改进的PBAS算法在抛物识别中的应用研究
2020-10-20 05:34唐德谦宋刚伟张进李钧周风娥张继康
计算技术与自动化 2020年3期
唐德谦 宋刚伟 张进 李钧 周风娥 张继康

摘 要:为了提高在监控视频下进行抛物识别的快速性及准确性,消除ghost区域存在的干扰以及PBAS算法存在的动态背景效果差的问题,提出了一种改进的PBAS算法。介绍了背景减除法与PBAS算法的理论基础,然后提出了一种改进的PBAS算法,并应用于抛物识别中,最后分别在纯净背景和复杂背景下进行抛物识别对比实验。实验证明文中改进的PBAS算法能够完全去除ghost带来的影响,该算法具有更高的检测率和准确率,实现了更好的抛物识别效果,有效提高了识别的平均处理速度,可以在监控视频中更精准、实时地呈现抛物现场的视频数据等信息,更好地满足在抛物识别中的实际应用。
关键词:PBAS算法;背景减除法;抛物识别;鬼影消除
中图分类号:TP391 文献识别码:A
Application of Improved PBAS Algorithm in Throwing Recognition
TANG De-qian,SONG Gang-wei?,ZHANG Jin,LIN Jun,ZHOU Feng-e,ZHANG Ji-kang
(State Grid Shaanxi Ankang Hydropower Station,Ankang,Shaanxi 725000,China)
Abstract: In order to improve the speed and accuracy of throwing recognition in surveillance video,eliminate the interference in ghost region and the poor dynamic background effect of PBAS algorithm,this paper studies and proposes an improved PBAS algorithm. Firstly,the theoretical basis of background subtraction and PBAS algorithm is briefly introduced. Secondly,an improved PBAS algorithm is proposed by combining the two algorithms. The algorithm is applied to throwing recognition. Finally,the throwing recognition experiments are carried out under two different backgrounds. Experiments show that the improved PBAS algorithm can completely remove the impact of ghost. And the algorithm has higher detection rate and accuracy,and achieves better throwing recognition effect. It effectively improves the average processing speed of recognition,and presents more accurate and real-time information such as throwing field video data in surveillance video,so as to better meet the practical application in throwing recognition.
