
浅谈汽车内喷机器人漆雾污染防控措施
2020-10-21 04:14张哲
汽车实用技术 2020年12期
张哲


摘 要:介绍了汽车内喷机器人的常见的种类,选型和内腔喷涂机器人的重要組成部分,并针对汽车内腔喷涂机器人的关键部件在汽车喷涂过程中常见的污染问题的防控方法。
关键词:汽车喷涂;内喷机器人类型;内喷机器人组成;机器人污染
Abstract: Introduce the types of the internal spraying robot and how to select the suitable robot according to the specific situation and prevent the robot pollution during painting.
Keywords: Lnternal spraying robot; Automobile spraying; Robot pollution
引言
随着智能技术的发展及企业对员工作业环境的重视度提升,近几年来很多汽车主机厂开始引进内喷机器人取代人工完成车身内表面的喷涂工作,在降低工人劳动强度的同时,提升产品质量和生产效率。内喷机器人主要分为两类,一类是随行式内喷机器人,如江淮汽车、吉利汽车、长安福特、宝马汽车等均采用这种模式,另一类是走停式内喷机器人,主要应用车企如上汽通用,北京奔驰、大众汽车等。内喷机器人与人工喷涂相比具有如下显著优点:
(1)可大幅提升汽车车身涂装效率,且涂料的上漆率相对人工喷涂会有所提升;
(2)内喷机器人喷涂质量及稳定性更好;
(3)采用内喷机器人时,喷房室体送排风可采用循环风,且风速相对人工喷涂低30%~50%,可降低喷房的能源消耗。
内喷机器人所具有的优势决定各大汽车企业会越来越多的使用内喷机器人来取代人工喷涂,但在内喷机器人应用过程最容易出现开门挂钩及轨道箱被漆雾污染,导致涂装车身出现颗粒、杂色等质量问题,增加小修或大返修工作量,降低生产效率等问题,因此本文就内喷机器人系统类型、主要组成及关键部件的污染防控问题进行探讨。
1 内喷机器人系统介绍
1.1 内喷机器人类型
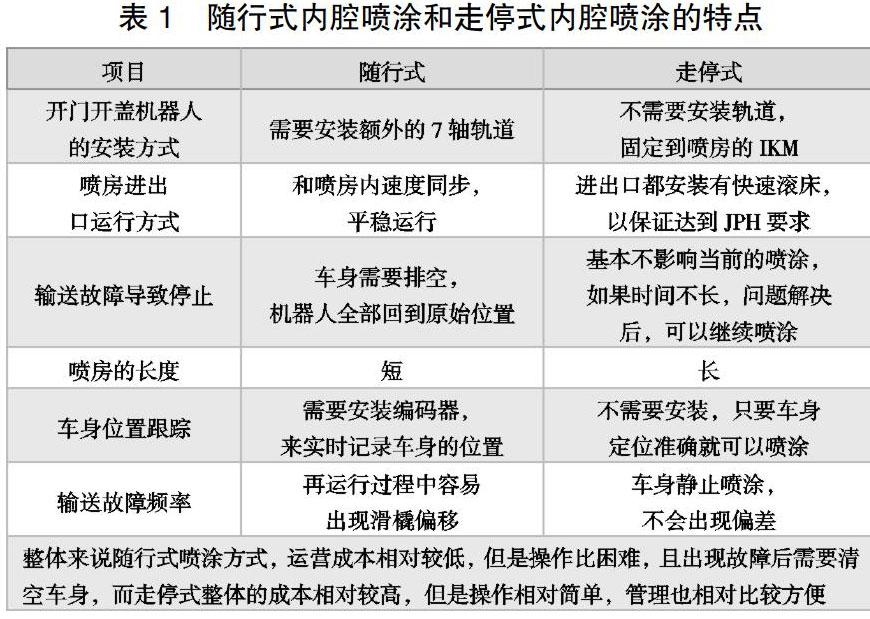
内板的喷涂一般分为有2种方式:一种是随行式,顾名思义就是车身在喷房内是按照一定的速度运动,机器人也根据车身的运动和仿形轨迹沿着轨道运动,从而完成喷涂作业。另一种是走停式,就是车身在内喷站入口快速进入喷房,通过减速和停止开关,准确到达预定的喷涂位置,并用夹子或者定位销把车固定到指定位置,然后机器人再进行喷涂作业。
1.2 内腔喷涂机器人选型
内喷机器人系统选型需要结合车身的喷涂面积,投资成本,生产线每小时设计生产汽车的(JPH)以及输送的传输速度、整车喷涂工艺、质量标准要求等因素,进行全面分析,才能做出最优化的方案。
运输方式的选择;运输方式一般要考虑到整体的投资成本,场地的大小以及后期操作维护的情况进行选择,因为走停式喷涂需要的喷房长度较长,成本相对较高,但是操作相对简单,管理比较简单,而跟踪式对于喷房的长度要求较小,单是成本较低。所以汽车厂要结合自身因素,综合考量。
