
一种管道疏通蛇形机器人的关节研究
2020-10-10 20:43刘响响罗家维赵婧
机电信息 2020年27期
刘响响 罗家维 赵婧
摘要:各类管道和人们的生活生产密不可分,由于管道常用于输送腐蚀性液体或各类污水,人们对该类管道的堵塞处理非常困难。尤其是多数管道比较长、直径比较小,一旦发生堵塞,一般的疏通工具难以抵达堵塞部位。根据管道疏通现状,研制了一种用于狭窄管道的仿生蛇形机器人,该机器人根据蛇类形体特征和运动特点设计,能够更好地适应较细管道的疏通工作。
关键词:管道;堵塞;疏通;机器人
1 蛇形机器人运动类型与控制方案分析
生物蛇的运动分为直线爬行、蜿蜒前进、伸缩运动三种基本类型,结合下水管道的实际应用环境,蛇形机器人采用直线运动模式最为适合[1]。所谓“直线运动模式”是指蛇身体骨骼构造特殊,躯干部分骨骼仅存肋骨,肋骨之间通过一定的肌肉相连,通过肌肉的伸缩实现肋骨的前后运动,肋骨与贴地的腹鳞之间存在一定的肌肉关联,当肋骨和腹部鳞片之间的肌肉收缩时,肋骨即可向前移动,进而使腹部鳞片竖起,这样竖起的鳞片对地面有个斜向前的力的作用,此时,蛇身并没有向前运动,竖起的鳞片和收缩的腹部肌肉处于一种力学平衡中,蛇腹部肌肉放松时,这种平衡被打破,仅存鳞片对地面的作用力,这种力将推动蛇身体向前运动[2]。所有的肋骨依次做相应动作,即可完成蛇的直线爬行运动。在构造蛇形机器人结构模型时,主要完成肋骨的结构替换设计和骨环之间的肌肉替换仿真控制。
2 蛇形机器人的关节组成结构
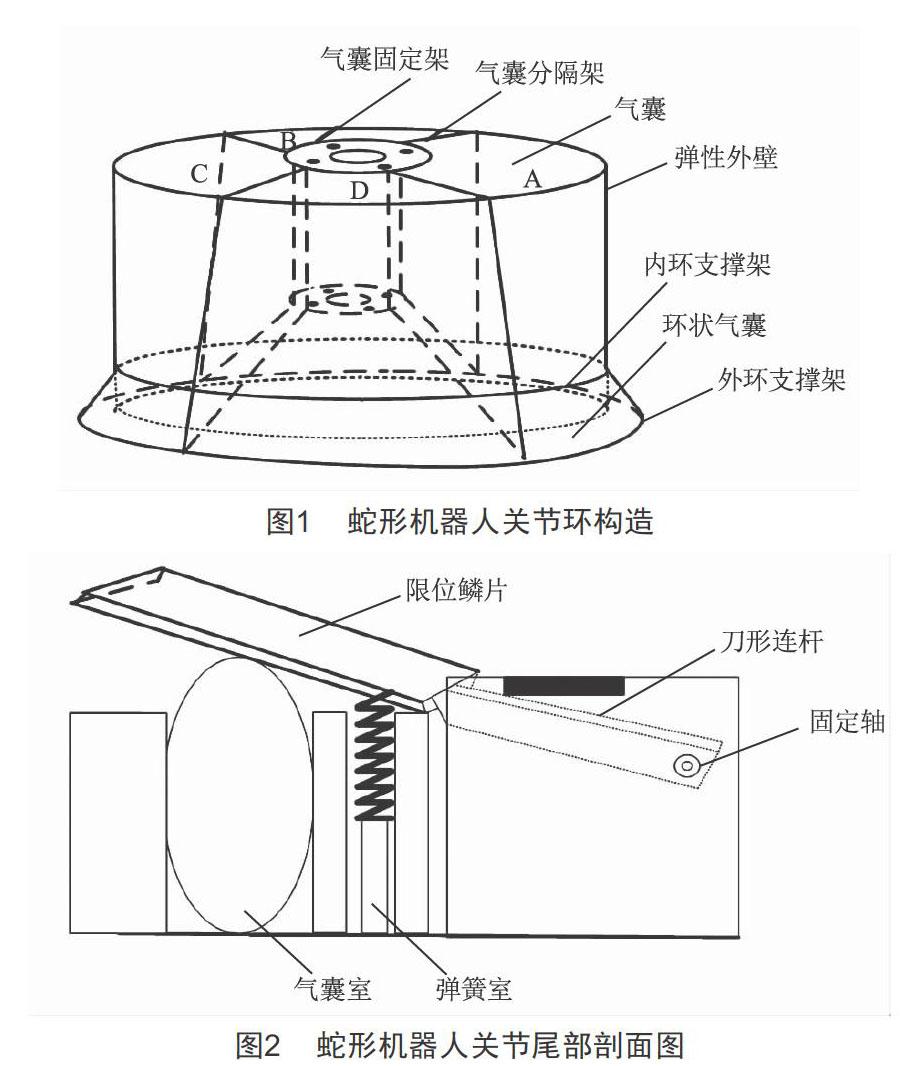
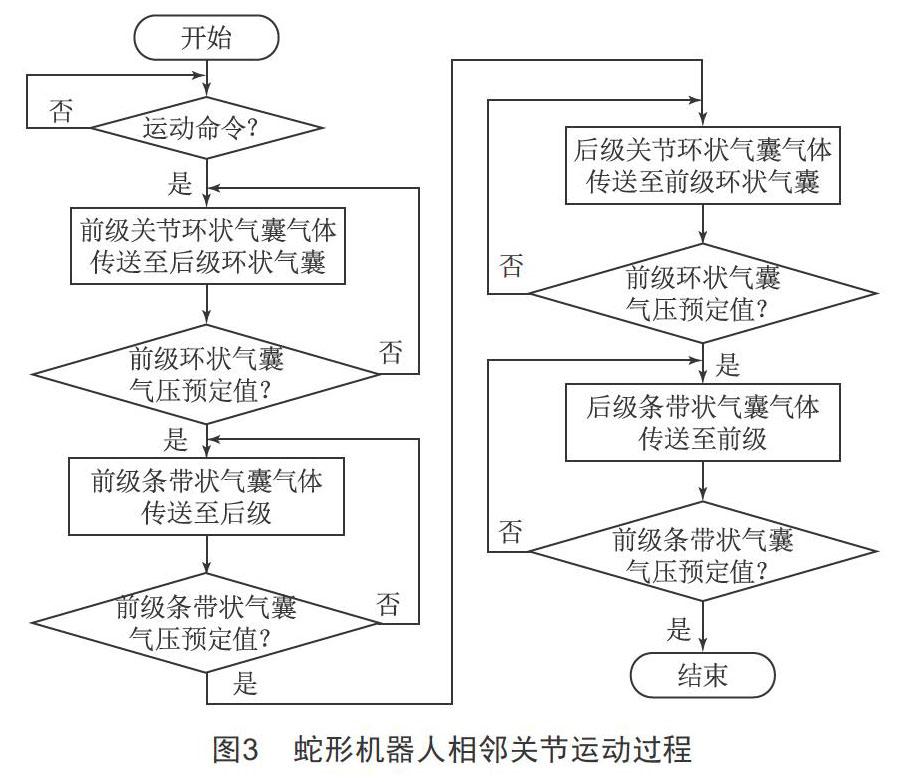
