
工业自主移动无人载具调度系统中的路径规划策略研究
2020-10-13 09:47林蔚
数码设计 2020年6期


摘要:随着自动化机器人技术和网络通信技术的发展,在工业场域实践中,可自主移动的无人载具逐渐尝试取代人工驾驶的叉車等传统载具导入物料搬运流转流程中。其中,高效的无人载具调度系统为实施的核心技术,负责调度无人载具将工件由存放中心有效地运输到工作中心。本文将对无人载具调度系统中的路径规划策略进行说明及比较。
关键词:无人载具调度系统;路径规划策略;集成决策
中图分类号:TP242 文献标识码:A 文章编号:1672-9129(2020)06-0054-02
Abstract:Withthedevelopmentofautomaticrobottechnologyandnetworkcommunicationtechnology,inindustrialfieldpractice,unmannedvehiclesthatcanmoveautonomouslyaregraduallytryingtoreplacetraditionalvehiclessuchasforkliftsdrivenbyhumanbeingstobeintroducedintothematerialhandlingflow.Amongthem,efficientunmannedvehicledispatchingsystemisthecoretechnologyofimplementation,whichisresponsiblefordispatchingtheworkpiecefromthestoragecentertotheworkcentereffectively.Inthispaper,pathplanningstrategiesinunmannedvehicleschedulingsystemaredescribedandcompared.
Keywords:unmannedvehicleschedulingsystem;Pathplanningstrategy;Integrateddecisionmaking
引言:无人载具调度系统的设计问题由许多决策变量组成,先进的自动化调度系统的研发和使用可极大地提升工业物流效率。标准的调度系统应具有以下调度及控制功能:敏捷的流程配置,可靠的死锁避免和冲突解决策略,可定位的停靠位置,成熟的混合方向配置,可根据载具搬运参数、负载及任务状态动态选择路线。调度系统可有效减少搬运工作的用时,减少空载及调度时间,平衡载具的工作量。
调度系统的性能直接关系到整个搬运系统的性能。通过研究改进调度策略和算法,如路径规划策略、避免死锁算法、调度规则、吞吐量分析模型、负载均衡策略、无冲突移动策略、冲突解决策略等所有方面的相互集成,可有效提升搬运系统性能。本文将对各种路径规划策略及其特性、优缺点和对系统性能参数的影响进行分析。
1路径规划策略
调度系统中的路径规划和布局设计问题被认为是研究无人载具在搬运系统中高效运行的最基本问题之一。路径规划策略的设计很大程度上取决于工作场域的布局。在布局中,路径通常以通道、转弯点和交叉点组成,并可在通道上的任何位置设置停站点。无人载具在通道上移动,同时将工件从一个停站点运送至另一个停站点。具有起始停站点和结束停站点的有向通道表示无人载具的行进方向。这表明与路径规划策略有关的问题也可以使用基于网络的系统方法进行分析。
文中根据路径拓扑图、通道类型和移动方式来研究的路径规划策略的特性。
(I)路径拓扑图:无人载具在场域中的各类移动路径的布局图。
(II)通道类型:通道有单通道和平行通道两种,平行通道指路径策略中提供两个彼此平行并且通行方向相反的通道。
(III)移动方式:无人载具通常有单向和双向两种移动方式。单向移动可以简化调度逻辑,但会牺牲时间代价;而双向移动可加大搬运吞吐量,但容易导致死锁或与发生路径冲突。
1.1路径规划策略的比较指标。在路径规划策略设计的背景下,无人载具的工作性能参数,即稼动率、运输耗时、任务队列长度和物料转移成本等,取决于路径规划策略的是否有效设计和实施。其中,无人载具行驶总距离的最小化是最典型的性能指标。经研究,载具部署的规模、路径长度和路径策略,可作为具有目标函数的多准则决策问题计算得出最优解。而系统运行后的空载行驶时间、死锁或干扰发生的概率和时长、运输失败率等数据,可作为分析搬运系统整体性能的参考指标。
1.2常规单向路径规划策略。在常规单向路径规划策略中,所有停站点都通过一条通道连接。通道可能具有交叉点和捷径。通道可以是单向的,也可以是双向的。单向通道仅允许车辆朝一个方向行驶,而在双向通道系统中,载具可以朝前后两个方向行驶。
常规单向路径规划策略是最基本最直接的路径规划策略。此策略中通道的布局可以直接由实际工作区域的连线构成,并根据实际需求确定载具数量配置、速度设定和调度规则。其优势在于规划直观便捷,缺点在于通常缺乏灵活性且未考虑最优路径。
1.3常规双向路径规划策略。常规单向路径规划策略的改进是采用双向通道系统,即载具可以按照搬运要求在前后两个方向行进。与单向通道设计相比,双向通道的设计,但系统的控制复杂度会大幅提高。双向平行通道的优势在于提供更大的灵活性和效率,载具间碰撞和相互干扰的概率大幅极低。缺点在于系统调度复杂度提升,在任何设施中规划平行车道的成本较高,并且需要更多空间。
1.4单环路径规划策略。环状路径指设施中的路径只由通道和转弯点组成,无捷径且形成闭环。其中最基本的策略称为单环路径规划策略,即无人载具仅沿单方向环路行进。
