
数值迭代算法下的智能插秧机插秧路径规划
2020-10-17 01:16:42王大鹿
农机化研究 2020年11期
王大鹿
(黄河水利职业技术学院,河南 开封 475000)
0 引言
我国是农业大国,人口众多,对农产品的需求量很大。随着我国耕地面积的减小和农业从业人员的减少,对农业生产的高效生产、农业资源充分利用和农业从业人员的工作强度和工作效率方面提出了更高的要求。插秧工作属于密集型作业,作业时间长、强度大。随着我国机械自动化程度的提高和电子技术、计算机技术等技术的迅猛发展,提出了精细农业技术的概念[1-2]。该技术以信息通信技术和智能技术为核心,可以有效降低劳动强度,实现精准作业,保证插秧机的作业效率。
在研究智能化和自动化插秧机的过程中,核心问题是路径规划。传统的插秧机作业主要依靠人工进行操控,包括对行驶速度和位置的判断,导致插秧的准确率和效率较低,容易出现重复插秧、漏行和不能遍历栽种区域的问题,且能量消耗大。因此,对插秧机的智能化研究首先需要有合适的路径规划方法,使插秧机以较小的能量遍历农作物区域,避免重复插秧或部分土地区域未覆盖的情况,同时还可避开待插秧区域的障碍物,以保证插秧机的最优路径和最低能耗,从而提高插秧工作效率,降低农民的劳动作业强度[3-4]。
路径规划是指机器从一点以某种法则避开障碍物,遍历区域到达另一点。国内外学者对路径规划进行了较深入地研究,目前应用较多的算法有人工势场法[5]及遗传算法[6]等。人工鱼群算法属于迭代算法,具有较强的鲁棒性和优化性能[7],在路径规划问题上有广泛的应用,但用时较长、精度较低。因此,本文将人工鱼群算法进行优化,对插秧机路径规划进行研究。
1 总体设计思路
1.1 技术路线
插秧机的路径规划系统硬件主要由传感器系统、电动方向盘、档位自动化安装系统和油门自动化安装系统组成。工作时,通过路径规划控制算法对插秧机进行全覆盖路径规划,插秧机按照路径行驶,并结合导航控制算法保证插秧机不偏离路线。其技术路线如图1所示。
