改进的图正则化非负矩阵分解的图像识别方法①
2020-10-29 05:05:48杨彩凤刘国庆
佳木斯大学学报(自然科学版) 2020年5期
杨彩凤,刘 涛,刘国庆,程 飞
(安徽工程大学计算机与信息学院,安徽 芜湖 241000)
0 引 言
图像识别是人工智能[1]重要研究领域之一,同时,图像识别也在机器视觉[2]和模式识别[3]中成为一个热点研究领域。面对大数据时,图像识别会面临“维数灾难”[4]的问题。然而,在识别过程中又需要快速精准地进行识别,找到两个或者两个以上的低维矩阵,使其乘积等于或者约等于原始矩阵,达到对原始矩阵降维的目的,是解决问题的一个主流方法,这就是矩阵分解技术。已有的心理和生理逻辑证明,在人脑中,对事物的认识是基于部分表示的[5],而且在图像数据中,像素点的值是大于等于零的。对此,提出了NMF算法来学习图像的局部特征,NMF的目标是找到两个非负矩阵,它们的乘积能有效地逼近原始矩阵。NMF的这些特征既符合人脑对事物的认识,又满足图像数据的表示要求,是学习物体部分表示的最佳方法。原始的NMF算法虽然能有效地对图片进行压缩降维,但仍有不足之处,比如存在冗余数据、忽略某些重要特征、过度降维等等。针对NMF在图像识别中存在的问题,提出了改进的NMF算法,结合图谱理论,保留数据的内在几何结构关系,设置阈值,优化基矩阵,过滤冗余信息,提高图像识别的效果。在PIE-Pose05,YaleB和COIL20数据库上的实验表明,本文提出的改进算法取得理想效果。
1 NMF算法
首次提出NMF 算法的是Lee和Seung等人[5],指出该算法可用于图像识别,并在同年发表的文章[6]中给出迭代公式的推导过程,基于两种目标函数,并且证明了收敛性。
有N张图像,将每张图像进行向量化表示,这里用字母M表示,那么图像数据库可以被表示为:一个M×N的矩阵X=[x1,x2,…,xN]∈RM×N,其中,X的每一列表示一个样本向量。进而,问题可以转化为:在实际中,需要找到两个非负数据矩阵U=[uik]∈RM×K和V=[vjk]∈RN×K,两者的乘积能很好地逼近原始矩阵X,即满足如下公式:
X≈U×VT
(1)
在一般的现实应用中K≪M,K≪N,所以,NMF对原始矩阵X进行了压缩。可以认为U包含一组基,该基对X中数据的线性逼近进行了优化,这里把U称基准图像矩阵,简称基矩阵,V称为编码矩阵,本文将对基矩阵U做相应处理,提高算法的效率。
2 改进的图正则化非负矩阵分解的图像识别算法设计
通过使用非负的约束,NMF可以学习基于部分的表示,然而,它没有发现数据空间固有的几何判别结构[7],而这对实际应用是至关重要的,将图谱理论[8-9]与NMF相结合,有效揭示隐藏的语义,又尊重数据内在的几何结构。并且,为了更好地提取图像特征,对基矩阵进行处理,使得处理过后的向量包含更多实际所需要的信息。
2.1 图谱理论
给定一组数据,可以构造一个有N个顶点的邻近图,每个顶点代表一个相应的数据点,其中,图中的每个数据点xj,找到它的p个最近邻居,并在xj和它的邻居之间设置一条边,权矩阵W存储每条边的权值,本文为了简洁,选择0-1加权法,当且仅当点j和点l由一条边连接时,Wjl=1,Wjl用于表示点xj和点xl的接近度。利用权矩阵W,可以用下面的公式来度量低维表示的光滑性:
Tr(VTDV)-Tr(VTWV)=Tr(VTLV)
(2)
其中,D是由矩阵W的列或者行构成的一个对角矩阵,Tr则是计算矩阵的迹,Djj=∑lWjl,L=D-W,称为图拉普拉斯[10]。
2.2 改进的图正则化非负矩阵分解的图像识别算法
