
车辆盲区监测系统测试评价方法研究
2020-10-21 04:14何佳李长娟郭蓬林强唐风敏
汽车实用技术 2020年12期
关键词:评价体系
何佳 李长娟 郭蓬 林强 唐风敏

摘 要:随着汽车车载ADAS系统越来越普及,如何有效评价ADAS系统的性能和确定使用条件边界条件成为重点。车辆盲区监测系统作为重要的辅助驾驶员安全预警系统,针对如何有效评价一套车辆盲区监测系统、以及使用何种指标、关键参数进行评价,提出使用虚拟仿真测试与实车测试相结合的办法,并提出百公里误报率、漏报率评价指标和不同驾驶员驾驶体验评价体系,综合评价盲区监测系统的性能,从而为改进盲区监测系统提供指导。
关键词:盲区监测系统;评价体系;关键参数
Abstract: With the increasing popularity of ADAS system, how to effectively evaluate the performance of ADAS system and determine the boundary conditions of service conditions become the focus. As an important assistant driver safety early warning system, the vehicle blind area monitoring system proposes the method of combining virtual simulation test with real vehicle test for how to effectively evaluate a set of vehicle blind area monitoring system, which indicators and key parameters to use, and proposes the evaluation indicators of 100 km false alarm rate, missing alarm rate and different driver driving experience evaluation systems, Comprehensive evaluation of the performance of the blind area monitoring system, so as to provide guidance for improving the blind area monitoring system.
Keywords: Blind area monitoring system; Evaluation system; Key parameters
1 盲區监测系统法规
2019年7月29日,工信部对3项汽车行业推荐性国家标准进行公示,包括先进辅助驾驶系统ADAS、道路车辆盲区监测BSD和乘用车车道保持辅助LKA,《道路车辆盲区监视系统(BSD)性能要求及试验方法》中规定汽车盲区监测(BSD)系统的一般要求、性能要求和试验方法[1-3]。在进行实车测试时,目标车辆和试验车辆相互关系如图1、2所示,图1中车辆编号1为试验汽车,标号2为目标车辆,标号3为试验车辆1车身最外缘(近目标车辆侧,不包括外后视镜)与目标车辆车身最外缘(近试验车辆侧,不包括外后视镜)之间的横向距离。
图2中标号3为试验车辆前部位于第九十五百分位眼椭圆的中心与目标车辆最前端之间的纵向距离。