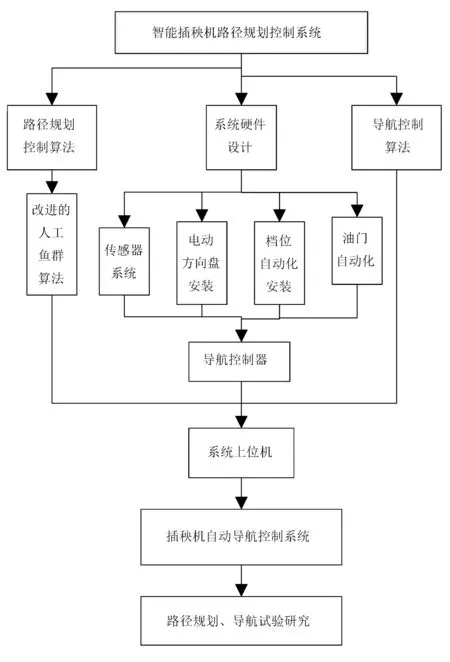
图1 智能插秧机路径规划技术路线
1.2 GPS定位系统
为规划插秧机的行驶路径和实现自主导航,首先需要确定插秧机的具体位置坐标,本文采用GPS系统进行定位。该系统具有适应性强和可长时间定位的优点,但精度较低。为保证定位精度,将GPS和GIS系统结合对插秧机进行定位。
1.3 传感器系统
插秧机在行驶过程中需要自身的位置和感知插秧机周边环境情况,以便进行路径规划。该传感器系统主要包括陀螺仪传感器、速度传感器、加速度传感器和超声波传感器。
陀螺传感器用于检测插秧机行进过程的转向角度,通过感应机构检测3条正交的轴向陀螺仪进行测量。传感器连接如图2(a)所示。
(a)
速度传感器和加速度传感器用于测量插秧机在插秧过程中的实时速度和加速度,保证插秧机在行进过程中可以根据地形状况按照预设的速度行驶,当速度偏离时,可以实时调整。通过对传感器的输出数据进行处理,可以得到实时加速度值,对其进行积分即为当前速度。插秧机的3个轴向速度Vxt、Vyt、Vzt可分别表示为
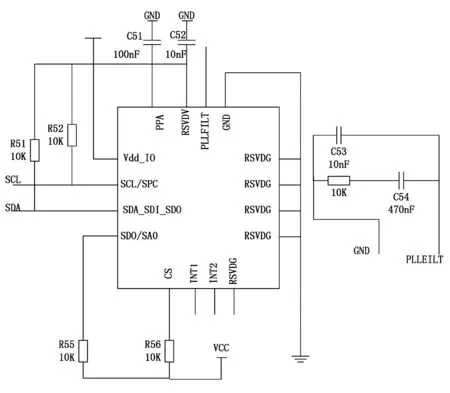
其中,Vxt-1、Vyt-1和Vzt-1分别为插秧机上一个时刻的瞬时速度,ax、ay和az分别为3个轴向加速度值,dt为程序的运行时间。该加速度传感器通信方式为I2C,其连接方式如图2(b)所示。
1.4 电动方向盘
插秧机的方向盘为电动自动方向盘,由步进电机驱动。工作时,小链轮在链条的带动下,使大链轮同向转动,大链轮与方向盘连接,进而带动方向盘运动。该方向盘既可通过步进电机实现自动转向,又可采用人工进行转弯控制。
1.5 档位自动化和油门自动化
