3-SPS/PS并联机构运动仿真
2020-10-27 11:38周毅钧陈业富
洛阳理工学院学报(自然科学版) 2020年3期
傅 敏,周毅钧,陈业富,张 伟
(安徽理工大学 机械工程学院,安徽 淮南 232001)
近年来,并联机构发展很快,出现的机构构型有很多种,并联机构不同于串联机构,串联机构是一条顺序串联结构,由两个平台和不少于两条串联支链组合而成的闭环机构称为并联机构[1-5]。与串联机构相比而言,并联机构由于受到较多的约束,所以机构的工作空间较小,但是并联机构有结构简单紧凑、运动平稳、运动响应性好、承载能力大和刚度高等优点。并联机构从传统的6个自由度到少自由度,该类型的并联机构可以将原本的机械机构得到相应的简化,都发挥着各自的特色,少自由度并联机构以三自由度、四自由度、五自由度3种为主,广泛应用到微型操作手、机床、液压支架等方面。
本文以3-SPS/PS并联机构为研究对象,通过拓扑结构对并联机构的方位特征集(POC集)以及机构的自由度数目(DOF)[6-9]进行求解。通过SolidWorks软件建立3-SPS/PS并联机构的三维模型,计算求解了并联机构的位置表达式,并且利用仿真软件Adams对并联机构进行运动仿真[10-11],得到了并联机构的运动曲线。
1 3-SPS/PS并联机构自由度分析
3-SPS/PS并联机构的结构简图如图1所示,并联机构是由上平台0、下平台1以及4条支链组合而成的。并联机构的三条SPS支链连接方式相同,分别是由球面副S11、S21、S31与下平台连接,中间通过移动副P12、P22、S32连接,与上平台通过球面副S13、S23、S33相连接,三条SPS支链的拓扑结构可表示为:SOCi{-Si1-Pi2-Si3-}](i=1,2,3);机构的PS支链由移动副P42、球面副S43连接上下两平台,拓扑结构表示为:SOC{-P42-S43-}]。
选取动平台上与顶点以及平台中心点都重合的为基点。
确定支路末端构件的POC集:
确定一、二条支路所组成的第一个独立回路位移方程数ξL1,如公式(1)。
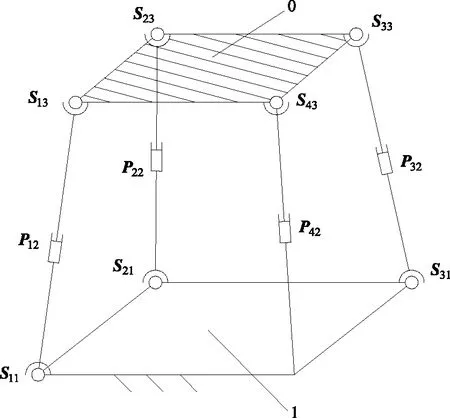
图1 3-SPS/PS并联机构结构简图

(1)
确定第一、二条支路组成的子并联机构的DOF和POC集,如公式(2)和公式(3)。