2 盲区监测系统测试系统搭建
盲区监测系统测试分为虚拟仿真测试与实车测试,虚拟仿真测试在盲区驾监测开发早期的设计、开发和评估阶段,通过建立一套逼近实际驾驶场景的仿真环境,能够有效降低开发验证时间和把控风险,盲区监测系统开发流程如图3所示,分为搭建虚拟仿真场景、搭建实车场景、配置参数、控制策略验证、数据分析、问题分析、修改控制策略和参数等阶段[4-5]。
搭建虚拟仿真场景常用到Prescan仿真引擎,Prescan仿真引擎提供各种模型以实现环境模型的搭建,提供的模型包括车道、车辆、行人轨迹及位置等。在搭建虚拟仿真场景时,按照实车传感器安装参数设置虚拟场景中角毫米波雷达传感器的安装参数,根据实车测试需求进行高逼真的仿真场景渲染。Prescan仿真引擎与Matlab/SIMULINK完美耦合,可通过Simulink平台完成ADAS控制策略开发,仿真架构如图3所示。最后通过prescan和matlab/SIMULINK的耦合仿真来完成数据可视化,仿真数据可视化,驾驶环境可视化等操作。
为实现车辆盲区监测系统全方位测试,测试需考虑道路交通状况、道路类型以及天气等因素对系统性能的影响。如图5所示,在生成测试环境时,从天气种类、道路类型、道路交通情况中随机选取一种,排列组合成一种典型的盲区监测系统测试场景[6]。
对测试车辆盲区监测系统性能进行测试时,需要对测试车辆的行驶轨迹、行驶速度、驶行加速度以及在某一时间段的驾驶行为进行规定和设置,同时,需要确定目标车辆(驶入盲区的车辆)数量,目标车辆的行驶轨迹、速度、加速度以及在某一时间单元上的行驶行为进行规定和设置。
3 测试数据保存与分析
为实现对盲区监测系统的快速验证和试验结果分析,开发如图5所示的车辆盲区监测系统测试软件,软件能够实时的记录车辆的周围环境视频信息,以及角毫米波雷达数据信息和车辆重要参数信息,同时实现对不同频率的数据源进行时间同步,在数据分析时可对采集的数据进行回放,以便分析观察试验结果。同时,为保证虚拟仿真测试能够使用如图5所示的数据采集与分析软件的功能,开发Matlab/simulink与数据采集与分析软件数据交互API接口,将虚拟仿真引擎的毫米波雷达数据和车辆参数输送给分析软件,以便快速的进行仿真分析。
测试车辆需要在车辆的前后左右各安装一个图像采集摄像头,同时,为定位测试场景位置信息,需要加装一套全球定位系统,要求定位系统的定位精度在20cm以内,车辆周围的图像实时在如图6所示的软件上显示,同时,将测试车辆的速度、方向盘转角等信息进行实时显示。
为测试车辆盲区监测系统性能,将测试试验分为两类:标准法规测试和公开道路测试。标准法规测试主要测试车辆盲区监测系统是否满足法规的要求,在规范层面上判断车辆盲区监测系统是否满足法规的标准。公开道路测试主要体现车辆盲区监测系统的可靠性,从而从用户的层面考虑车辆盲区监测系统对驾驶员的影响,以及驾驶员对盲区监测系统的信任度。
3.1 标准法规测试
在进行标准法规测试时,根据《道路车辆盲区监视系统(BSD)性能要求及试验方法》法规要求,设计测试场景,统计测试数据。目标车辆分为摩托车和普通车辆,主要涉及的控制参数有试验车辆的行驶速度,目标车辆驶行速度,目标车辆与试验车辆之间的横向距离,目标车辆的侧向速度,目标车辆与试验车辆之间的纵向距离。
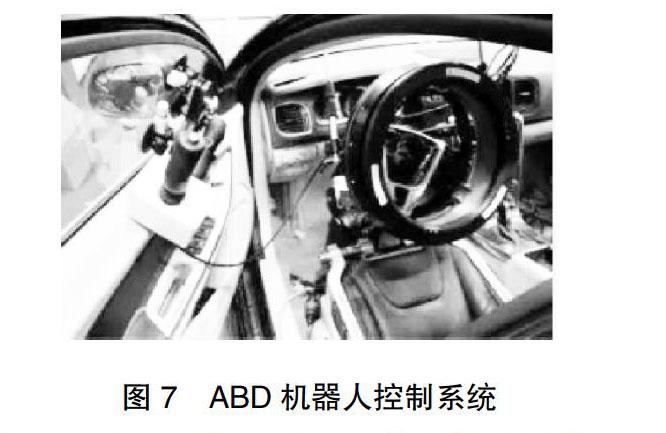
为实现对测试车辆和测试车辆的参数控制,需要在目标车辆上加装一套高精度的GPS全球定位系统和如图7所示的ABD机器人控制系统。