插秧机的速度通过档位进行调整,速度既可自动调控,又可人工调控,其档位示意图如图3所示。由步进电机作为驱动源控制曲柄的运动,实现对无极变速系统的自动控制;档位操控杆则通过人工对速度进行操控。油门自动化由通过电动推杆对插秧机的加速度进行自动调控实现。
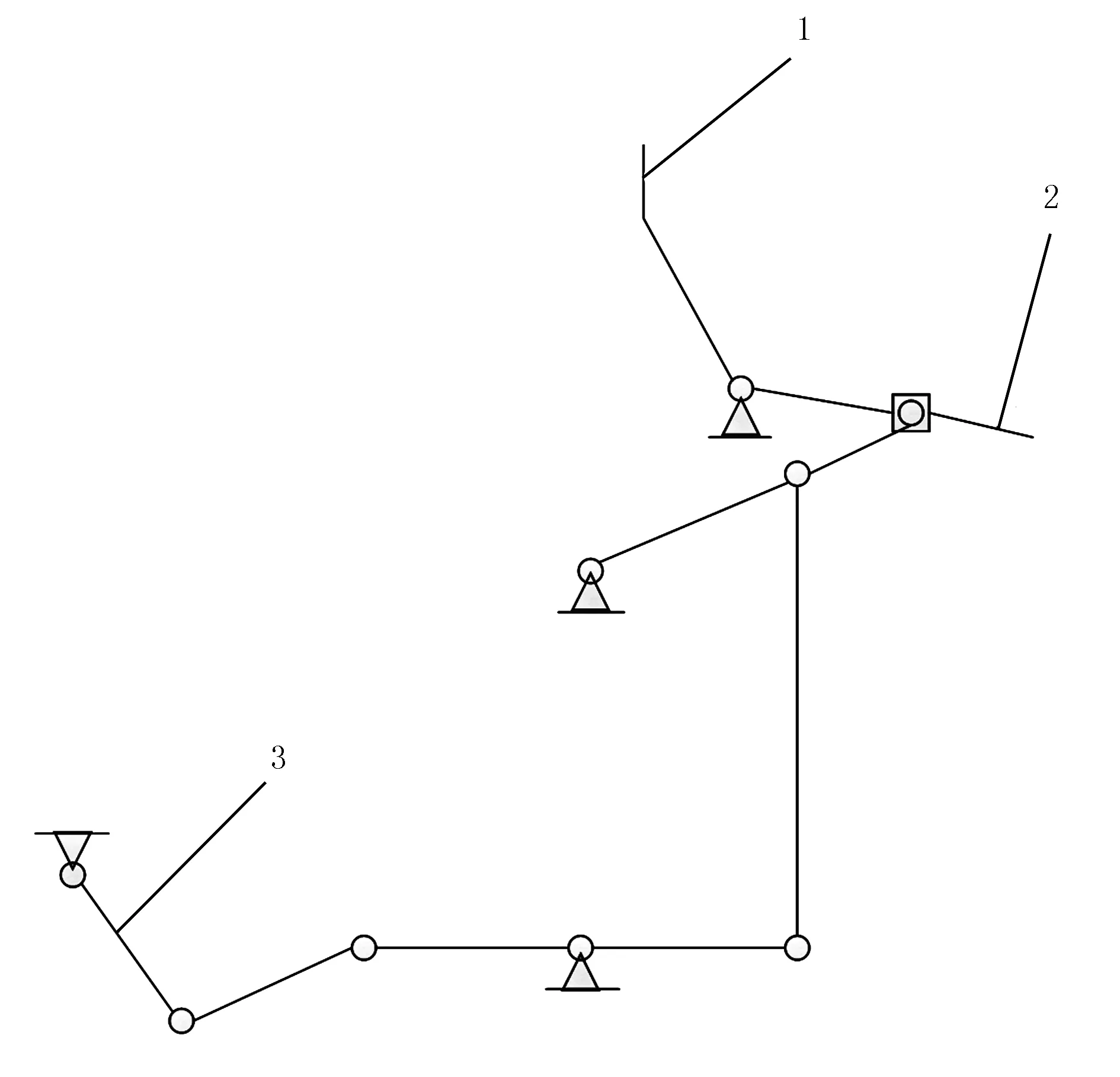
1.档位操纵杆 2.曲柄 3.无级变速控制杆图3 插秧机档位示意图
2 路径规划控制算法
插秧机路径规划的目的是既要保证遍历待插秧区域,又要保证不重复插秧和漏插秧的状况出现,还要保证能量最小原则。为此,采用人工鱼群的算法对插秧机路径进行规划。由于该算法容易陷入局部极值陷阱,且计算量过大导致运算速度慢,因此对人工鱼群算法进行改进,对插秧机路径进行规划。该算法的执行步骤如图4所示。

图4 改进人工鱼群算法执行步骤
1)首先将人工鱼群算法初始化。
2)设置网格划分数目为N。插秧机的运动空间为2维区间,网格的划分策略为[Xl,Xu]。其中,Xl=[X1l,X2l],Xu=[X1u,X2u]。在该2维空间的每一维均划分为N个网格,因此在插秧区域可以得到N×(N+1)个网格点[8]。
3)确定网格变量范围。计算该二维区间内的网格之间长度Lth,即
Lth=(Xiu-Xil)/N,i=1,2
4)全局搜索网格点浓度最高位置。首先,定义鱼群中心网格点X'ij的位置为
Xct=min(d'ij),i,j=1,2
其中,d'ij为该鱼群范围内的网格点与鱼群中心网格点之间的距离。规定了向量Pi为
其中,Yi和Y'i为网格点Xi和X'i的目标函数值。若鱼群中心位置的网格点食物浓度最高,则人工鱼从当前位置转移至中心点,中心点即为下一个目标点,此时有
Xin=Xi+Pi·Lthi=1,2
若食物浓度最高点不是在中心位置,则需要遍历人工鱼周围网格点。
