模阵列探测器的集成和制作。盖革模式雪崩光电二极管阵列探测器(Geiger mode avalanche photodiode devices,Gm-APDs)的成功研制,使得激光测距和激光主动成像技术具有更高的探测灵敏度和更远的探测距离[1-5]。
受限于盖革模式APD探测器的单光子探测概率低、暗计数率(DCR)高等因素的制约,现有基于Gm-APDs的激光测距和激光主动成像技术,多采用低峰值功率、高重频激光脉冲发射,之后对少量光子回波信号进行长时间、多次累积,统计出被探测目标的图像和距离信息。上述技术体制,对静止或低速移动目标,可实现极高灵敏度的光子级成像探测。对高速移动目标进行成像探测时,由于缺少长时间、多脉冲积累统计,导致目标的成像质量、探测距离精度以及探测器门控宽度,都受到极大的影响[6]。
针对空中运动目标的远距离成像探测需求,采用64×64盖革模式APD阵列探测器和高能量脉冲激光光源,搭建远距离、低频成像探测实验系统,通过对实验数据分析、研究,验证基于Gm-APDs的低频激光远距离、快速成像探测的可行性。
1 Gm-APDs探测公式推导
由于探测器技术体制的差异,单光子探测系统中的噪声,不同于常规微弱信号探测中需要考虑多种噪声干扰,只需考虑系统背景噪声和探测器暗计数噪声两种。探测器暗计数噪声和天光背景噪声的均值不随时间变化,两者均近似服从Poisson分布。背景噪声和暗计数噪声同时具有明显的互不相关特性,根据Poisson分布的可叠加性,两个噪声的叠加后获得的总噪声仍服从Poisson分布,其均值为两种噪声均值之和[7]。因此,探测器所获取的噪声光子数为的概率可用下式表示:

式中:d为探测器自身暗计数噪声在探测时间内形成的计数光子;b为外部光子入射与探测器自身量子效率乘积产生的计数光子的均值。即:
b=b(2)
1.1 暗计数噪声
Gm-APDs在无光照输入时,也会输出一定频率的计数信号,即为探测器的暗计数。暗计数噪声属于热噪声,器件结构和制作工艺密切相关。对于Gm-APDs阵列探测器的暗计数率的公式,可表述如下:

式中:阵列探测器的总行数和总列数分别为、;、分别为死像元和热像元,求和中不包括无效的像元。DCR(,)={-ln[1-(d(,)/)×g]}/D,D为门选通信号的脉宽,d(,)为一像元第帧的暗计数,计数时间为,门选通信号的频率为g。
1.2 背景噪声
在单光子探测系统中,综合运用光谱滤波、时间滤波和空间滤波等多种技术实现对背景光噪声的抑制,背景噪声源主要来源于日光和强光源等直射或反射,背景噪声公式表述如下:

其中:

式中:为天光背景亮度;为特定波长下窄带滤光片通过的亮度;()为特定波长下的太阳衰减亮度;为特定波长下通过光学系统和窄带滤光片后的功率;为光学系统透过率;FOV1为光学系统视场角;为光学系统口径。可见,窄带滤波片可以有效减小系统接收到的背景噪声强度,从而有效降低系统虚警概率。而探测器的接收视场越大,接收到的噪声强度也越大,对应虚警概率越高[8]。
1.3 Gm-APDs激光雷达方程
激光雷达方程是描述探测系统接收到的回波能量与照射光源、目标、大气介质等参数之间相互关系的表达式。在基于Gm-APDs探测器的激光探测系统中,回波光强较弱,每像元接收到的回波信号为光子量级。因此,适用于以平均光子个数,来表征回波强度的大小,基于Gm-APDs的激光成像模型如图1所示。
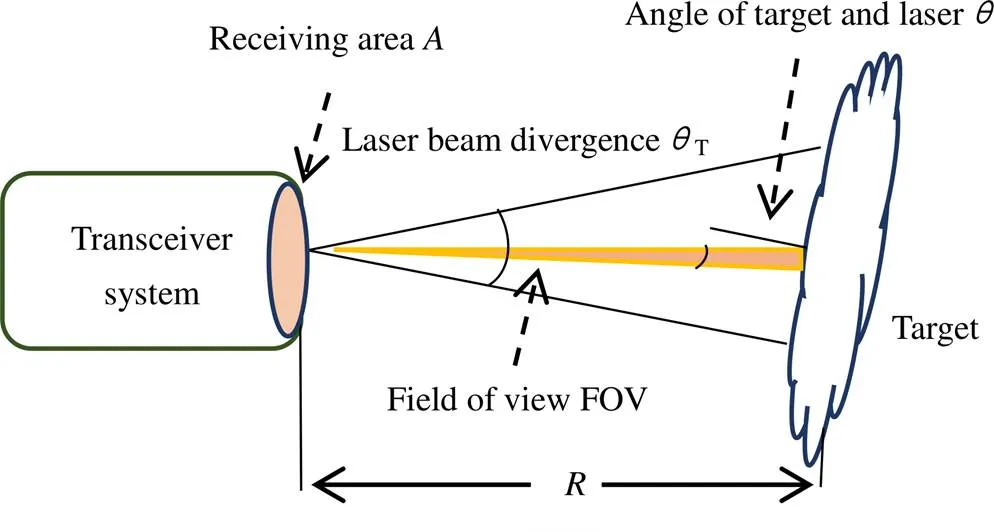
图1 Gm-APDs对扩展目标成像
在激光雷达中,扩展目标即为目标尺寸大于照射光斑的目标,根据测距方程,每个Gm-APDs像元所接收到的激光回波光子数可表示为:

