轮式甘蔗装载机应用
2020-10-13 00:24李选朋曹西洋洪学领叶江华
湖北农机化 2020年15期
李选朋 曹西洋 洪学领 叶江华
(1.大连理工大学(徐州)工程机械研究中心,辽宁 大连 116000;2.徐州市源能进出口贸易有限公司,江苏 徐州 221000)
轮式甘蔗装载机是一种抓举举升类设备,整机在行走过程中,通过前端链接的推铲将砍倒散落在地的甘蔗聚拢成堆,安装在臂架前端的钳爪闭合抓住聚拢成堆的甘蔗,臂架变幅油缸伸出带动臂架和钳爪绕其铰点旋转并举高,回转油缸伸缩带动回转体与之相连接的臂架,将举升的甘蔗旋转到车体的一侧,并将其放置在甘蔗机一侧运输车辆的箱体内。该设备能够在甘蔗田地里自由行走,具有通过性能高,行动灵敏,转向灵活,装卸效率高等特点,可满足不同型号运输车的装卸要求,主要应用于甘蔗种植农场以及制糖厂等场所。
1 主要技术参数
整车尺寸运输(m)6.5×2.4×2.8
最大举升高度(m) 6.3
最大回转角度(°) 90
轴距(m×m) 3.0
整机最大爬坡角度(°) 25
行走速度(m/h) 9~32
整机重量(t) 7.2
2 主要系统构成
2.1 车架
车架是由板材零部件和型材焊接而成,整机主要的零部件都集中安装在车架上。车架底部前后端焊接有车桥连接部件,分别与前后车桥相连,前端横梁焊接有耳板与推铲相连接,横梁上面为驾驶室托架,安装驾驶室内部方向柱、脚踏板、座椅等控制功能原件,车架中间焊接矩形横梁,横梁部分链接回转装置,车架左侧安装液压油箱和配重,右侧安装燃油箱,尾部装安装动力单元部分和机罩。
2.2 推铲
推铲主要是由2块弧形钢板、圆管以及矩形管焊接而成,主要作用是整机在前行过程中把散落在田地里的甘蔗聚拢推成一堆,便于钳爪进行抓举。其分为工作状态和非工作状态:在工作状态下推铲油缸伸出使得推铲绕其与车架链接的铰点旋转下放,推铲前部的弧板与地面相接触,整机前行过程中推铲的弧板沿着地面向前将田地上散落的甘蔗慢慢收集聚成一个小堆停止前进,然后使用钳爪将聚集起来的甘蔗抓起来装到运输车上,整车开始继续前行直至再聚成下一个小堆;非工作状态下推铲油缸回缩带动推铲绕其链接铰旋转上扬远离地面,便于在田间行走、掉头或者是转场。
2.3 回转装置
回转装置主要由回转油缸和回转总成2部分组成。回转油缸由2根油缸组成分别布置在回转体的2侧,一端固定在车架上,一端与回转装置的回转体连接,2个回转油缸通过一伸一缩的方式实现回转体的左右回转。回转总成由回转冒和回转体2部分组成,回转冒上焊接有一个长的回转轴,回转轴穿过回转体固定在车架上,回转体通过回转油缸伸缩实现左右转动。
2.4 臂架系统
臂架系统主要采用型材和板材焊接的结构形式,主要由大臂、大臂油缸、中臂、中臂油缸、钳爪和钳爪油缸组成。它们之间用销轴连接的方式进行固定(图1)。臂架系统主要实现甘蔗抓举、举升以及侧方回转装卸功能。在工作过程中当推铲聚拢一堆甘蔗后,大臂油缸回缩,中臂油缸伸缩整个臂架部分下落回缩到指定位置后,钳爪油缸伸出使得张开的钳爪闭合,从而牢牢抓紧一堆甘蔗,然后大臂油缸外伸,中臂油缸回缩臂架举升到最大高度,回转装置向车体外侧旋转,带动整个臂架向车体侧方旋转,到达限定位置后,臂架开始下放,将钳爪所抓举的甘蔗放到运输车厢里,然后臂架举升,回转复位,重复下一轮的抓举装卸过程。
2.5 液压系统
整机采用全液压驱动的传动方式,液压系统包括闭式行走系统和臂架系统。
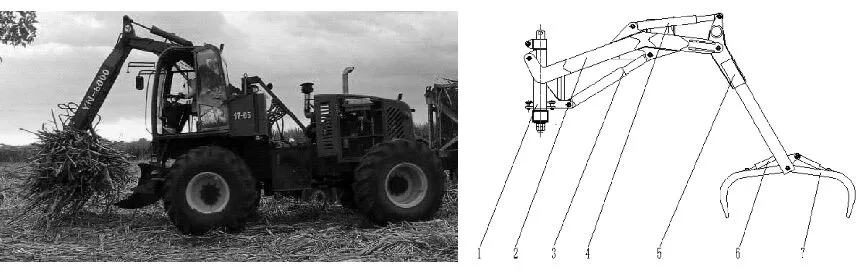
1.回转装置;2.大臂;3.大臂油缸;4.二臂油缸;5.中臂;6.钳爪油缸;7.钳爪图1 臂架系统
闭式行走系统主要由闭式柱塞泵、齿轮分动箱、电机、车桥等组成。闭式行走系统具有调速范围广、传动效率高、反应速度快、低速稳定好等特点。能够在作业工况下,快速实现前进后退挡位的切换,便于操作者根据情况进行高低速切换。
臂架系统主要由回转油缸、举升油缸和爪子油缸组成。该部分实现整个抓举和抓举装卸的全过程。
2.6 动力与电气系统
该机选用4BTA3.9-C100型康明斯发动机,额定功率83KW,额定转速为2200r/min,排放符合国家Ⅲ级标准,动力系统噪音指标符合相关国家规定,减少噪音对操作人员的伤害。
甘蔗装载机的电气系统包括:发动机状态检测与控制、液压系统控制、安全保护功能及报警4种功能。其中发动机状态检测主要是对发动机转速、机油温度、机油压力、燃油液位、发动机工作时间、进气堵塞等检测,并且通过钥匙开关控制发动机的启动和停止,当整机动作时,发动机会自动调节至高速;整机臂架油缸处安装行程开关,在各结构部件动作的极限位置做保护,使整机动作安全可靠;驾驶室安装有显示报警装置,方便观察显示器的读数,对各个等级的报警做显示。
3 结语
甘蔗装载机是一种在代替人力装卸甘蔗物料的设备,主要应用在东南亚甘蔗种植园。目前该产品已经成功出口到东南亚好几个国家,广受市场欢迎,其最大的特点操作方便、代替人工省时省力、维修方便。
猜你喜欢
液压与气动(2022年10期)2022-11-27
中国设备工程(2022年20期)2022-11-02
装备制造技术(2022年2期)2022-06-04
中国金属通报(2021年17期)2021-12-23
商品与质量(2020年35期)2020-11-06
电子制作(2019年19期)2019-11-23
科技风(2019年30期)2019-11-10
载人航天(2016年4期)2016-12-01
专用汽车(2016年7期)2016-11-23
中国高新技术企业(2016年4期)2016-11-19