5)遍历周围网格点寻找浓度最高点。在遍历之前,首先需要建立禁忌表和公告牌。禁忌表用于记录人工鱼搜索过的网格点位置和最优位置,当进行下一次扩大范围搜索时,网格点位置与禁忌表进行对比即可,若该搜索位置在禁忌表中,即停止搜索,该点即为区域最优解位置。公告牌则用于将每次算法的最优解进行记录。通过引入禁忌表和公告牌,可以省去不必要的迭代计算时间,提高运算速度。在执行遍历人工鱼周围的网格点,寻找浓度最高点过程中,若该点位置出现在禁忌表,则该点为该区域最优解。同时,将该点与公告牌数据进行对比,若该位置点的网络目标函数更符合要求,则更新公告牌;若该点位置未出现在禁忌表中,则初始化人工鱼群算法,并扩大全局搜索的范围。
通过对人工鱼群算法进行改进,包括引进禁忌表和公告牌,调整人工鱼觅食和聚群行为的方法,不断对待插秧区域的网格点进行迭代计算,即可得到遍历该区域各目标点的最优路线,该方法可以大大提高计算速度和路径规划的精度。
3 试验结果
根据插秧机全覆盖路径规划的性能要求,首先需要制定评价插秧机路径规划的指标,主要有以下几个:①区域覆盖比率;②路径重复比率;③遍历路径成本;④遍历时间。
3.1 算法有效性
为验证本文改进的人工鱼群算法的有效性,在计算机内部随机生成10×10的网格,在相同的条件下运行人工鱼算法和改进的人工鱼算法,设置迭代次数分别40、80和100,统计各算法运行时间,路径长度。为保证结果的准确性,每个算法重复进行20次,结果取平均值。其结果如表1所示。
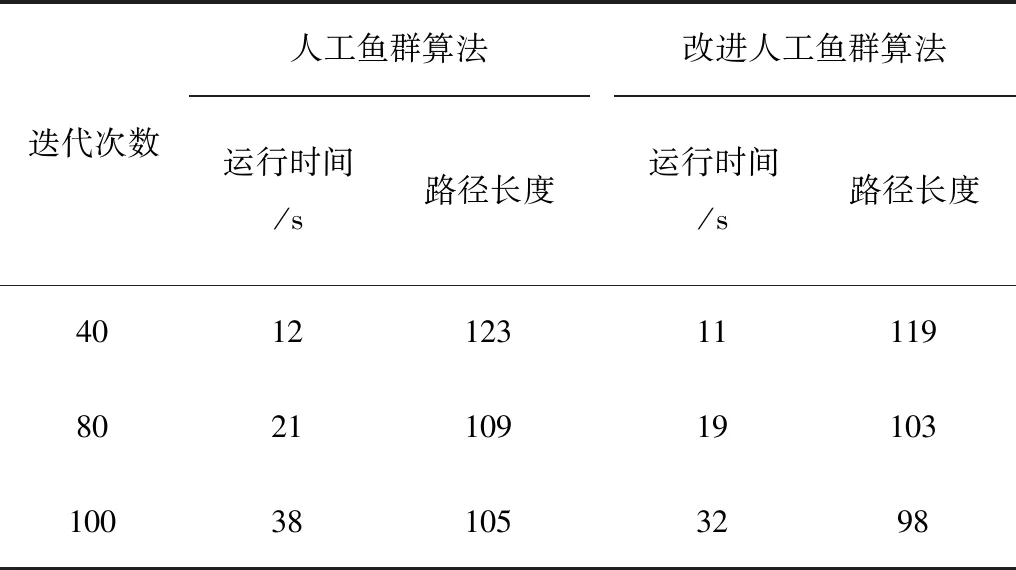
表1 人工鱼群算法和改进的人工鱼群算法运行结果对比
由表1可知:改进的人工鱼群算法的运行速度高于人工鱼群算法,路径长度也较短。经分析发现,人工鱼群算法容易陷入局部最优解,导致其运算结果的精度和运算速度的下降。
3.2 田间试验
在50m×20m的土地上开展路径规划的试验,设置行驶速度为3m/s。分别按照以下路径使插秧机在土地行驶:①按照本算法规划路径行驶;②往返式全覆盖路径行驶;③回字形全覆盖路径行驶。统计3种全覆盖路径的各指标,根据这些指标对插秧机的路径进行评价,结果如表2所示。