Key words:PBAS algorithm;background subtraction;throwing recognition;ghost removal
随着计算机技术的不断发展,智能视频监控系统也得到了迅速发展,它可以智能地分析和处理视频图像序列,实现了对监控场景中运动目标的检测与分析,并已广泛应用于国民生活的各个领域[1-2]。由于当前城市的快速发展,高楼建筑越来越常见,抛物行为也多发生于高楼小区以及建筑工地等地方,其所引发的安全问题也越来越倍受关注[3-4]。抛物具有的突发性、危害性及不可回避性,一旦发生,不仅破坏环境,而且还存在着安全隐患[5-6]。
在现有针对抛物的技术方案中,通常会部署大规模的网络视频监控系统,该系统具有大数据量的采集前端,从而导致需要处理的视频数据量呈现指数形式的增长。而传统的视频监控系统通常是以人工监测为主,当监控人员长时间面对监控视频时,容易产生视觉疲劳,很难及时察觉抛物事件的发生,虽然耗费了大量的人力、劳力,但是很难快速且有效地处理这些海量的数据[7-8]。
基于此,提出了一种应用在抛物识别中的改进的PBAS算法,可以将监控画面实时传送到后台,一旦有物体落下,可以实时捕捉定位抛物位置,进行抛物管理系统实时预警,并将预警图像进行保存。有效提高了识别的速度及准确度,为在监控视频下实现抛物行为的及时发现及预警提供了有效的方法。
1 改进的PBAS算法
1.1 PBAS算法
Hofmann等人于2012年提出了一種基于像素模型得自适应背景分割算法(Pixel-Based Adaptive Segmenter,PBAS)[9-10],该算法的背景模型是通过采集背景样本构建而成的,并且自适应的优化了模型中的阈值和更新率,降低了背景产生的误检率。
PBAS算法结合了SACON算法和VIBE算法的优点[11-13],并以此为基础进行了改进,主要特点是引进控制论思想和对背景复杂度的度量方法,使前景判断阈值和背景模型更新率随着背景复杂度的变化而自适应变化,并且随之及时更新,因此PBAS算法对实时监控视频处理效果较好。PBAS算法具有自适应背景样本集更新策略,这比VIBE算法的固定更新样本集策略能够更好的在实际情况中使用。但是依然存在ghost区域干扰、动态背景效果差的问题。
1.2 背景减除法
背景减除法的基本原理是将背景模型图像与后续视频帧进行比较,并通过差分运算和阈值化处理达到运动目标分割的目的[14]。背景模型是基于视频图像序列中像素点的分布,建立一个近似当前视频图像序列得到的。若背景模型与后续视频帧之间的差别不大,那么其对应的像素点灰度值的差值也相对较小,这些区域会被舍弃;而对于具备运动物体的情况,像素点灰度差值较为明显,相应区域将会被保留下来。
设B(x,y)为背景模型图像,F(x,y,t)为t时刻当前视频帧图像,为当前帧图像与背景模型图像的差分图像,三者关系如公式(1)所示:
其中(x,y,t)是t时刻像素的空间坐标。
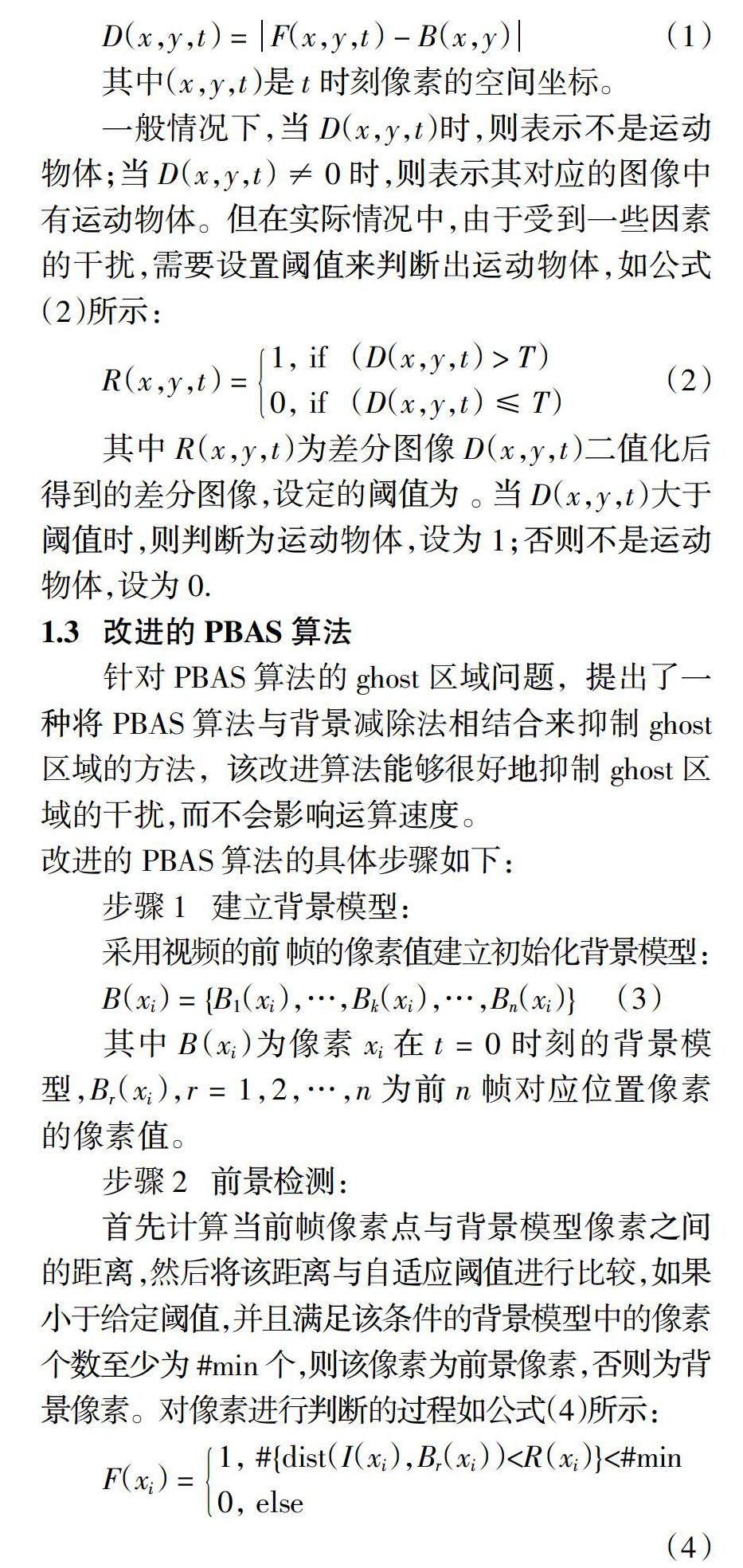
一般情况下,当D(x,y,t)时,则表示不是运动物体;当D(x,y,t) ≠ 0时,则表示其对应的图像中有运动物体。但在实际情况中,由于受到一些因素的干扰,需要设置阈值来判断出运动物体,如公式(2)所示:
其中R(x,y,t)为差分图像D(x,y,t)二值化后得到的差分图像,设定的阈值为 。当D(x,y,t)大于阈值时,则判断为运动物体,设为1;否则不是运动物体,设为0.