蛇形机器人躯干采用分段模块设计,仿照蛇类骨环设置相应的关节环,这种关节环设计结构如图1所示。该关节环采用气囊的结构模式,单个关节环设置四个条带状扇面气囊室(A、B、C、D),条带状气囊首尾两端固定在前后气囊固定架之上,并且气囊之间采用分割架进行限位隔离。条带状气囊由弹性外壁包裹,在关节环外部设置弹性外壁。每段关节末端设置一个环状气囊室,环状气囊室采用内外环固定支撑架固定,内环支撑架直径小于外环支撑架。环状气囊室外壁由弹性材料构成,在弹性材料上安装防后移装置,如图2所示。防后移装置主要由限位鳞片、刀形连杆、弹簧室、环形气囊室组成,当该关节的环形气囊室气体充气后,环形气囊室支撑类似鱼鳞片形的防位移限位鳞片,防止蛇形机器人关节向后移动,当气囊失气后,刀片状连杆在弹簧的拉力作用下使防位移鳞片紧贴蛇形机器人关节,此时蛇形机器人关节近似一个圆柱形。因此,后级气囊环起到位置固定作用。
3 蛇形机器人关节运动与控制系统研究
蛇类在直线运动过程中,通过调整骨环之间肌肉束的伸展和伸缩实现前进运动。蛇形机器人关节在运动过程中各部分的功能主要通过调整环状限位气囊的通气缩张和条带状扇面气囊室伸展和收缩实现,采用四个(A、B、C、D)条带状气囊,蛇形机器人关节横截面显示各条带状气囊呈扇面状。蛇形机器人主要由多级关节机构串联组成,相邻关节间通过关节固定架上的法兰盘固定在一起,仿照蛇类骨环肌肉动作完成仿生动作,在前进运动过程中采用多级协作模式。首先是前级关节环状气囊室中的气体转移到后级关节环状气囊室中,在该模式下,后级环状限位气囊(所谓“限位气囊”,主要通过该机构与接触面的压力,阻碍蛇形机器人身体在运动过程中向后移位)膨胀,使后级关节的重力中相当一部分作用在后级关节的气囊环之上,同时,前级关节环状气囊室因为失去气体支撑,整个前级关节贴地重心也随之下降。其次,前级关节四个条带状扇面气囊中的气体通过气体泵经过相应的微型管道转移至后级关节相应的气囊室中;在气体转移过程中,后级气囊产生自然的前后伸展(气囊侧向伸缩受到关节外罩的束缚作用,限制横向缩张作用),又因为受到后级环状限位气囊的限制作用,后级条带状扇面氣囊做前伸运动,推动前级关节向前移动。当该动作完成时,后级环状气囊室中的气体再次转移到前级环状气囊室,然后后级关节条带状扇面气囊中的气体再次转移到前级关节条带状扇面气囊中,后级关节气囊收缩,拉动后级关节前移。按照这种模式不断循环,蛇形关节依次向前移动,实现整个机器人的前进运动。