机器人类型的选择:内喷机器人有低位机器人和高位机器人2种,采用高位式机器人对于喷房的宽度要求相对较低,而采用低位机器人则操作方便,而且轨道采用全包裹式安装,维护成本低。现在大多数汽车主机厂采用高位和低位配合的方式,再成本预算和维护保养找到一个最佳的结合点。
机器人数量确定;首先要根据最确定最大车身的尺寸和喷涂面积,为了保证良好的喷涂效果,机器人的喷涂速度组好小于800m/s,而流量不要大于450ml/min,再结合喷房选型的尺寸,确定最终的机器人的数量。
2 内喷机器人的组成
汽车内腔喷涂的机器人选择有许多种,不同的汽车厂可以根据自身的情况进行选择,常见的结构有C轨机器人(低位带7轴附加轴)配套开门开盖机器人;C轨和E轨机器人(高位带7轴附加轴)加上配套开门开盖机器人,由于C轨和E轨的喷涂机器人都有带附加的7轴移动轨道,所以配套的设备就会比较多,维护和保养的工作就会比较多一些。
2.1 内喷机器人轨道
内喷轨道机器人,顾名思义就是附带7轴轨道的机器人,常见的轨到有C轨和E轨。对于C轨是相对于低处的轨道,而E轨则是相对高处的轨道。机器人轨道组成部分大致有轨道支撑框架,坦克链,直线导轨和齿条,驱动单元等等。
2.1.1 坦克链简介
坦克链里面安装的主要是机器人运动需要的一些动力电缆和通讯电缆,还有针对机器人工艺部分还会有一些输送油漆的管路以及空气管路。坦克链的一端会和机器人固定,在喷涂过程中会和机器人共同移动,而另一端会和轨道的框架进行固定,保证机器人在运行过程中,机器的人油漆管路,空气管路以及电缆保持相对位置不变。从而使机器人整个运行相对平稳。
2.1.2 直线导轨和齿轮
直线导轨和齿轮是机器人在轨道上运行的主要部件,对于E轨有上下2根直线导轨和位于两根直线导轨中间的1根齿条组成。直线导轨上会有4个可移动的滑块,然后通过螺栓和机器人固定到一起,4个滑块再通过内部的滚珠使机器人在直线导轨上按照指定的方向平稳的运行。而中间的齿条则是和机器人的7轴电机相啮合,通过电机的转动来给机器人提供动力。
2.1.3 驱动单元
驱动单元,C轨轨道的驱动装置是嵌装在移动的滑架外壳中。驱动装置由一个锥形齿轮相连的伺服电机组成,在驱动装置上还有一个螺旋毛毡与齿轮卡合,毛毡自动浸染油脂并为驱动齿轮和齿杆提供润滑。锥形齿轮的空心轴通过一个锁紧套件装入一个主动轮轴,然后主动轴通过和齿条卡合来驱动机器人运动。
2.2 润滑装置
每根轨道都配有单独的润滑装置,润滑装置的驱动部分大致分为气动泵和电动泵两种。对于整根轨道的润滑系统, 每个油泵会安装润滑油管到每一根直线导轨的分配块,再从份配块安装油管到每一个需要润滑的模块。每个油单独泵配有一个油箱,在油箱上设有低位报警开关,当润滑油箱中的液位到达低位后,在操作台的电脑显示屏上会提示我们加油泵的油箱液位低,需要添加润滑油,待重新给油箱加注润滑油后,报警就会消失,从而能够保证轨道的通畅无阻的运行。
2.3 轨道箱