式中:PHO是单个像素接收到的光子数;FOV是单个像素的接收视场角;是光轴与目标表面法线的夹角;E是发射端的激光单脉冲能量;T是发射激光束散角;是目标反射率;R是接收系统孔径面积;T是发射光学系统的透过率;R是接收光学系统透过率;A是大气的单程衰减系数;q是探测器量子效率;ff是微透镜阵列的等效填充因数[9]。
点目标即为目标尺寸小于照射光斑的目标,对点目标的激光测距公式如(7)所示:

式中:R是探测系统接收到的激光回波能量;0为目标反射面积。
激光照射点目标如图2所示,为被照射目标的半径,为照射目标与照射光源所对应的空间夹角。

即:

则单像素视场FOV对应的激光回波能量为RP与目标所对应能量R的关系为:
RP=R×(FOV2/) (9)
由(7)、(8)、(9)式推得基于Gm-APDs激光主动成像单像素对应的激光回波光子数PHO:

可见公式(6)和(10)等同,即推得基于Gm-APDs的激光主动成像系统中,单像素对应的激光回波光子数与被照射目标的尺寸无关,对扩展目标的主动成像探测公式同样适应于对点目标的成像探测。
2 实验及分析
实验选用中电科44所研制的64×64像元Gm-APDs焦平面探测器,该阵列探测器为InGaAs材料,光谱响应谱宽为900~1700 nm;该探测器支持的最低成像帧频为2Hz,因此,本次主动探测实验的帧频选为2Hz。实验中,选用激光光源的波长为1.54mm,束散角T为2mrad,对4.3km距离处的高压线铁架成像(见图3)。探测系统视场为3mrad,有效通光孔径为50mm,则光学系统的有效接收面积R为2.8×10-3m2。
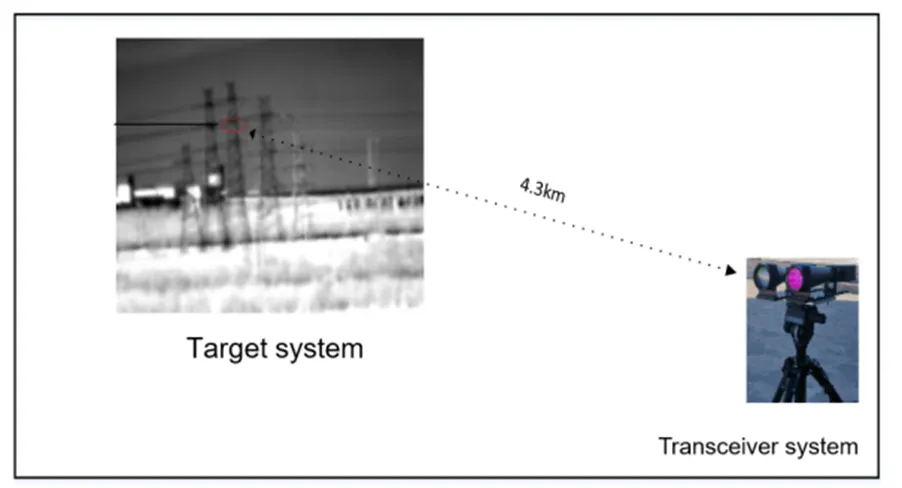
图3 对4.3km处铁架成像探测实验
2.1 噪声光子实验及分析
该Gm-APDs焦平面探测器典型DCR为5kHz,实验门控时间选择为1.01ms,激光发射和成像探测帧频同步,为2Hz低频。由公式(3)知Gm-APDs阵列探测器在门控时间内的全像素暗计数的总数约为41个。