(2)
(3)
同样的方法计算其它支链构成的子并联机构,最后可以得出3-SPS/PS并联机构的自由度以及方位特征集,如公式(4)和公式(5)所示。
(4)
(5)
因此,该并联机构具有三转动一平移的运动形式,共4个自由度。
2 3-SPS/PS并联机构的位置反解
位置反解是根据并联机构的结构尺寸参数以及动平台的位置姿态,求解并联机构每条驱动杆的位移量,所以该机构就是求解四个移动副的驱动位移l1、l2、l3、l4。设上下两平台分别是边长为l、L的正方形,在平台上建立如图2所示的坐标系,上平台建立坐标系P-UVW,用{PB}]表示动坐标系,下平台建立坐标系O-XYZ,用{OA}]表示静坐标系。
根据图2所示,Ai点在定坐标系中的坐标为:
根据图2所示,Bi点在动坐标系中的坐标为:

利用齐次坐标进行坐标的变换,将并联机构动平台上的点Bi(i=1,2,3,4)在{PB}]的位置矢量转化到定平台静坐标系{OA}]中的,如公式(6)所示。
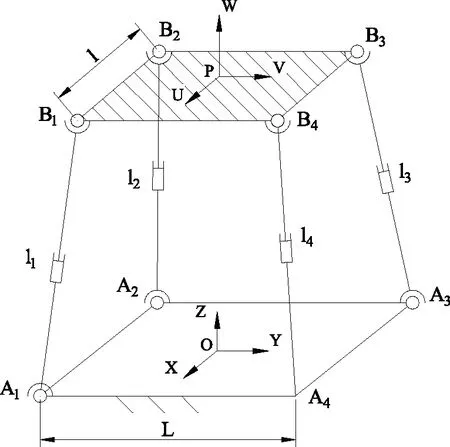
图2 3-SPS/PS并联机构坐标系图

(6)
(7)
并联机构的反解表达式可以通过公式(8)得出,即求得每条支链杆的驱动位移矢量li(i=1,2,3,4)。
(8)
将各点的坐标代入公式(8)中,得出反解表达公式(9)。
(9)
3 3-SPS/PS并联机构的运动仿真
为了更加直观地了解机构的运动特性,利用Adams软件进行运动仿真,它可以用来描述机构的在一定的输入条件状态下的能够输出的运动状态。通过SolidWorks建立3-SPS/PS并联机构的三维模型,并另存为Parasolid(*.x_t)格式,导入到Adams软件中。对机构的材料属性进行设置,然后对机构建立所需的约束,在Adams中连接选择固定副、移动副、球副等,然后添加所需要的驱动函数,最后可以进行仿真,添加后在Adams中的模型,如图3所示。
3.1 正解仿真
由于并联机构的正解计算较复杂,通过仿真的形式来求解很方便,3-SPS/PS并联机构是通过四个移动副所驱动的,分别添加驱动函数:20×sin(0.5×time)。仿真类型选择默认,时间为20 s,步数为500步,进行运动仿真。运行结束后进入后处理,选择动平台为研究对象,选择绘制出动平台在空间X、Y、Z三个坐标轴方向上的,速度曲线图像,如图4所示。