将图谱理论技术与原始的NMF相结合,利用流形假设,开发图正则化非负矩阵分解(GNMF);在GNMF得到的基矩阵上添加阈值,过滤冗余信息,进而得到新的GNMF。
GNMF的欧式距离目标最小化函数如下:
O=‖X-UVT‖+λTr(VTLV)
(3)
其中,λ≥0,是正则化参数,控制新表示的平滑度。在GNMF的目标函数O在U和V中不是同时凸的,所以找到全局最小值是不现实的,但可以找到局部最小值。以下给出O的步骤,并且推导出最后的迭代公式。
O=‖X-UVT‖+λTr(VTLV)=
Tr((X-UVT)(X-UVT)T)+λTr(VTLV)=
Tr(XXT)-2Tr(XVUT)+Tr(UVTVUT)+
λTr(VTLV)
(4)
利用拉格朗日乘子ψik和φjk分别约束uik≥0和vjk≥0,并且Ψ=[ψik],Φ=[φjk],拉格朗日Γ是:
Γ=Tr(XXT)-2Tr(XVUT)+Tr(UVTVUT)+
λTr(VTLV)+Tr(ΨUT)+Tr(ΦVT)
(5)
Γ对U和V求偏导得:
(6)
(7)
运用KKT条件ψikuik=0和φjkvjk=0,得到uik和vjk的方程:
-(XV)ikuik+(UVTV)ikuik=0
(8)
-(XTU)jkvjk+(VUTU)jkvjk+λ(LV)jkvjk=0
(9)
解得方程的跟新规则为:
(10)
(11)
对基矩阵U进行优化,过滤数据之间存在的冗余信息。选择一个阈值S,对矩阵U进行阈值判断处理,具体过程为,对于基矩阵U的每一列,将其与阈值S进行比较,小于阈值S的置为s,s一般为一个很小的数,并且s大于0,得到新的基矩阵Unew,X在新的基矩阵Unew投影得到新的Vnew,从而得到优化的迭代跟新规则,对于公式(10)和(11)有:
(12)
(13)
经过优化的GNMF算法,降低冗余数据的干扰,使分解后的结果中含有更多在图像识别过程中所需的有用信息,能够有效提高算法的效率。
3 实验分析
3.1 实验数据库
为了验证本文提出的将NMF结合图谱理论和对基矩阵优化的有效性,利用MATLAB平台进行实验验证,同时选用公开的两种人脸图像数据库和一种物体图像数据库:PIE-Pose05,YaleB和COIL20图像数据库。表1展示了三种图像数据库的详细信息。
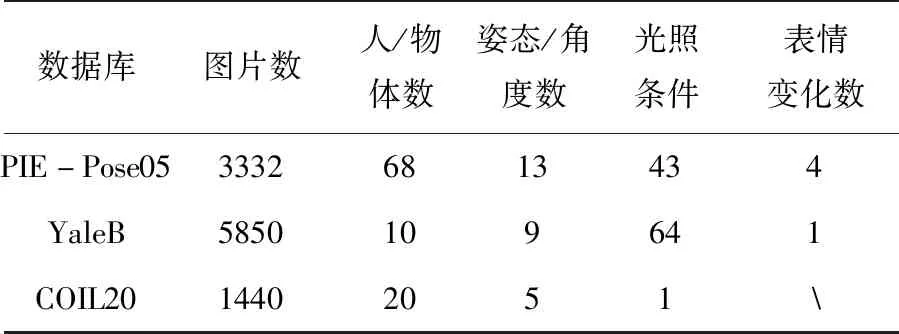
表1 三种图像数据库详情
3.2 不同算法比较
用不同算法的对比实验,验证本文提出算法在图像识别中的有效性,这里选用了Kmeans,PCA,NMF,GNMF,同时为了表明本文提出的对基矩阵优化的有效性,给出两种优化处理的实验:第一种,针对NMF,在原始NMF之上运用本文提出的优化方法,简称New-NMF。第二种,针对GNMF,在GNMF之上运用本文提出的优化方法,简称New-GNMF。
不同参数设置为:GNMF中,p设置为5,正则化参数λ设置为100;New-NMF中,在PIE-Pose05,YaleB两种人脸图像数据库上,基矩阵阈值S设置为0.7,s设置为0.00001;在COIL20物体图像数据库上,基矩阵阈值S设置为0.03,s设置为0.00001;New-GNMF中,p设置为5,正则化参数λ设置为100,PIE、YaleB上基矩阵阈值S设置为0.7,s设置为0.00001;COIL20上基矩阵阈值S设置为0.03,s设置为0.00001。
3.3 实验结果
为了直观地表示出本文提出的算法在实际应用中的有效性,使用两种常用的标准度量方法:正确率(AC)和归一化互信息(NMI)。表2~7展示了实验结果,为了随机化实验,对每个给定的集群号K分别测试运行10次,表中报告了不同方法的每个集群号的性能结果(取平均值,并且保留两位小数)。

