
基于WIFI 的景区游船控制系统设计
2020-10-30 05:49徐丽涵董若凡李京鹏喻汉指导老师
科学技术创新 2020年31期
徐丽涵 董若凡 李京鹏 喻汉 朱 涛(指导老师)
(台州学院,浙江 台州318000)
随着国民经济的增长和人民生活水平的逐步提高, 人们各种各样的旅游需求也随之迅速增加。水上客运旅游化发展已成为水路客运转型升级、可持续发展的必由之路。人工驾驶的基础也造成了户外游船乘坐成本的居高不下;而降低成本,提升景区游船乘坐的娱乐性也成了当前成为当前亟待解决的问题。而基于WIFI 的景区游船控制系统设计可以解放人工提高经济效应,提高景区游船的娱乐性等是解决上述问题的可靠途径,因此对于景区游船的智能化控制也是必不可少的。
游艇的电子自动导航系统在很久以前就已经被开发应用了, 这类系统可以使再受到外部的影响较小时可以维持自动驾驶的功能,并且可以为驾驶员节省出大量的个人时间来休息,减轻驾驶员的工作负担,减少了意外事故发生的可能性。作为一种新兴的高新技术,自动驾驶及预警呼救技术涉及人机工程、人工智能、数据通信等众多领域因而在中国的景区发展中的作用还较为薄弱。对于国内的景区游船而言有着较多的问题比如管理不够规范、同质化竞争激烈、发展不均衡等,这些都造成了国内发展的缓慢和市场的空缺。
而本设计系统是以手机APP 为基础的自动驾驶及安全预警系统,即能够填补中国内地市场的空缺,又能提供一个自动驾驶的新型发展方向。本设计系统能够实现较小范围内景区游船的自动驾驶,而通过手机APP 来控制游船又提升的乘船的娱乐性。手机APP 中可以规划多条路线,游客通过下载APP 后可以选择自己的想要游玩的路线,游船就可以按照规划的路线行驶。而当一端的游船数量不够后游船就可以自动地返回, 游船相互之间有着GPS 信号当游船在同一条路线上时, 回程的游船将会改变路线以防止游船的相撞。
1 基于WIFI 的景区游船控制系统设计的基本原理
景区游船控制系统的结构:
分析图1 可知景区游船控制系统主要由:单片机系统、手机APP、随动控制系统、数据传输模块、GPS 定位系统、WiFi 和SIM卡模块组成。控制器上的定位系统将船的位置通过移动网络传输到手机APP, 手机APP 可以分为驾驶员模式及游客模式,无论是游客端还是驾驶员端都可时刻监测船的位置与航线。驾驶员端还可以通过手机APP 传递信号控制随动控制系统(自动驾驶时的信号则可利用电罗经检测船舶实际航向α,然后与给定航向K°进行比较,其差值作为操舵装置的输入信号,使操舵装置动作,改变偏舵角β。在舵角的作用下,船舶逐渐回到正航向上。船舶回到正航向后,舵叶不再偏转)到控制器,再通过控制器控制电机以及电动推杆,电机控制航速,电动推杆控制航角。
