基于双目视觉的仿生机器鱼路径规划研究
2020-11-04 06:54杨静
无线互联科技 2020年13期
杨 静
(沈阳科技学院,辽宁 沈阳 110000)
0 引言
海洋覆盖地球一半以上的表面积,是所有生物生命的起源,人类的生活与生产也越来越离不开海洋。当前海洋事业得到了快速的发展,工作环境也越来越复杂,对于水下的探索运载工具的要求也逐渐提高[1]。仿生学是一门专门研究并模仿自然界中各类生物特殊本领的学科,对于生物的形态、运动、视觉等均可进行模仿。仿生机器鱼是一种模仿鱼类在水中游动的推理机理,同时结合电子领域、控制领域、机械领域等多领域学科,实现在水中进行推进的运动机器人[2]。仿生机器鱼在实际应用中具有机动性强、噪声低、效率高、扰动小等优势。但水下工作环境日益复杂化和特殊化,使得仿生机器鱼的路径规划很难直接移植工业机器人、移动机器人的规划方法,实现对仿生机器鱼的控制。因此,本文通过结合双目视觉技术,提出一种全新的仿生机器鱼路径规划方法。
1 基于双目视觉的仿生机器鱼路径规划设计
1.1 基于双目视觉的仿生机器鱼运动控制
在仿生机器鱼运动过程中,采用双目视觉技术,将对应的坐标值、速度大小以及转动角度等参数控制其运动。利用双目视觉传感器完成视频信号采集、无线传输、帧同步等功能,并将采集到的图像信息转换为仿生机器鱼能够进行识别的统一格式,方便对图像进行处理[3]。在跨平台计算机视觉和机器学习软件库中,对图像分析、结构分析以及运动分析分别进行定义,由于流媒体处理开发包中获取到的图像采样是一段在内存中连续地满足特殊格式的空间,而视觉与机器学习库中的图像格式通常为IplImage格式。因此,本文在对仿生机器鱼进行运动控制时,将双目视觉传感器采集到的视频图像格式均转换为视觉与机器学习库可识别的IplImage格式[4]。在仿生机器鱼运动过程中,采用多目立体视觉测距的方法,假设目标点为T,P1和P2分别表示为目标点两侧相同焦距的摄像头光心,T1和T2分别表示为空间中目标点在左右摄像头中映射的投影点,l表示为目标点到摄像头之间的距离,即仿生机器鱼运动深度值。结合相似三角形定理得出如下公式:
(1)
公式(1)中,f表示为摄像头的焦距;b表示为摄像头景深;m+n表示为空间目标点在两个摄像头当中的视觉差。通过双目摄像头测距可将原本三维空间中的深度值转换到二维图像中,从而方便找寻与目标点对应的匹配点。
1.2 防碰撞路径规划
为保证在仿生机器鱼运动过程中对障碍物自动避让并形成运动路径,本文以图1为例,对仿生机器鱼防碰撞路径进行规划。

图1 仿生机器鱼障碍避让路径示意图
图1中8,11,15,19均表示为仿生机器鱼在运行过程中会遇到的障碍,仿生机器鱼的位置由起始点开始,分别从1,2,3,10,16目标点对障碍物进行躲避。结合遗传算法,将初始种群设为遗传算法的起始点,由一定数目的个体组成初始种群,为了使该防碰撞路径规划具有全局最优性,要求初始种群应当随机分布在需要进行搜索的海域空间中[5]。采用剪短无障碍路径的方式,对初始种群进行选择,再根据个体适应度函数得出:
(2)
公式(2)中,x表示为个体在通过栅格模型的栅格数量总和;A表示为两个相邻个体之间的直线距离之和。将公式(2)作为修正项,利用其对仿生机器鱼运行过程中中间断点太远的路径进行消除,从而获取适应度最高的防碰撞规划路径。
2 实验论证分析
通常情况下,仿生机器鱼的程序运行环境为微软Visual Studio .NET 1708C++。因此,为验证本文提出的基于双目视觉的仿生机器鱼路径规划设计的应用优势,需要根据本文双目视觉组成在C++环境当中完成对仿真实验的编写,从而判断本文路径规划方法与传统路径规划方法的可行性。在仿真实验环境中设置多个障碍物,分别利用结合本文规划方法的仿生机器鱼与传统规划方法的仿生机器鱼在该水域环境中进行运动,将两种运动结果绘制成如图2所示的实验结果对比图。
从图2可以看出,结合传统规划方法的仿生机器鱼在运行过程中分别在图中两个位置出现了与障碍物碰撞,重新规划路线的问题,而结合本文规划方法的仿生机器鱼在运行过程中可以平稳完成运行达到目标点。由于两种仿生机器鱼的运行速度相同,但传统规划方法中出现了两次碰撞会增加运行时间,因此二者相比,本文规划方法的仿生机器鱼到达目标点时的用时更短。因此,通过实证证明,本文设计的基于双目视觉的仿生机器鱼路径规划方法的规划路径更合理,能够满足仿生机器鱼在水中的运动过程中不发生碰撞,顺利到达目标点。
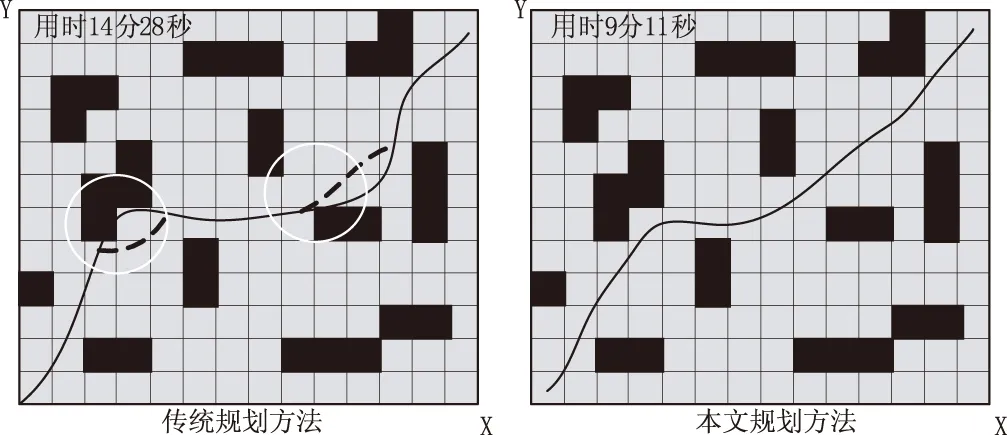
图2 实验结果对比图
3 结语
路径规划在移动机器人技术领域中,尤其是仿生机器鱼的路径规划一直是一个热点和难点。本文通过结合双目视觉技术,提出一种全新的仿生机器鱼路径规划方法完成了在静态的全局环境中进行全局路径的有效性和优越性规划。在后续的研究中还将针对在不同环境下的仿生机器鱼路径进行规划设计,从而实现仿生机器鱼在未知环境中对动态障碍物的避让。
猜你喜欢
中国交通信息化(2022年9期)2022-10-28
环球时报(2022-07-13)2022-07-13
环球时报(2022-03-14)2022-03-14
汽车工程师(2021年12期)2022-01-18
电子制作(2019年20期)2019-12-04
电子测试(2018年13期)2018-09-26
电影(2018年8期)2018-09-21
现代计算机(2016年11期)2016-02-28
机械与电子(2014年2期)2014-02-28
空间控制技术与应用(2010年3期)2010-12-23