单环路径系统的优势在于在部署的载具运行参数一样的前提下,发生路径死锁或碰撞的机会几乎为零。但少数场景下若需要使用混合载具,即多个载具以不同的速度运动时,碰撞的可能性会提升。在部署相同数量载具的前提下,单环路径策略的局限性在于吞吐量较小,需要通过增加载具部署以提升搬运吞吐量。在实际应用中,单一使用单环路径策略的场景较少,通常以单环路径为基础,多个环路混合规划。
1.5串联路径规划策略。串联路径规划就是以单环路径为基本单元通过串联方式组合的路径策略,其中最基本的配置方式是串联环路规划。即将工作区域划分为一个以上的环路分区,一个载具分配给一个环路分区,各个运行区域间设置传输转移点。由于将工作中心放置在制造设施中的不同位置,因此在运输中的工件需要多个载具,以便在串联环路中将工件从一个分区运输到目的工作分区。以此策略基础上,通过增加分区可以提升运输效率,并减少对分区间转移点的需求。然而缺点在于增加运输分区会增加空间和成本投入。
通过改进,将传统的串联环路策略分为非重叠的串联组合来规划串联路径系统,称为串联专区环路路径规划策略。通过配置专用载具为每个分区服务,即在一个分区中只允许一辆载具工作,并在相邻单环之间建立接口的附加传输点,可以达到更大的灵活性(图1)。在此改进策略下载具可以双向行驶,阻塞问题可完全消除。
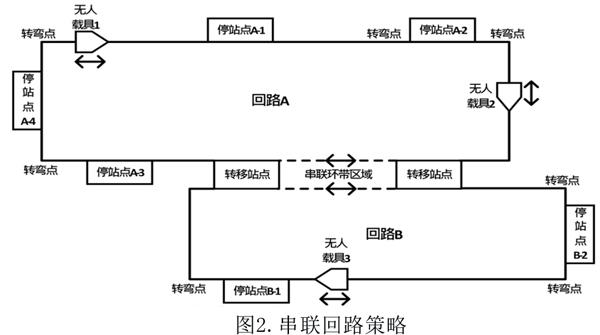
经过一系列模拟验证,以分析和比较系统中无人载具的性能参数(平均迟滞百分比,平均迟滞度,利用率和平均流动时间)的常规和串联策略。观察到串联路径策略的综合效率比常规路径策略更优。串联路径策略其优势在于更易于调度控制,且有效避免拥塞和死锁。劣势在于串联路径策略对系统故障的容忍度较低,并且系统的吞吐量随着传输缓冲区的额外要求而降低,处理时间增加。在串联环路策略的设计上,可以通过:1.解决旅行推销员问题(TravellingSalesmanProblem)以划分工作中心的子集。2.应用马尔可夫链模型找出工,作中心的最终子集。在进一步的改进中,提出了基于混合算法优化的串联回路策略,通过设计一个串联环带区域防止载具在交叉路径发生死锁(图2)。
通过对三种串联路径规划策略的性能参数的比较,研究在不同规模设施下的总行驶时间和载具空载的比例。通过离散仿真运行,计算三种串联路径策略对空载行驶时间值之比的影响,串联回路路径策略表现最佳。
2路径规划策略性能分析
3结论
在以上文章中分析,无人载具的路径规划策略是在任何设施中进行有效物料搬运操作的最重要因素之一。即通过不同类型的路径规划策略的设计和实施,对设施中无人载具的最佳规模进行估算,对调度有效运行规则进行分析,以最佳利用路径策略满足设施中的搬运要求。
路径规划策略可分为常规单向/双向、单环、串联环路、串联专区环路和串联回路等。通过几项参数的对比发现,每种策略的处理方式都是唯一的,其对于特定的制造环境具有其特定的应用。实践中可根据需求采用单个或多个策略的组合提供的最佳解决方案。
参考文献:
[1]V.K.Chawla1,A.K.Chanda,andSurjitAngra.Automaticguidedvehiclesystemsintheflexiblemanufacturingsystem-Areview[J].InternationalJournalofIndustrialEngineering,26(5),737-765,2019
[2]Mantel,R.J.andLandeweerd,H.R.A.(1995).DesignandoperationalcontrolofanAGVsystem[J].InternationalJournalofProductionEconomics,41(1-3):257-266.
[3]Ko,K.C.,&Egbelu,P.J.(2003).UnidirectionalAGVguidepathnetworkdesign:aheuristicalgorithm[J].InternationalJournalofProductionResearch,41(10):2325-2343.
[4]Hamzeei,M.,Farahani,R.Z.,&Rashidi-Bejgan,H.(2013).AnexactandasimulatedannealingalgorithmforsimultaneouslydeterminingflowpathandthelocationofP/Dstationsinbidirectionalpath[J].JournalofManufacturingSystems,32(4):648-654.
[5]Asef-Vaziri,A.,&Goetschalckx,M.(2008).DualtrackandsegmentedsingletrackbidirectionalloopguidepathlayoutforAGVsystems[J].EuropeanJournalofOperationalResearch,186(3):972-989
[6]Kim,K.S.,&DoChung,B.(2007).DesignforatandemAGVsystemwithtwo-loadAGVs[J].Computers&IndustrialEngineering,53(2):247-251.
[7]Al-Hawari,T.,Ena'amS,A.Z.,&Alshraideh,H.(2016).StudyingtheEffectofFacilitySizeontheSelectionofAutomatedGuidedVehicleFlowConfigurations[J].JournalofAutomationandControlEngineering,4(2):132-139
作者簡介:林蔚(1986-),男,硕士,工程师,主要从事工业互联网生态系统建设及工业无人载具系统研究。