1.3 改进的PBAS算法
针对PBAS算法的ghost区域问题,提出了一种将PBAS算法与背景减除法相结合来抑制ghost区域的方法,该改进算法能够很好地抑制ghost区域的干扰,而不会影响运算速度。
改进的PBAS算法的具体步骤如下:
步骤1 建立背景模型:
采用视频的前 帧的像素值建立初始化背景模型:
其中B(xi)为像素xi在t = 0时刻的背景模型,Br(xi),r = 1,2,…,n为前n帧对应位置像素的像素值。
步骤2 前景检测:
首先计算当前帧像素点与背景模型像素之间的距离,然后将该距离与自适应阈值进行比较,如果小于给定阈值,并且满足该条件的背景模型中的像素个数至少为#min个,则该像素为前景像素,否则为背景像素。对像素进行判断的过程如公式(4)所示:
当F(xi) = 1时,该像素为前景候选像素,当
F(xi) = 0时为背景候选像素。其中I(xi)为当前帧像素点的像素值,R(xi)为自适应的阈值,该值是变化的,#min为最小匹配数目,该值是一个固定值。
步骤3 背景模型更新:
若某个像素点被判定为背景像素,则需要在背景模型中随机选择一个像素,并用被判定的像素去更新,而且还要随机选择该像素邻域的其他像素进行更新。若T(xi)为背景的更新率,则背景模型将以1/T(xi)的概率进行更新。
1) 在初始化过程中,各个像素的阈值由前n帧的n个距离的最小值的平均值来决定,最小距离矩阵用公式(5)来表示:
其中Dr(xi) = min(dist(I(xi),Br(xi))),r = 1,2,…n。
对于每帧的每个像素,其n个最小值的平均值可以用公式(6)来表示:
2) 自适应阈值R(xi)的更新,其更新公式可由公式(7)来表示:
其中Rinc/dec和Rscale都是事先设定的固定值,Rinc/dec为阈值的变化量,Rscale用于控制背景复杂度对判别阈值的调整。
3) 背景更新率T(xi)的更新,其更新公式可用公式(8)来表示:
其中Tinc和Tdec也是预先设定的固定值,分别为更新率增加、减小的幅度,F(xi)为前景检测结果。
步骤4 为了达到消除ghost区域的目的,采用背景减除法来判断前景像素点是否是运动物体。
改进的PBAS算法的流程图如图1所示:
2 将改进的PBAS算法应用于抛物识别
为了及时的通过视频监控对抛物行为进行识别与预警,最大程度的减少人员伤亡及损失,因此需要较快的抛物识别速度及准确的定位相关责任人[15,16]。鉴于此,将改进的PBAS算法应用于抛物识别中,以提高在抛物发生过程中识别的准确性、及时性以及用户体验。
该过程的具体步骤为:
步骤1 输入视频帧,为了加快视频帧的后续处理,本文采用了跳帧处理以及对每帧图像进行了裁剪的处理;
步骤2 建立背景模型;
步骤3 采用改进的PBAS算法进行运动目标的检测并消除ghost区域;
步骤4 对得到的前景目标进行轮廓查找,通过满足一系列的条件之后,得到目标轮廓;
步驟5 检查是否找到了抛物轨迹上的所有轮廓,若是,则结束,反之,重复步骤3和4。
具体的流程图如图2所示:
3 实验结果与分析
在实验的时候选择两个应用场景,场景一是视频背景比较纯净的地方;场景二是视频背景稍微复杂的地方。
为了验证文中算法在抛物识别中的优越性,将本文算法与原PBAS算法的对比实验分别在场景一和场景二中进行。分别在两个场景中进行100次实验,每次使用视频的帧率为25帧/秒,视频图像的大小均相同,并且在每次实验中,两种算法中部分固定参数的取值均为:N = 20,Bmin = 2,Rinde = 0.05,Rlower = 18,Rscale = 5,Tinc = 1,Tdec = 0.05,Tupper = 200,Tlower = 2。
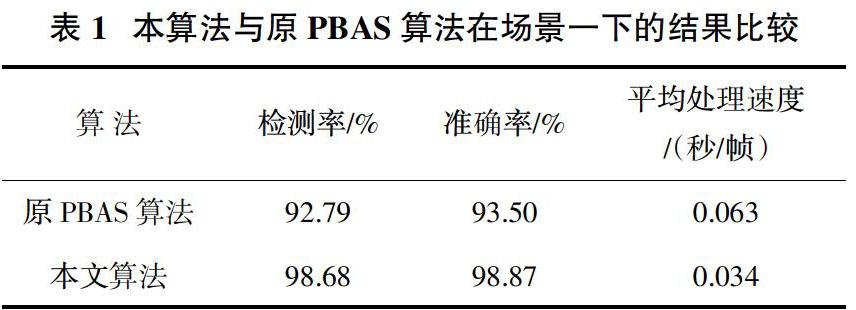
在相同的条件下,分别测得本文算法与原PBAS算法在检测抛物识别过程中的效果,场景一中的效果如图3和图4所示,场景二中的效果如图5和图6所示;并分别采用检测率、准确率和平均处理速度来衡量算法的检测效果和实时性,将最终得到的结果分别取平均值,场景一中的实验结果如表1所示,场景二中的实验结果如表2所示。
由以上四组图的对比分析可以看出,无论是在场景一还是在场景二中,在采用原PBAS算法识别的图中,可以明显的看到ghost区域的存在,而本算法已经完全去除了ghost带来的影响。因此,进行抛物识别的实验效果要远好于原PBAS算法,证明了本算法在提取前景方面的优越性。
由上面两个表格中的结果对比分析可以得出,在两个场景下,本算法在检测率和准确率上都有更好的效果,此外在平均处理速度上,本算法也要优于原PBAS算法,完全能够满足实时性的要求。实验取得了良好的效果,因此本文将改进的PBAS算法应用于抛物识别是可行和有效的。
4 结 论
将改进的PBAS算法应用于抛物识别进行了研究。介绍了改进的PBAS算法和将改进的PBAS算法应用于抛物识别的具体过程,分别对原PBAS算法和本算法进行对比实验,实验结果也证明了将改进后的PBAS算法应用于抛物识别的可行性及有效性。该方法适用于检测前景的实时监控系统,可实现对抛物情况的高效实时报警,有效帮助相关部门提高在抛物环境下突发事件的快速响应和应急处理能力,具有一定的应用前景。
参考文献