蛇形机器人关节运动控制过程如图3所示。
蛇形机器人前后关节中的条带状扇面气囊室之间的气体转移采用气体导管经过微型气泵抽送完成。在气体抽送过程中,通过安装在各类气囊上的压力传感器对相应的气囊内的气压进行判断,由气压变化完成气囊是否实现气体抽送任务的判断。例如,条带状扇面气囊的气体压力值传感器达到压力值101.325 kPa,即表示该气囊室处于完全伸展状态;否则即处于收缩状态。按照需要完成对不同气囊间的气体抽送,实现蛇形机器人关节的伸缩控制,最终实现蛇形机器人的运动控制。
4 结语
经过论证,该结构设计可采用较轻质材料完成,降低蛇形机器人自身重量,减轻机器人移动过程中的能量损耗。整个结构体组成较为简单,关节模块化程度较高,易于生产与组装,因而具备一定的实用性和可靠性。
[参考文献]
[1] 邬昭平,刘许童.一种基于真空吸入式气力输送技术的大管道疏通设备研发[J].科技资讯,2016,14(18):41-42.
[2] 琚立颖,龙海洋,李耀刚.自主式微型管道疏通车疏通驱动系统研究[J].机床与液压,2016,44(8):75-77.
收稿日期:2020-08-25
作者简介:刘响响(1989—),男,安徽人,硕士,研究方向:智能控制。
猜你喜欢
环球时报(2019-12-03)2019-12-03
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
琴童(2016年8期)2016-05-14
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
能源(2014年3期)2014-03-27
环球时报(2009-09-09)2009-09-09
