
基于T 型三电平的ROV 中频供电电源研究
2020-10-30 05:49廖津余刘浩平
科学技术创新 2020年31期
廖津余 彭 勃 刘浩平
(中车株洲电力机车研究所有限公司,湖南 株洲412001)
人类对海洋的探索及资源获取已逐渐由浅海转向深海,其中遥控水下机器人(Remotely Operated Vehicle,简称ROV)是人类认识、开发海洋的有力工具之一,广泛应用于资源勘探、科学考察、水下施工、海洋救助与打捞等[1]。按功能可将ROV 分为观察级ROV 和工作级ROV,目前在水下作业领域应用最为广泛的是工作级液压ROV[2]。
ROV 系统是一套完备的作业系统,可分为水面遥控支持系统和水下潜器系统。水面遥控支持系统包括布放系统(A 架、绞车、液压泵站)、控制集装箱、工具集装箱,它们都布放在甲板上。水下潜器系统包括TMS(Tether Management System)和ROV 本体。A 架和绞车负责将“ROV+TMS”吊放至水中,控制集装箱负责ROV 在水下的远程遥操作,工具集装箱负责ROV 系统的维护[3]。

图1 ROV 系统
水面遥控支持系统占用了较多珍贵的母船甲板面积,另外,ROV 的作业方式(需要母船)决定了每次执行作业任务的成本都相当高昂,减小ROV 系统体积和重量有利于用更小的母船进行作业,这意味着大幅降低作业成本,因此提高ROV 系统功率密度,减少体积和重量成为一个重要发展趋势。同时,ROV 系统造价高昂,一旦丢失将损失非常惨重,因此对ROV 系统的可靠性具有很高的要求;ROV 系统的用能效率也直接影响运营成本,同时还直接影响供电系统和布放系统的体积和重量。
因此对于工作级ROV 系统,包括其供电系统,提高功率密度(小体积/重量)成为重要发展趋势,同时还要保证高可靠性、高能效。