实验时,天光背景亮度为20W×m-2×sr-1,光学系统口径为50mm,窄带带宽为1nm,光学系统视场角FOV1为3mrad,光学系统透过率为0.75。由公式(4)求得,1s时间内通过光学系统照射到Gm-APDs焦平面探测器上的光功率为1.37×10-11W,由于门控时间con为1.01ms,每秒探测帧频为2Hz,探测器像元的等效填充因数ff为60%,阵列探测器单元的量子效率q为20%,根据公式(11)可求得1s时间内到达探测器端的背景光能量b为0.33×10-18J,进而求得光子数为26个:
b=×con×ff×(11)
探测器暗计数噪声和背景噪声的和,即为Gm-APDs光子级阵列探测系统噪声,求得系统噪声产生的总光子数为26+41=67。由公式(1)知,暗计数噪声和背景噪声的均值不随时间变化,且具有明显的互不相关特性,根据Poisson分布的可叠加性,两个噪声的叠加获得的总噪声仍服从Poisson分布。因此,噪声引起的单个像素的响应概率为67/4096≈1.6%。
实验中Gm-APDs探测系统采集到的系统噪声光子图像如图4所示。
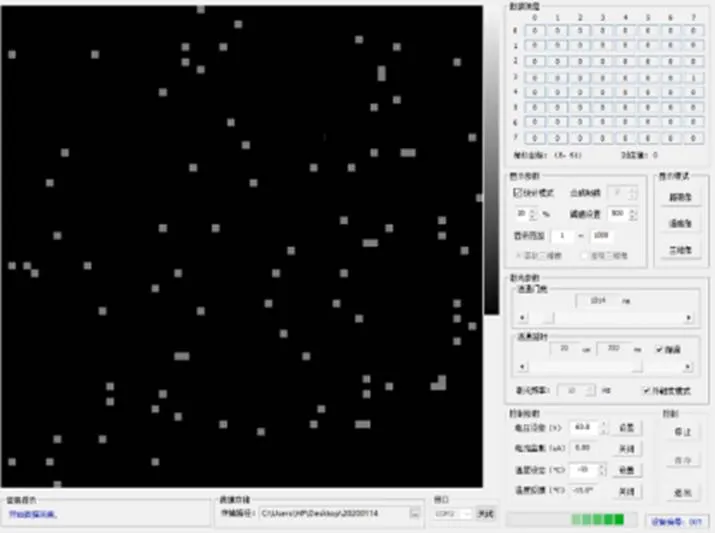
图4 采集到的系统噪声总光子数
由图4可知,每秒2帧采集到的系统总噪声光子,随机出现在探测器像元上,总噪声光子数约为70个,采集到的光子数量与理论算取的光子数值基本等同,在误差范围内。
2.2 低频回波光子实验及分析:

实验中,激光光源的发射频率为2Hz,Gm-APDs阵列探测系统通过对2帧数据的采集,合成一副图像显示。图5中亮度较强的像素为2帧采集的数据中对应的像元皆有回波光子,且每一次都触发该像元的有效探测。亮度稍弱的像素,为只有一帧像素对应的像元被有效触发探测。上述公式求得相应像元对应的回波光子数为8个,回波光子数与探测概率的对应关系为:
()=1-(1-q)