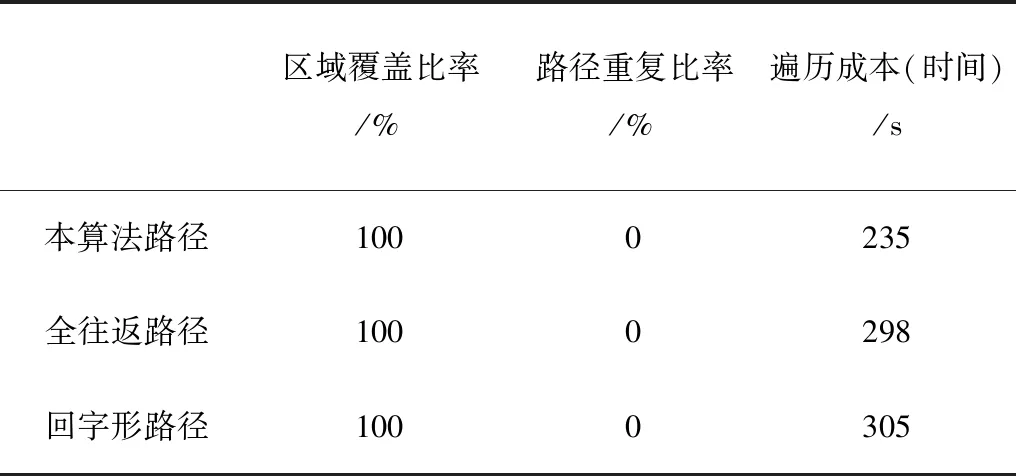
表2 插秧机路径规划试验结果
由表2可知:3种全覆盖路径的覆盖比均为100%,重复比为0,本算法的遍历时间最短,成本最低,回字形时间最长,往返式时间居中。通过分析发现,回字形路径后期转弯较多导致作业时间延长,往返路径由于地头转弯较多浪费了时间。本算法路径既可以覆盖待插秧区域,还可以保证成本的最低,符合插秧机的工作要求。
另外,根据插秧机环境的不同,路径全覆盖率可能会有所不同,有不同程度的重复和漏插秧的情况存在,但在路径规划时还需要按照最优路径工作。
4 结论
1)设计了智能插秧机路径规划系统,主要包括传感器系统、电动方向盘、档位自动化安装系统和油门自动化安装系统。
2)路径规划系统基于数值迭代算法,通过改进人工鱼群算法,包括引入禁忌表和公告牌,改进人工鱼觅食和聚群行为,以提高算法的计算速度和精度。
3)试验结果表明:系统可以保证以较低的成本进行全覆盖路径规划,且有低重复比,能够满足插秧机的路径规划要求。
猜你喜欢
南方农机(2022年23期)2022-12-01 09:07:14
中外文摘(2017年19期)2017-10-10 08:28:41
数学大王·低年级(2017年9期)2017-09-18 18:33:13
湖南农业(2016年3期)2016-06-05 09:37:35
电测与仪表(2016年3期)2016-04-12 00:27:44
电测与仪表(2016年20期)2016-04-11 11:38:08
中外文摘(2014年23期)2015-04-15 08:58:23
河南城建学院学报(2015年4期)2015-02-27 07:09:13
湖南农业(2013年12期)2013-04-07 22:41:34
晚报文萃·开心版(2009年16期)2009-10-27 10:22:12