1 ROV 供电系统分析
1.1 既有ROV 供电系统介绍
ROV 供电系统是整个ROV 的动力和控制的能量来源。深海作业使用的脐带缆通常很长,常见的包括3000 米、6000 米、甚至可达10000 米及以上[1],为降低输电损耗,通常将ROV 供电电压升到3000V~4160V 左右进行传输。
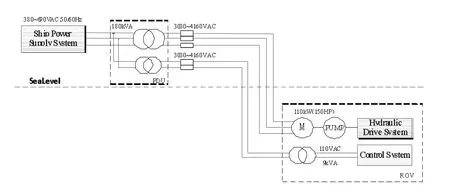
图2 150HP 工作级液压ROV 供电系统
以典型的150HP 工作级液压ROV 不带TMS 的供电系统为例(如图2),来自母船的50/60Hz 三相交流电输入配电柜(Power Distribution Unit,简称PDU),在配电柜内独立出一路单相作为ROV 的控制电,动力电(三相)和控制电(单相)在柜内分别经过变压器升压后由脐带缆输送给水下的ROV。ROV 一侧,其主电机(中压异步电机)直接由输送下来的3000~4160VAC 电压驱动;控制电则经过水下变压器降压至110VAC 后供给ROV 控制系统。若母船提供的是400Hz 的交流电或者380V~640V 的直流电,需要增加AC/AC 或者DC/AC 变流装置转成50/60Hz。上述150HP 液压ROV 供电系统的参数如表1:

表1 150HP 工作级液压ROV 配电参数
1.2 中频化分析
中频电源(常用400Hz)相比50Hz/60Hz 的工频电源,其最大的优点便是由于频率的提高,可以大大减小输出变压器、滤波器的体积,从而大大提高功率密度[6],这对于对体积、重量敏感的设备而言具有重要意义,因此在航空航天、军舰、机车、雷达、声纳等设备上得到了广泛应用[5],如民航客机的主要电源一直是3相400Hz/115V 交流电源。因此中频化是提高ROV 系统功率密度非常有效的手段。