轨道箱顾名思义就是为机器人的每根轨道做一個箱体,把整个轨到包裹起来,可以让内喷站整体看起来很和谐,美观,不会有整根轨道裸露到外面的那种突兀感。当然轨道箱另一个重要作用就是对轨道起到保护。内喷机器人在完成喷涂工作的过程中,如果整根轨道都暴露在空气中,则会被过喷的漆雾飘落到轨道表面,从而把直线导轨和齿条污染。所以每根轨道会安装一个轨道箱,并在轨道箱内部会安装通风系统,保证整个轨道箱处于正压的状态,这样在漆雾飘过来的时候,会被轨道箱中的压缩空气形成一种保护屏障,从而减少对轨道的污染。
内腔喷涂机器人在工作效率和稳定性上,对汽车的喷涂行业有着重要的作用,机器人可以持续长时间按照设定好的轨迹进行喷涂,不会因为疲劳而产生动作的偏差,当然在上漆率上也会有所提高,对于喷房室体的沉降风可以用循坏风代替新鲜风。当然机器代替工人来进行工作,也会有它自己相应的一些不足,一般情况下内喷机器人相对外腔喷涂机器人的种类和数量会比较多,且喷涂轨迹和动作相对复杂,运行的速度也相对较快,这就会导致整个内喷站的漆雾就会相对比较集中,这样长此以往就会对设备产生污染和损坏,而且漆雾在设备上聚集过多,就会滴落到车身外表,从而产生质量问题,下面我就此问题简单的讲解一下机器人内喷腔喷涂常见的问题和处理方法。
3 开门挂钩的污染防控措施
对于内腔的喷涂,喷涂机器人会和开门机器人进行配合来完成机器人车门内腔的喷涂工作,这就不可避免会造成过喷的油漆有一部分会掉落到开门机器人的钩子上面,机器人重复的进行同样的喷涂工作,长此以往就会导致开门钩子的积漆,如果不及时进行清理的话,积漆就有可能低落到车身表面,从而影响到整车的车身质量。当然对于开门机器人的开门钩子的污染问题是无法避免的,那我们应该从哪些方面尽可能的来降低油漆对于开门钩子的污染呢,下面是我从自己的工作经历来讲解几点。
3.1 优化喷涂机器人的仿形和喷涂参数
机器人钩子的污染主要是过喷漆雾附着到钩子表面,所以在车门内腔喷涂过程中,优化喷涂机器人的喷涂角度,尽量让机器人在喷涂过程中不会出现雾化器正对机器人开门钩子喷涂的情况,在开门钩子和喷涂区域重叠的位置,通过调整角度,让雾化的油漆尽可能少的掉落到钩子的表面,这样可以很好降低钩子清洁的频率。
3.2 调整开门机器人的钩子位置
为了降低过喷的油漆积聚到钩子表面,适当的调整钩子的位置,同样可以达到相同的效果,在喷涂过程中尽量的调整开门钩子的位置,使其处于整个喷涂过程忠雾化的范围少的位置。通过调整喷涂机器人雾化器的角度和钩子位置,达到降低钩子污染最佳结合点。
3.3 调整喷房室体的沉降风
在车身的整个喷涂过程中,喷房室体的动静压室会有沉降风从上往下吹下来,一般内腔机器人喷涂的风速为0.35m/s -0.45m/s。而且要保证整个室体内的风平衡是满足要求的,这样才能确保在整个喷涂过程中,过喷的油漆能够被下沉风平稳的压到文丘里。如果整个室体的风平衡不稳定,就会导致喷房的漆雾方向的混乱,甚至会产生旋流,这同样也会使漆雾散落到开门钩子。为了保证喷房内风平衡,会在喷房的顶部安装过滤棉,对沉降风起到过滤和均流的作用,建议每3个月对室体内的风平衡和风速进行检查,如果发现没有满足设计要求,就要更换室体顶部的过滤棉,然后重新检测,以保证室体的沉降风满足正常的工艺要求。
3.4 车身的工装夹具