2 仿真及实物测试
2.1 无线通信技术的选择
目前行业中常用的无线通信技术主要有蓝牙、WIFI 、SIM卡等一些通信方式。针对这几种常见的无线通信方式,进行总结比较,其比较结果如表1 所示。
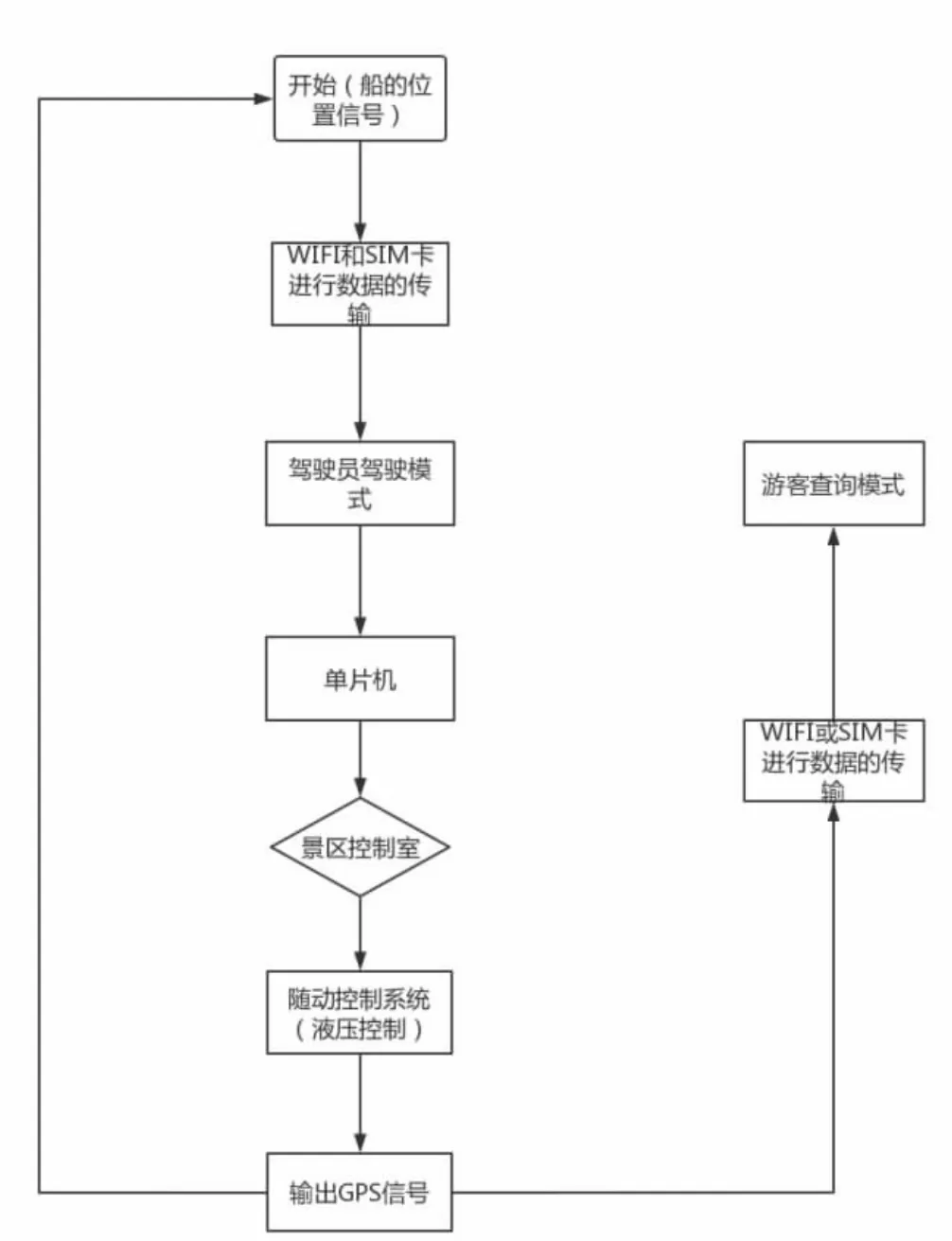
图1 景区游船控制系统的结构
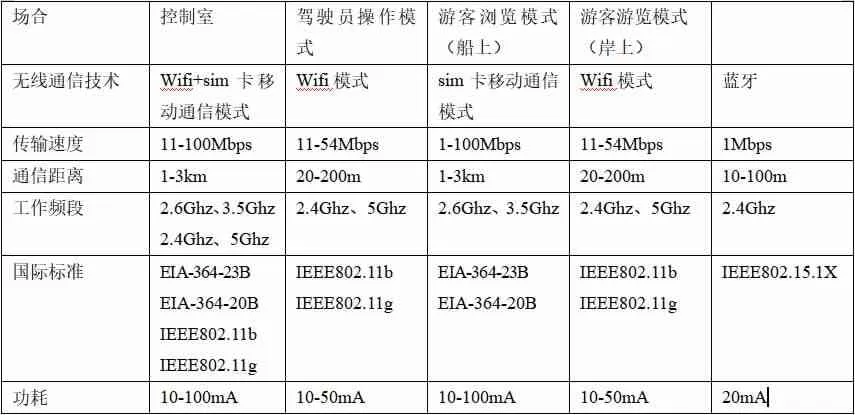
表1
根据上表可知, 蓝牙通信技术能够较远的距离实现电子设备传输数据、连接网络但传输的速度较慢,WIFI 数据传输速度较为稳定但覆盖的范围小而sim 卡覆盖范围大但是传输速度较为不稳定。因此本系统采用WIFI 和Sim 卡共同使用进行数据之间的传输
2.2 定位系统的分析和设计
2.2.1 GPS 卫星信号测试
测试1:室内
测试2:空旷场地
测试3:室外复杂地点
通过多次试验发现,室内环境接收不到卫星信号,室外有较强信号。
2.2.2 天线信号测试
天线是接收机前端最关键的部分, 只有保证它的可靠性才能充分体现到接收部分的性能。
2.2.3 GPS 功耗测试

表2
2.2.4 GPS 事后差分定位精度测试

表3
2.2.5 GPS 的误差分析:
当前,GPS 虽然在全世界的定位、导航等方面得到了广泛的应用,但是GPS 定位系统的精度受到的影响因素比较的多,比如天气因素、多径效应、当前可见GPS 卫星数量、卫星时钟误差等,只有对这些影响因素做了详细的分析才能将误差减小至尽可能地少,从而更好地设计GPS 接收和软件。由于游船是在水上航行,本身的环境对GPS 精确度的影响会比较的大,只能通过一些措施将GPS 定位的精确度尽可能地提高, 因此在天气比较恶劣的极端条件下就必须采用差分定位的方式以提高游船的GPS定位的精确度。
WiFi 定位的过程:WLAN 网络的AP 通过广播形式向四周发送Beacons 数据包,WLAN 中的终端设备在打开WIFI 功能的前提下通过扫描侦测到该AP,并对其SSID 进行鉴别和对比,发送请求连接经过认证并连接到该AP。服务器通过连接的网络信息以及其周边的其他网络信号的强弱就可以通过MAC 地址的坐标就可以计算出终端设备的具体位置。