但是,中频化也会带来一些问题。在开关频率相同的情况下,400Hz 中频输出脉冲波头数是50Hz 工频的1/8,为保证输出波形质量(通常THDu≤5%),需要提高开关频率,而这又会带来开关损耗的增加,从而降低ROV 系统的能效。
2 ROV 中频供电电源研究
结合ROV 供电系统发展趋势,本文依托某项目进行ROV中频400Hz 供电电源的研制,该中频电源要求具备高可靠性、高功率密度、高效率,此外还具有以下应用特点:
a. 直流输入,额定容量260kVA,具备50%系统冗余;
b. 实际应用中会有同时给多种型号ROV 供电的工况,其中对一些重型液压ROV 需要具备软起动功能。
2.1 主电路拓扑研究
2.1.1 中频电源既有拓扑分析
目前在ROV 供电领域,还未有采用中频供电的案列,中频电源在舰船、航空航天应用较多,在这些领域中的三相中频电源主要采用了两种拓扑:3 个单相组合式拓扑和三相桥式拓扑。其中三相桥式拓扑又可分为两电平拓扑和多电平拓扑。
3 个单相组合式拓扑[7],其特点是每相独立,控制上完全解耦,带不平衡负载能力强;但这种拓扑开关管数量是三相桥式拓扑的一倍,且必须使用三个单相变压器来把三个单相组合成三相,滤波器也相互独立,这不利于紧凑设计,导致电源体积、重量大。

图3 3 个单相组合式拓扑
三相桥式两电平拓扑应用成熟,开关器件数是3 个单相组合式的一半,但在中频400Hz 下,为满足波形质量要求,需要较高的开关频率(≥12kHz)[5],这会带来较大的损耗,使电源效率降低;若使用多重化的方式来降低开关频率,又会使体积、重量严重增加。