[1] 黄富瑜,沈学举,刘旭敏,等. 基于空时域融合处理检测超大视场红外目标[J]. 光学精密工程,2015,23(8):2328-2338.
[2] QIN Han-lin,HAN Jiao-jiao,YAN Xiang,et al. Infrared small moving target detection using sparse representation-based image decomposition[J]. Infrared Physics & Technology,2016,76:148-156.
[3] 孙辉辉,初琦. 数据链技术在机载光电吊舱中的应用[J]. 电光与控制,2013(5):85-87.
[4] 杨先凤,杨燕. 一种基于HOG-LBP的高效车辆检测方法[J]. 计算机工程,2014,40(9):210-214.
[5] OGATA T,TAN J K,ISHIKAWA S. High-speed human motion recognition based on a motion history image and an eigen-space[J]. IEICE Transactions on Information and Systems,2006,89(D(1)):281-289.
[6] 何亮明,胡茂林,刘海涛. 周界视频监控中抛物检测算法[J]. 天津大学学报,2011,44(3):242-247.
[7] ZOU Q,LING H,LUO S,et al. Robust nighttime vehicle detection by tracking and grouping headlights[J]. IEEE Transactions on Intelligent Transportation Systems,2015,16(5):2838-2849.
[8] GOMES V,BARCELLOS P,SCHARCANSKI J. Stochastic shadow detection using a hypergraph partitioning approach[J]. Pattern Recognition,2016,63:30-44.
[9] MARTIN H,PHILIPP T,GERHARD R. Background segmentation with feedback:the pixel-based adaptive segmenter[J]. Computer Vision and Pattern Recognition Workshops,2012 IEEE Computer Society Conference,2012:38-43.
[10] HOFMANN M,TIEFENBACHER P,RIGOLL G. Background segmentation with feedback:the pixel-based adaptive seg-menter [C] // Proc of Computer Society Conference on Computer Vision and Pattern Recognition Workshops,2012:38-43.
[11] WANG H,SUTER D. Background subtraction based on a robust consensus method[C] // IEEE International Conference on Pattern Recognition,2006:223-226.
[12] BARNICH O,VANOGENBROECK M. ViBE:a powerful random technique to estimate the background in video sequences[C] // IEEE International Conference on Acoustics,Speech and Signal Processing,2009:945-948.
[13] BARNICH O,DROOGENBROECK M V. ViBe:a universal background subtraction algorithm for video sequences [J]. IEEE Transactions on Image Processing,2011,20 (6):1709-1724.
[14] HAN B,DAVIS L S. Density-based multi-feature background subtraction with support vector machine[J]. Pattern Analysis and Machine Intelligence,IEEE Transactions on,2012,34(5):1017-1023.
[15] 宋煥生,张向清,郑宝峰,等. 基于深度学习方法的复杂场景下车辆目标检测[J]. 计算机应用研究,2018,35(4):1270-1273.
[16] 高红红,曹建荣,李振宇,等. 基于背景分类的运动目标检测算法[J]. 计算机工程与应用,2017,53(21):179-184.