图5 光子级激光回波图像
理论上相应像素的单次回波探测概率接近83.2%,即单脉冲对目标形状成像的有效率应为83.2%。实验结果显示,实际成像率约60%,即等效为频率1Hz单脉冲成像的探测概率为60%。经分析,引起此结果的主要因素是,视场内大部分高压线铁架投影的有效尺寸不够大,导致实际回波光子少于单像元成像所需的数量。因此,部分高压线铁架回波信号落在探测像元上的光子数少于8个,与83.2%的探测概率有一定差距,导致成像时出现亮度稍弱像素点。
3 结论
基于64×64阵列Gm-APDs的光子级低频成像探测实验,采用单脉冲能量6mJ、频率2Hz的低频激光,实现对4.3km处高压线铁架目标的快速成像探测。依据本次实验可推得,当采用1Hz单脉冲进行成像时,探测概率约为60%,实验结果与理论分析相符。单脉冲实时成像技术,可以克服多次回波统计技术体制在测距精度、图像清晰度及成像实时性等方面的不足,为实现对空中快速运动目标的远距离成像探测提供技术支撑。
[1] Marino R M, Stephens T, Hatch R E, et al. A compact 3D imaging laser radar system using G-APD arrays system and measurements[C]//VIII, 2003, 5086: doi. org/10.1117/12.501581.
[2] 王帅, 孙华燕, 郭惠超, 等. APD阵列单脉冲三维成像激光雷达的发展与现状[J]. 激光与红外, 2017, 47(4): 390-399.
WANG Shuai, SUN Huayan, GUO Huichao, et al. The development and current status of APD array monopulse 3D imaging lidar[J]., 2017, 47(4): 390-399.
[3] Rothman J, Foubert K, Lasfargues G. High operating temperature SWIR HgCdTe APDs for remote sensing [C]//, 2014, 9254: 92540P.
[4] Piccione B, JIANG Xudong, Itzler M A. Spatial modeling of optical crosstalk in InGaAsP Gerger-mode APD focal plane arrays[J]., 2016, 24(10): 10635-10648.
[5] 孙剑峰, 姜鹏, 张秀川. 32×32面阵InGaAs Gm-APD激光主动成像实验[J]. 红外与激光工程, 2016, 45(12): 3181-3184.
SUN Jianfeng, JIANG Peng, ZHANG Xiuchuan. 32×32 array InGaAs Gm-APD laser active imaging experiment[J]., 2016, 45(12): 3181-3184.
[6] 徐璐, 张勇, 张宇, 等. 四Gm-APD探测器提高激光雷达探测性能的研究[J]. 红外与激光工程, 2015, 44(9): 2583-2587.
XU Lu, ZHANG Yong, ZHANG Yu, et al. Research on improving the detection performance of lidar by four Gm-APD detectors[J]., 2015, 44(9): 2583-2587.
[7] Fouche D G. Detection and false-alarm probabilities for laser radars that use Geiger-mode detectors[J]., 2003, 42(27):5388-5398.
[8] Marino R M, Davis W R. Jigsaw: A foliage -penetrating 3D imaging laser radar system [J]., 2005, 15(1): 23-36.
[9] 方照勋, 张华, 李海廷,等. 基于Geiger-mode APD的激光雷达性能分析[J]. 激光与红外, 2011, 41(10): 1092-1097.
FANG Zhaoxun, ZHANG Hua, LI Haiting, et al. Laser mine based on Geiger-mode APD performance analysis[J]., 2011, 41(10): 1092-1097.
Low-Frequency Laser Imaging-Detection Experiment Based on Gm-APDs
SONG Yiheng1,2,3,ZHANG Jiayue2,ZHAO Yingchao1,2,LIU Xuesheng3,WANG Zhiyong3
(1.,300308,;2.53,300308,; 3.,100105,)
A photon-level imaging-detection system is developed based on 64´64 pixel Geiger-mode avalanche photodiodes(Gm-APDS). By performing a low-frequency imaging-detection test, imaging detection of a point target 4.3 km away is realized. The experimental results show that the low-frequency photon-level echo laser imaging-detection technology based on Gm-APDS can quickly image and detect point targets without requiring long-term and multiple cumulative detections. This study lays a good technical foundation for the active detection of long-distance fast-moving targets in air.
single photon, point target imaging, GM APDS
TN219
A
1001-8891(2020)10-0936-04
2020-07-08;
2020-08-21.
宋毅恒(1979-),男,甘肃人,博士。主要研究方向:激光技术方向,E-mail:33nature@163.com。
猜你喜欢
通信电源技术(2024年2期)2024-04-07 14:35:26
光子学报(2022年11期)2022-11-26 03:43:44
民用飞机设计与研究(2019年4期)2019-05-21 07:21:30
成都信息工程大学学报(2018年4期)2019-01-23 06:57:24
电子制作(2018年23期)2018-12-26 01:01:02
传感器与微系统(2018年7期)2018-08-29 00:44:20
地震研究(2017年3期)2017-11-06 23:38:05
应用海洋学学报(2015年1期)2015-11-22 07:19:32
湖南师范大学自然科学学报(2015年1期)2015-02-27 14:50:05
机械制造与自动化(2014年1期)2014-03-01 04:21:57