图4 三相桥式两电平拓扑
多电平拓扑相比两电平具有更小的总谐波畸变,这不仅可以减小滤波器体积,还可以用较低的开关频率获得等同的波形质量,有利于降低开关损耗。但多电平拓扑增加了开关管数量,电平数越多开关管数量越多,使得可靠性降低、控制复杂度增加,因而多电平拓扑中应用最广泛的是三电平拓扑。在三电平拓扑中,相比二极管钳位型、飞跨电容型,T 型三电平拓扑具有高效率、高功率密度等优势,在光伏等新能源领域已有成熟应用,且在一些高功率密度中频电源设计中也被作为首选拓扑[8][9]。

图5 T 型三电平拓扑
因此,在功率密度、效率、波形质量的综合约束下,本文选择T 型三电平作为ROV 中频供电电源的逆变拓扑,使中频电源在获得高功率密度的同时不损失波形质量和高效率。
2.1.2 主电路拓扑
为保证ROV 供电电源的可靠性,考虑采用多个功率组件进行并联实现冗余供电,并联设计可降低每个功率组件的运行负荷,较容易获得大容量,也可降低变流器设计难度。每个功率组件由T 型三电平变流器、LC 滤波器和升压变压器组成,单个容量100kVA,如图5。考虑实现50%系统冗余,采用两路独立的电源输入。考虑液压ROV 的软起动需求,电源需具备定频定压和软起动两条三相输出支路。主电路拓扑设计如图6。
主电路的输入来自船舶的直流电网,两路直流输入相互独立并配备接触器,每一路直流输入后级分别供给两个功率组件,保证每路直流输入可以同时具备定频定压和软起输出,实现50%的系统冗余,当其中1 路发生故障时可分断其接触器,维持另一路的运行。另外,将同一直流母线上的两个变流器中性点相连,可以使它们的中点电位保持一致,提高功率组件并联运行时的均流性。