目標车辆与试验车辆两者之间的数据交互使用大功率电台实现,将试验车辆的GPS定位信息和车速信息传输给目标车辆系统,从而计算目标车辆与试验车辆之间的距离,以此改变目标车辆的控制行为。
同时将目标车辆的关键车速和位置等信息反向传输给试验车辆,通过图5所示的数据采集与分析软件进行数据保存,从而有效的数据进行分析。
3.2 公开道路测试
公开道路测试指试验车辆进行城市、高速、乡村等场景测试,统计不同驾驶员驾驶车辆时对盲区监测系统性能的评价分数,以及统计盲区监测系统的报警数据和应报警而为报警数据。为实现系统评价,系统设计典型的盲区监测系统测试的性能指标,用来统计、分析和对比盲区监测系统的性能,主要分析测试的性能指标如下:
k1为100公里虚警率,k2为100公里漏报率,d1为汽车每行驶100公里盲区监测系统的虚警次数,d2为汽车每行驶100公里盲区监测系统的报警次数,d3为汽车每行驶100公里盲区监测系统的漏报次数,k3为100公里虚警率与漏报率之间的比值。
不同驾驶员对盲区监测系统性能进行评价时,其评价分数表如表1所示,评价分为4个等级,评价结果小于6分为
对所有驾驶员的评价分数进行统计,最终的评价分数如式4进行计算:
式中pi为第i个驾驶员对盲区监测系统的评价分数,n为驾驶员人数,从而得到盲区监测系统驾驶员综合评价分数。
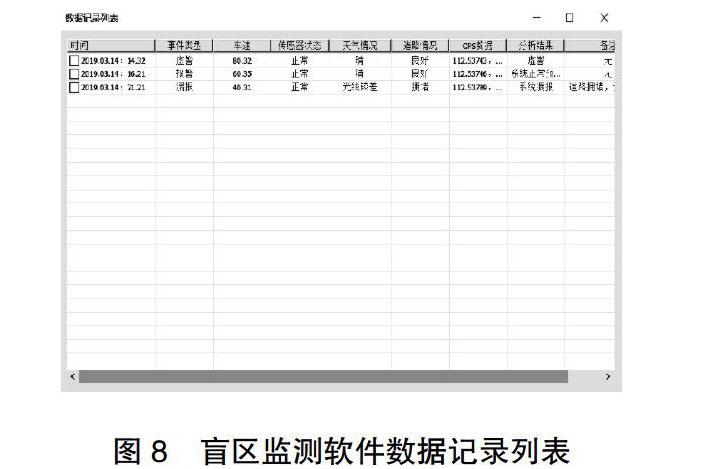
车辆盲区监测系统测试软件将每次的预警、漏报、误报事件都进行记录,记录列表如图8所示,记录数据包括时间、GPS数据等关键数据,以便进行数据分析。
4 结论
通过盲区监测系统法规和测试事项的理解,搭建虚拟测试和实车测试场景,开发用于测试分析的车辆盲区监测系统测试软件,能够有效的加快测试进度,保证大规模的实车测试,有效的降低了人员开销,保证盲区监测系统测试进度。同时,通过标准法规测试和公开道路测试以及不同驾驶员对盲区监测系统进行评价,从而得到盲区监测系统的性能指标,方向引导盲区监测系统的开发。
参考文献
[1] 李华俊.盲区监测变道辅助系统标定方法的研究[J].汽车电器, 2017(09):7-11.
[2] 张正轩.重卡驾驶员视野盲区监控系统研究[D].长安大学,2017.
[3] 邢春鸿.盲区监测系统公开道路测试方法研究[C].2018中国汽车工程学会年会论文集.北京:机械工业出版社,2018:262-265.
[4] 李艺.盲区监测系统的场地测试评价方法研究[C].2018中国汽车工程学会年会论文集.北京:机械工业出版社,2018:146-151.
[5] 刘保祥.基于毫米波雷达的汽车盲区监测系统研究[J].北京汽车,2019(05):21-23+34.
[6] 孙会明.基于毫米波雷达的汽车开门防撞预警关键技术研究[D].扬州大学,2018.
猜你喜欢
科教导刊(2016年27期)2016-11-15
中国市场(2016年38期)2016-11-15
企业导报(2016年19期)2016-11-05
科技视界(2016年18期)2016-11-03
时代金融(2016年23期)2016-10-31
职业(2016年10期)2016-10-20
课程教育研究·学法教法研究(2016年21期)2016-10-20
商业会计(2016年13期)2016-10-20
科技视界(2016年20期)2016-09-29
科技视界(2016年20期)2016-09-29