而GPS 定位以及WiFi 定位都有着它的缺点比如GPS 定位的缺点即精确度比较的低, 而WIFI 定位的缺点也比较的明显,它需要有着发送数据的信号基站而且室外的信号强度会比较的弱能确定的位置范围也是比较的小。
所以根据这些定位系统的优缺点本文采用了INS 即惯性导航系统,其工作原理是建立在牛顿第二定律基础上的。而惯性导航系统则是用三个方向不同的加速度计对三个不同方位的加速度进行测量。参考惯性参考坐标系进行加速度方向的测定,而陀螺仪可以判断惯性参考坐标系相对于载体的旋转的角度,之后将加速度分解后进行积分。之后通过加速度对时间的连续数学积分就可计算得到物体的速度和位置的变化。在室外GPS 信号较弱时可以用惯性导航系统将轨迹进行规划从而使游船按照预定的轨迹行驶。
2.3 手机APP 的设计及使用
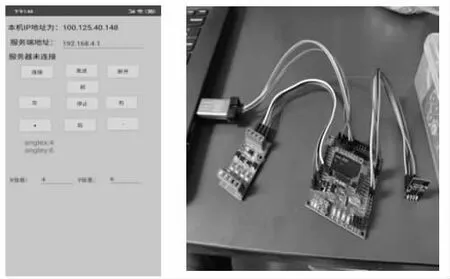
图2
本系统实现的Android 手机定位系统主要基于的是WIFI 模块实现的局域网内的控制, 手机端作为客户端与STM32 相连。手机端通过发送一串数字指令给STM32 来实现控制船的方向和位置信息传输等功能的实现。故APP 设计完成后还需测试其是否能和STM32 服务器端实现正常的通信。在使用时手机需先连接服务器建立的WIFI 信号,然后打开APP,点击网络连接按钮,与服务器建立连接。连接好服务器后,然后选择想要实现的功能, 再点击发送指令按钮, 将指令发送给服务器, 完成控制。APP 能实时显示STM32 采集的位置信息。系统能够通过APP远程的控制游船的移动方向又能进行手动的控制调整游船的位置。
3 结论
本系统还存在以下几点待改进或是可行的方向:a.测试过程中发现本系统在响应Android 控制的时候反应速度有点慢,主要问题可能是可能是需要进行两次通信,并且代码编的较为复杂,效率较低;b.只实现了局域网内的简易控制,没有实现远距离通信,有待改进。c.船的位置信息不能实时显示,这是一个改进的方向之一。
猜你喜欢
西江月(2021年3期)2021-12-21
云南画报(2021年6期)2021-07-28
网络安全和信息化(2020年9期)2020-12-31
网络安全和信息化(2020年7期)2020-08-07
杂文月刊(2019年24期)2020-01-01
杂文月刊(选刊版)(2019年12期)2019-09-10
网络安全和信息化(2019年8期)2019-08-28
水上消防(2019年3期)2019-08-20
广东第二课堂·初中(2019年8期)2019-08-13
杂文月刊(2018年21期)2019-01-05