主电路的输出端,为了发挥出并联功率组件的最大优势,考虑使每个功率组件都可具备两种输出模式,通过输出接触器将每个功率组件选择性接入软起输出支路或定频定压支路,从而使得中频电源的输出模式可以非常灵活地配置:
a. 每个功率组件都可配置为软起输出或定频定压输出;
b. 软起支路和定频定压支路的额定输出频率、额定输出电压都可独立配置(不并网);
c. 软起支路可选择是否与定频定压支路并网。
电源未发生故障的情况下,根据所配置的软起、定频定压功率组件数量,以及软起支路是否与定频定压支路并网,可组合得到以下8 种输出模式:
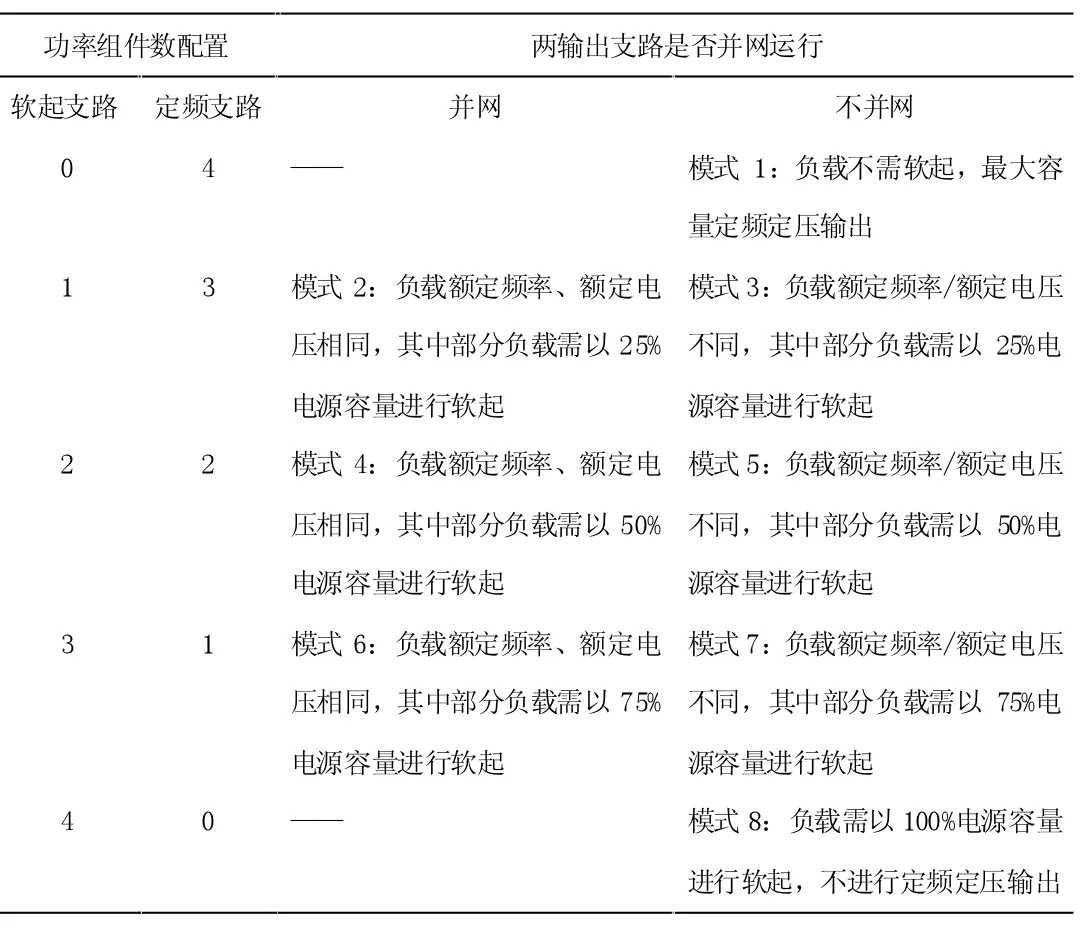
表2 电源输出模式
当中频电源发生故障导致某些功率组件不可用时,重新配置软起支路和定频支路的功率组件数量,进行输出模式调整。
2.2 工作流程研究
本文ROV 中频电源的功率组件数量多、输出模式配置丰富,需对其工作流程、状态迁移过程进行研究,合理地控制中频电源的运行。
2.2.1 工作流程图
将ROV 中频电源的工作流程分为五个阶段,分别为停机阶段、充电阶段、启机阶段、运行阶段、故障处理阶段,电源状态在这五个阶段之间循环转移。
a.停机阶段:该阶段主要等待用户进行表2 中输出模式的设置,控制系统根据电源状态判断是否接受设置。
b.充电阶段:该阶段完成对直流支撑电容充电,充电完成时合相应接触器,为启机做准备。
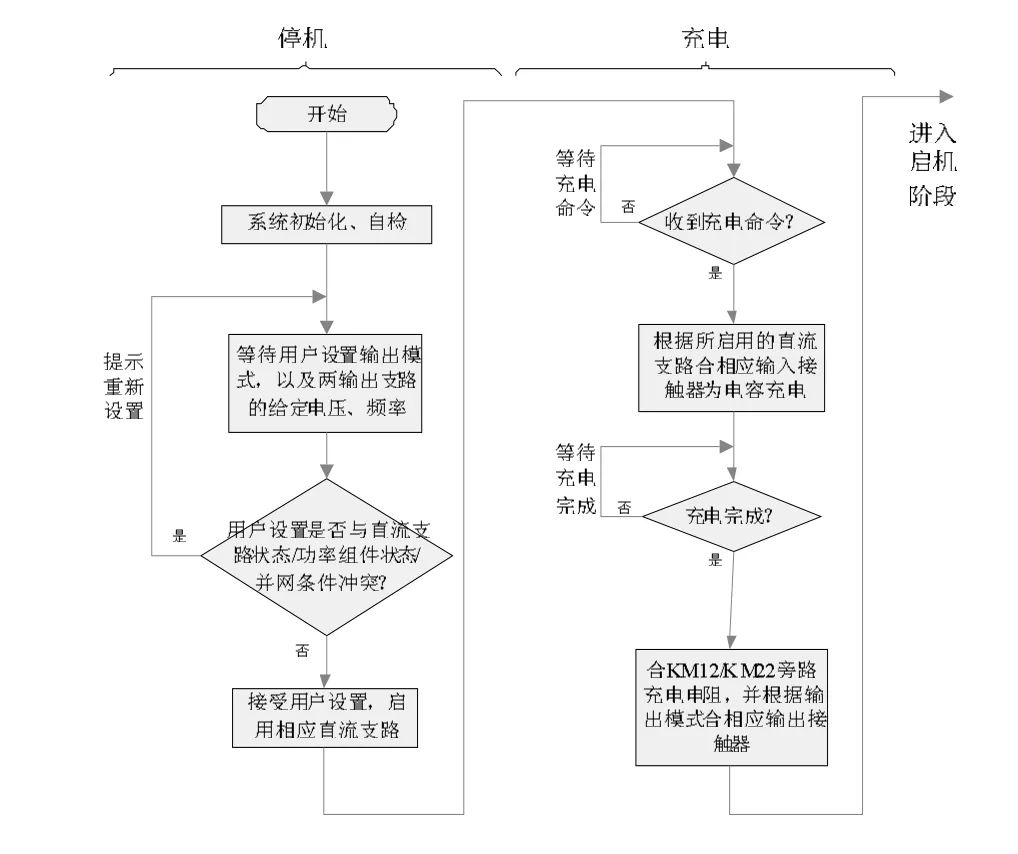
图7 停机和充电阶段
c.启机阶段:该阶段主要完成中频电源的启动,根据所配置的输出模式完成从停机到额定频率、额定电压输出。
d.运行阶段:该阶段为中频电源正常稳定运行阶段。
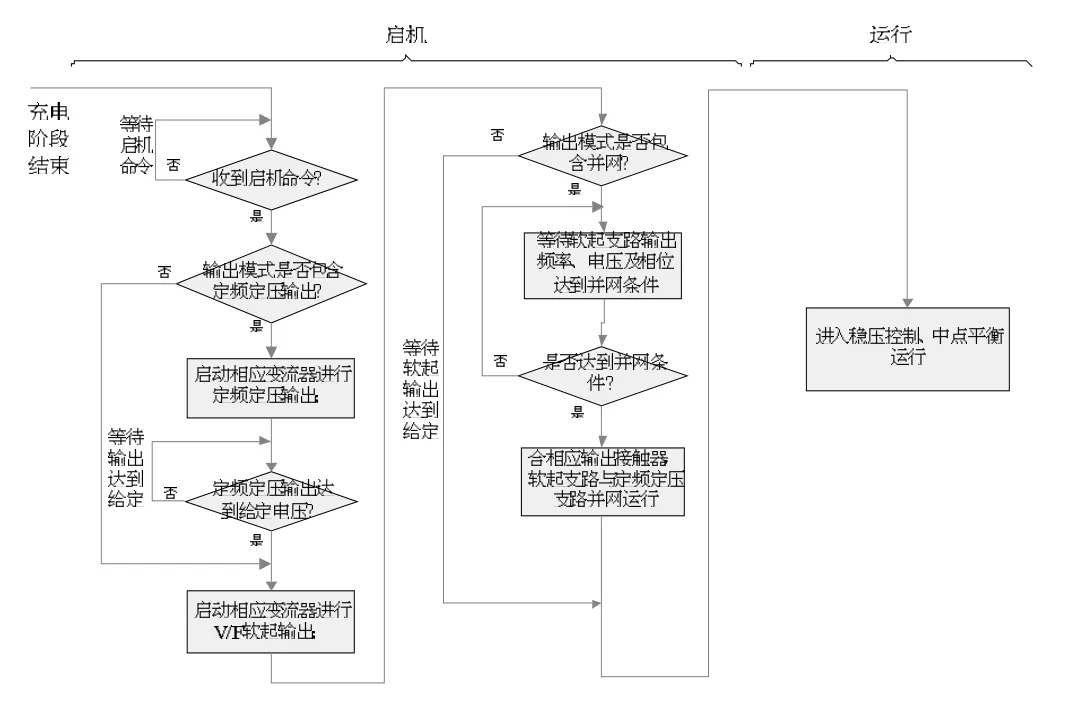
图8 启机和运行阶段