从图4可以看出,3-SPS/PS并联机构的几条运动曲线都是周期性的有规律的变化。其中位移曲线平稳,机构在运动的过程中运动是稳定的,只在Z方向有变化。速度、加速度曲线在X、Y方向运动平稳,都只在在Z方向变化波动较大。

图3 3-SPS/PS并联机构Adams模型
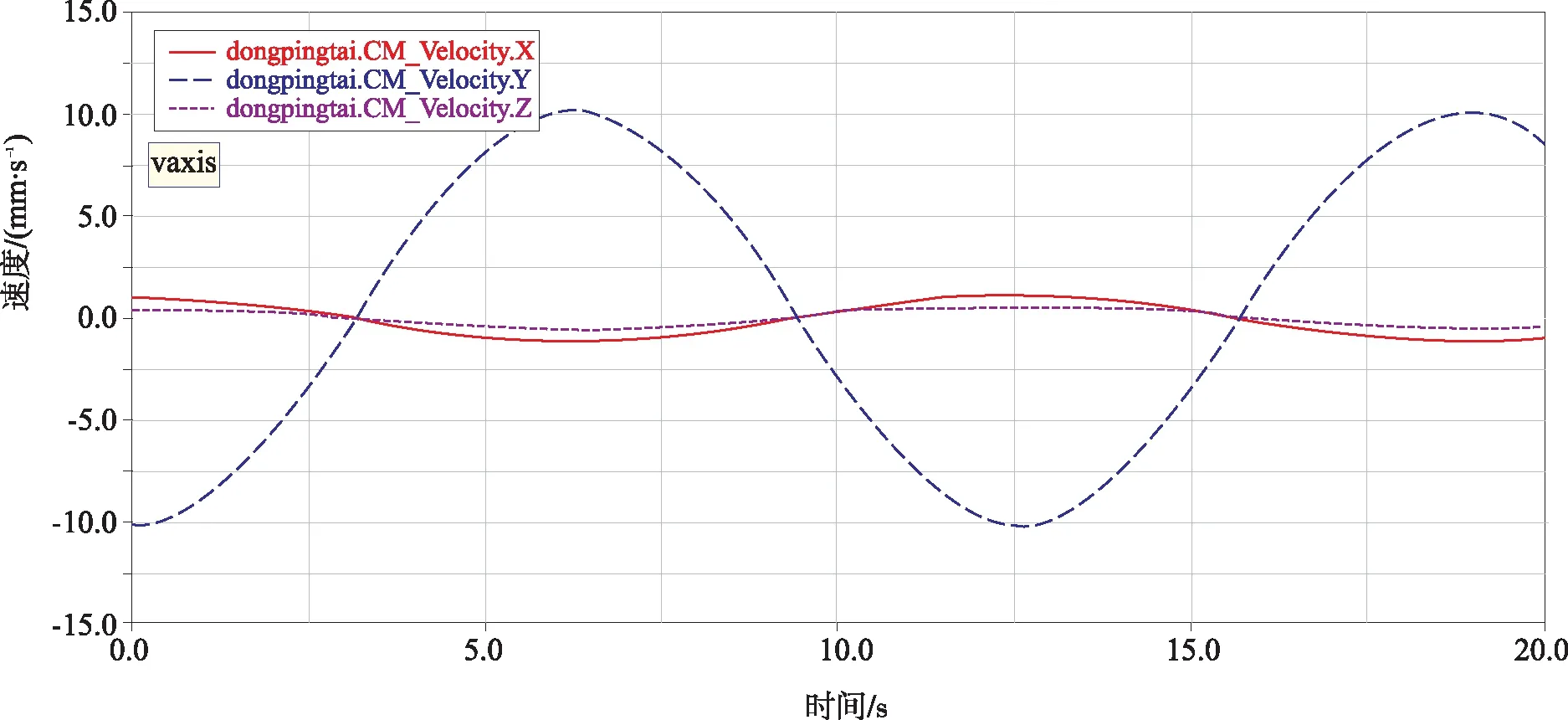
图4 动平台速度曲线图
3.2 反解仿真
3-SPS/PS并联机构具有4个自由度,所以在驱动中设置3个转动函数和1个移动函数,选择动平台上的中心点为驱动点,4个驱动函数分别如公式(10)所示。
(10)
运行结束后,在后处理中绘制出X、Y、Z三个坐标轴方向上的速度曲线图,如图5所示。从图5可以看出,只有加速度曲线在开始有一个微小的变化,速度的运动图像都是周期性的变化,没有发生明显的突变,在Y方向波动较小,在X、Z方向变化波动较大。
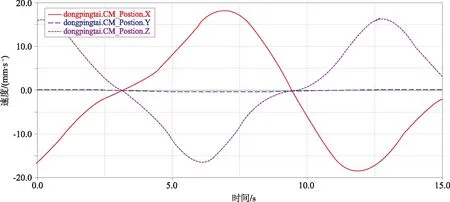
图5 反解速度曲线图
4 结 语
(1)本文以3-SPS/PS并联机构为对象,求解了机构的方位特征集、自由度。
(2)结合3-SPS/PS并联机构的运动特征,计算了机构的位置反解表达式。
(3)通过Adams软件对3-SPS/PS并联机构进行了运动仿真,并得到了并联机构的运动曲线图像,验证了机构的运动学性能良好,为机构实际应用奠定了理论基础。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
新世纪智能(英语备考)(2018年11期)2018-12-29
中国环境监察(2016年7期)2016-10-23
中国现当代社会文化访谈录(2016年0期)2016-09-26
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
探测与控制学报(2015年4期)2015-12-15
北京航空航天大学学报(2014年1期)2014-12-19
中国机械工程(2012年15期)2012-07-25
中国机械工程(2010年9期)2010-06-04