机器人在喷涂过程中,开门钩子会在完成车门的开启动作后,喷涂机器人再按照设计好的程序进行喷涂工作,这喷涂程序的都是按照标准的工装以及安装方式进行喷涂,如果车门的工装夹具发生了变化,则会导致开门的角度以及位置发生变化,这样也会影响机器人正常的喷涂程序,从而导致开门钩子污染加剧的情况出现,所以要定期对车身的工装夹具进行校监,对于不符合要求的及时进行替换。
4 机器人7轴轨道污染防控措施
采用内喷带附加7轴轨道的机器人,在喷涂过程中机器人过喷的油漆会不可避免的对7轴轨道产生污染,长此以往可能会引起7轴轨道滑块(如图三中3和5)运行不通畅,如果里面的滚珠因为污染物卡死,则需要首先拆除一段直线导轨(图三2和4),把损坏的滑块滑动到拆除的直线导轨的位置取下来,再更换新的滑块,这样不仅需要新的备件支持,也会耽误宝贵的时间,产生不必要的损失,所以对轨道的保养就变的非常重要。
4.1 定期对机器人的轨道进行保养
由于机器人在喷涂过程中不可避免的会对7轴直线导轨以及齿条产生污染,所以定期保养一定是第一位的,要安排清洁工定期对轨道表面的油漆进行清洁。
4.2 调整机器人仿形程序
在内腔喷涂过程中,开门和喷涂要配合完成喷涂工作,为了节省能耗,室体的设计也是不断缩小,所以机器人喷涂仿形的可操作空间不大,但是我们可以尽可能的调整雾化器的喷涂角度,使其尽量减少雾化器正对7轴轨道喷涂的仿形出现,这样也可以减轻轨道保养的频率。
4.3 轨道的润滑系统要定期检查
机器人每根轨道运行的直线的导轨,齿条,滑块都配有单独的润滑管路,要定期检查轨道的润滑油箱是否液位正常,如图七所示,当油箱液位低时,就会触发油箱的液位传感器(如下图1和2)报警,这就需要员工在规定的注油口(如下图中的4),往油箱加注润滑油。因为润滑油箱会在机器人的喷涂过程中通过润滑管路对各个运动部件进行润滑,从而保证直线导轨,齿条和滑块之间运行的平滑,大大提升设备的使用寿命。
4.4 轨道箱体的通风
机器人每根轨道会配套安装一个轨道箱,整个轨道箱是一个密闭空间,在轨道箱内部会有送风管直接接入到轨道箱室体,给轨到箱进行通风,通风量的大小是根据轨道箱的尺寸设计的,这样就可以使轨道箱的室体形成一个正压的空间,当外部的漆雾飘过来的时候,会被轨道箱室体内部的正压气体吹开,从而尽可能的保证轨道箱内部以及轨道不受漆雾的污染。所以在进行喷涂工作之前一定要检查轨道箱室体的通风是否已经打开,保证会每米E轨轨道箱的通风量不低于350m?/h,每米C轨轨道箱的通风量不低于150m?/h,并且在整个喷涂过程中轨道箱室体的所有的门必须是关闭的,以保证轨道箱的密封性不被破坏。还要定期对轨道箱室体通风的风量进行检测,保证每个室体的通风量达到了当初的设计要求,这样才可以及减少漆雾对轨道的污染,减少额外的设备保养频次和不必要的备件损失。
5 结语
内腔喷涂机器人对于汽车喷涂行业的重要性是不言而喻的,随着科技的不断发展,汽车生产自动化程度的不断提高,以及国家对于环保重视程度的提高,在未来的汽车喷涂行业中,它必将担任越来越重要的角色。新技术的发展和引进过程中的改进,推广是每一个行业不断发展的永恒主题,随着汽车制造行业的持续高效的发展,以及新能源汽车的崛起,汽车内腔喷涂机器人也必将会不断创新,并日趋成熟,未来也会有越来越多的企业将接受并采纳这种自动化喷涂技术,而作为一名新时代的汽车涂装人,定会勇闯先锋,不负众望。