e.故障处理阶段:控制系统实时检测中频电源状态,发生故障时进入该阶段,按照故障级别进行相应处理。
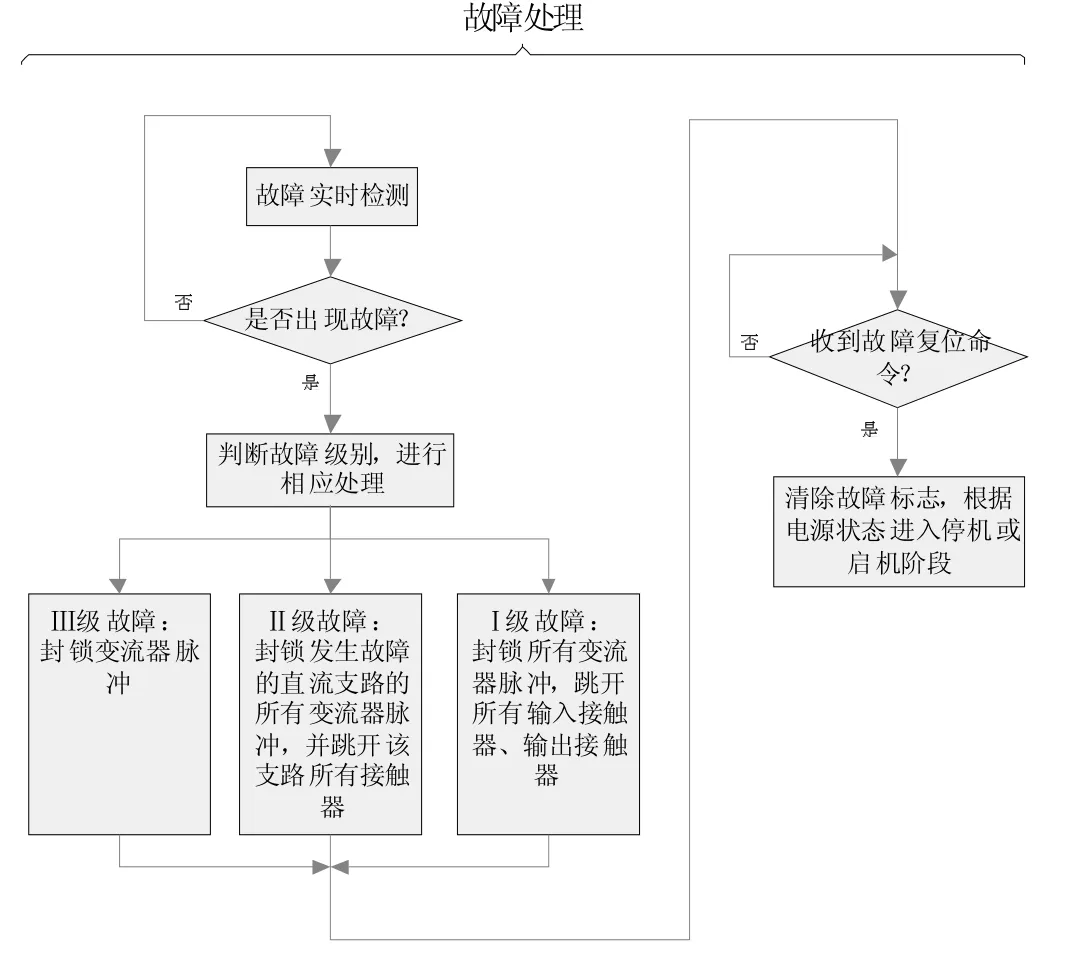
图9 故障处理阶段
2.2.2 仿真验证
此处着重对上述启机过程进行仿真验证,包括两输出支路独立运行和并网运行。为减小仿真规模,在PSIM 软件中搭建2功率组件并联仿真模型,如图10。
图11 为两输出支路独立运行的启动过程波形。从上至下分别为:两输出支路线电压,直流支路1 上、下桥臂电压,直流支路2 上、下桥臂电压。从图中可以看出,功率组件1 和2 分别输出定频、变频电压,互不影响;且由于两功率组件中点相连,它们中点电位波动完全一致。
图12 为两输出支路并网运行时的启动过程波形。从上至下依次为:两输出支路线电压,变流器1、2 输出电流,直流支路1上、下桥臂电压。0~0.27s,两功率组件输出电压的相位和幅值不一致。0.27~0.33s,功率组件2 以功率组件1 输出电压作为锁相参考,逐渐调整电压相位和幅值。0.33s~0.35s,两功率组件同步成功后,闭合功率组件1 的软起支路开关和功率组件2的定频支路开关,完成两输出支路并网。
2.3 中点电位平衡控制
包括T 型三电平在内的中点钳位型三电平变流器都存在直流中点电位波动的问题,目前相关研究已比较成熟。本文考虑采用零序电压注入法,其基本思路为:在调制波中注入零序分量来调整流入或流出直流电容中点的电流,从而控制中点电位的波动。
主电路中由于将同一直流支路的两个变流器中点相连,使这两个变流器的中点电位波动完全一样,因此每条直流支路可以只采样一组正负电压值,而对该支路上的变流器的中点平控制是一致的。