表2 PIE-Pose05上的AC结果(%)

表3 PIE-Pose05上的NMI结果(%)

表4 YaleB上的AC结果(%)

表5 YaleB上的NMI结果(%)

表6 COIL20上的AC结果(%)

表7 COIL20上的NMI结果(%)
从以上实验结果可以看出,本文提出的改进算法对于图像识别是有效的,可以总结为以下几点:
1)经过对基矩阵进行阈值限制优化处理后,滤除图像识别中数据之间的冗余信息,降低冗余信息的干扰,达到了有效特征提取目的,在不同的图像数据库中,本文算法比Kmeans,PCA,NMF,原始GNMF的效果好,AC和NMI两个指标都有所提高;
2)在NMF的基础上引入图谱理论有效地描述了图像的几何判别结构,提高识别效果,在三个数据库中,不管是AC还是NMI,GNMF比NMF效果好,New-GNMF比New-NMF效果好;
3)在矩阵分解技术的基础上,通过本文提出的对分解后的基矩阵设置阈值限制,进行优化处理,不管是对NMF还是GNMF,都能提高算法的有效性,并且在PIE-Pose05,YaleB人脸图像数据库上,NMF效果更加明显,在COIL20物体图像数据库上,GNMF效果更加明显。可见,对在NMF和GNMF的基础上对基矩阵进行优化处理能达到理想的效果;
4)由于不同数据库中的图片的拍摄条件、图片数量等有所不同,在三个数据库上的效果有所不同,表现为,YaleB和COIL20数据库上的提高结果比PIE-Pose05数据库上的提高结果更加出色;
5)对于每个给定的集群号K(1,3,5,10,20,23),实验结果也存在差异,但差异不是很大,算法整体表现稳定。
3.4 参数选择
本文提出的优化算法关键是对基矩阵添加阈值S,在图像识别过程中过滤冗余信息,S具有控制优化程度的功能。本小节以曲线图的形式展示出在三个数据库上AC和NMI随阈值的变化而变化的结果,这里在集群号23上分别对NMF和GNMF两个方法进行实验,并将s设置为0.00001。横坐标表示阈值S的取值范围,纵坐标表示三个数据库上AC和NMI随S的变化而变化的结果,如下各图所示:

图1 AC和NMI在PIE-Pose05上随参数S变化而变化

图2 AC和NMI在YaleB上随参数S变化而变化

图3 AC和NMI在COIL20上随参数S变化而变化
从图1,2和图3可以得到以下结论:
1)对于NMF,在数据库PIE-Pose05上,当S在0.7和1.1之间,AC和NMI都有比较好的效果;
2)对于NMF,在数据库YaleB上,当S在0.5到1.1之间,AC和NMI都有比较好的效果;
3)对于NMF,在数据库COIL20上,当S在0.01到0.06之间,AC和NMI都有比较好的效果;
4)对于GNMF,在数据库PIE-Pose05和YaleB上,当S在0.3到0.9之间,AC和NMI都有比较好的效果;
5)对于GNMF,在数据库COIL20上,当S在0.01到0.04之间,AC和NMI都有比较好的效果。
4 结 语
提出了一种新的图正则化非负矩阵分解算法,将图谱理论与传统的NMF相结合,利用流形假设,构建邻近图,搭建模型,保留数据的内在几何结构;对分解后的基矩阵设置阈值S,进行优化处理,过滤了数据中的冗余信息,并且将这种方法运用到图像识别中。实验结果表明,不管是NMF还是GNMF,本文提出的改进方法,在图像数据库中都具有更强的识别能力。
但此方法也存在不足,第一,阈值处理对不同数据达不到针对性优化,在PIE-Pose05数据库上的表现不是很出色;第二,因为增加了阈值处理,使得整个识别过程所需时间增加。在未来的工作中,将对这两点不足进行改进:对于阈值S如何针对性自动取值以及如何降低识别速度做进一步地研究。
猜你喜欢
少先队活动(2021年4期)2021-07-23 01:46:22
电子制作(2019年16期)2019-09-27 09:34:50
制造技术与机床(2019年9期)2019-09-10 07:36:54
中国交通信息化(2019年4期)2019-07-13 05:51:34
西南交通大学学报(2018年6期)2018-12-18 02:22:28
电子制作(2018年19期)2018-11-14 02:37:04
电子制作(2018年14期)2018-08-21 01:38:16
河北遥感(2017年2期)2017-08-07 14:49:00
衡阳师范学院学报(2016年3期)2016-07-10 07:16:27
沈阳医学院学报(2015年1期)2015-12-27 13:44:40