图13 为中点平衡控制仿真波形(各图标含义同前文所述)。可以看出,在平衡控制算法起动前,各支撑电容电压有较大的偏差;在0.2 时刻起动中点平衡控制算法后,各支撑电容电压偏差迅速减小到4V 以内,有效抑制了中点电位波动,同时变流器输出电流波形畸变也有所改善。
结束语
本文针对ROV 系统的应用特点,指出高功率密度是ROV 系统及其供电系统的重要发展趋势,而中频化可满足这一发展需要;通过对比分析中频电源常用拓扑结构,指出T 型三电平拓扑在中频化下相比其它拓扑在效率、功率密度方面更具优势,并以T 型三电平为基础对其输出模式、工作流程、中点电位平衡等进行了相关研究,通过仿真和试验验证了其可行性,对样机测试的结果验证了本文所提出的ROV 中频供电电源在大大提高功率密度的同时,保证了供电的可靠性、波形质量和高效率。
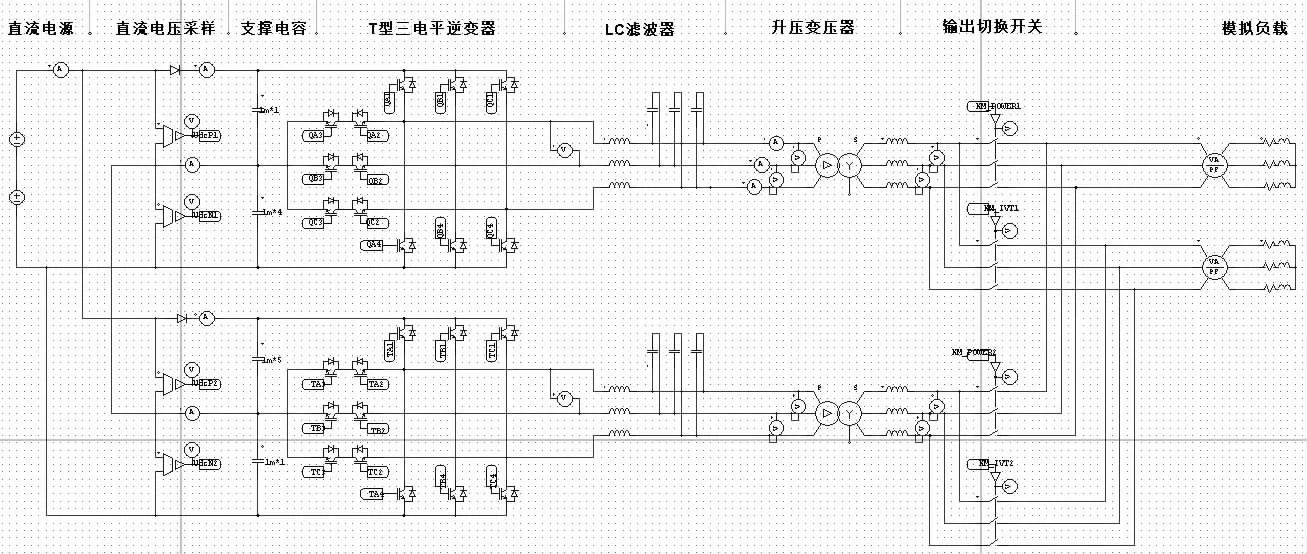
图10 仿真模型

图11 两输出支路独立运行启动过程
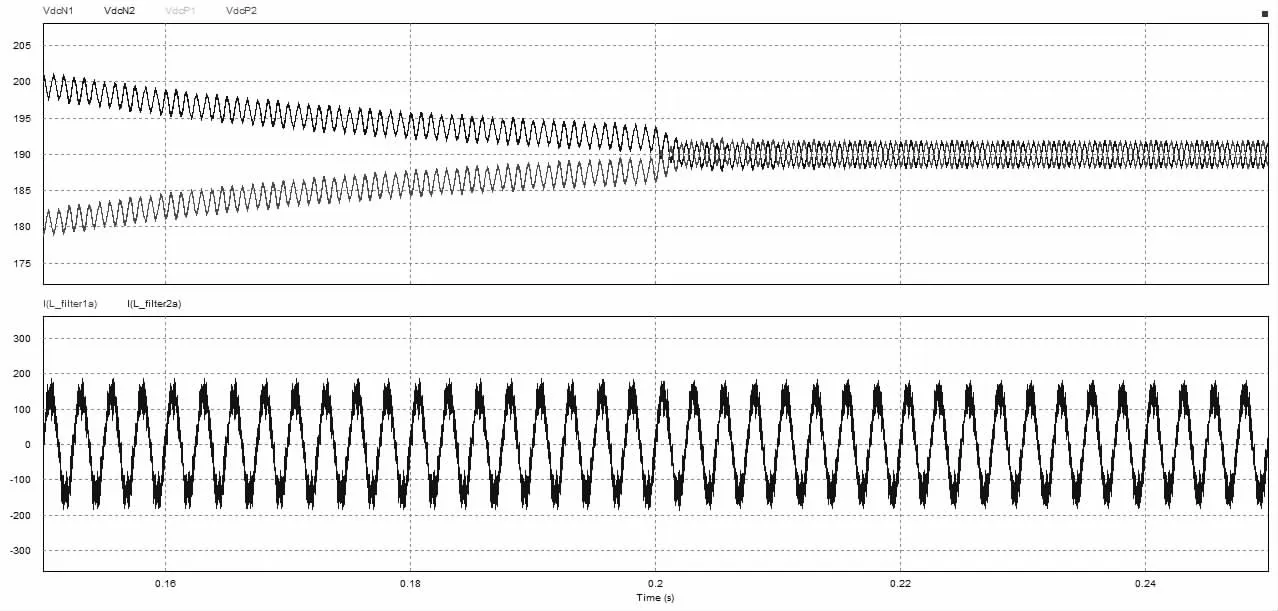
图13 中点电位平衡控制
猜你喜欢
西安石油大学学报(自然科学版)(2022年5期)2022-10-08
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
军民两用技术与产品(2021年5期)2021-07-28
铁道机车车辆(2021年3期)2021-07-12
电子制作(2019年10期)2019-06-17
电机与控制学报(2018年9期)2018-05-14
科技与创新(2017年7期)2017-05-13
汽车维修技师(2016年11期)2016-05-05
火控雷达技术(2016年3期)2016-02-06
