TBL理论下3C产品可持续闭环物流网络模糊优化
2020-10-10 01:00霍晴晴郭健全
计算机工程与应用 2020年19期
霍晴晴,郭健全
上海理工大学 管理学院,上海200093
1 引言
电子类产品全球消费增加的趋势及其本身寿命的缩短,使得废弃电子设备的回收和处理问题日益受到关注[1]。2018 年,3C 产品(含通信产品、消费类电子产品)销量占电子设备消费市场的59%,成为全球电子设备消费品市场的主要贡献者[2],回收和循环利用废弃3C产品的问题亟待解决[3]。闭环物流是正向物流和逆向物流的集成,设计合理的闭环物流网络可有效回收废弃产品[4]。Miao等[5]通过分析收集点覆盖面积对于回收率的影响,构建了第三方主导的闭环物流网络模型;李晓静等[6]从闭环供应链的角度出发,研究在不同的供应链结构下,制造商对于回收模式选择的影响因素;卢荣花等[7]研究了零售商环境下闭环供应链回收渠道选择的影响因素。以上研究尚未探讨3C产品的闭环物流网络模型设计,也未考虑闭环物流网络的可持续性。
随着社会对可持续发展的关注,建立可持续性闭环物流网络是研究人员和实践者面临的一个重要问题[8]。严南南等[9]在低碳视角下兼顾成本最小化,对汽车产业逆向物流节点设施选址问题进行建模,并通过实证分析验证了模型的有效性;Sushmita 等[10]将经济成本、环境成本纳入旨在通过区域合作实现可持续性的模式中,研究了印度制药业的可持续性;Navid 等[11]考虑经济和环境目标,研究了家电行业可持续性闭环物流网络。TBL(三重底线理论)理论扩展了可持续的目标,该理论认为经济责任、社会责任和环境责任是企业可持续发展中应当履行的基本责任,仅从经济和环境保护角度思考是不够的,有必要考虑社会影响[12-13]。Ioannis 等[14]根据TBL理论制定了衡量逆向物流社会责任绩效的指标框架。Meyer 等[15]设计供应链时考虑社会维度,分析了阿根廷东北部地区林业实施可持续性闭环物流的可行性。以上研究尚未从整体上构建可持续性闭环物流网络模型,且未考虑到闭环物流网络中的不确定性。
闭环物流网络中,处于逆向物流过程的产品数量往往是模糊的,考虑不确定因素能更好的解决现实问题。Kim 等[16]运用鲁棒优化建立了服装行业的闭环供应链模型,研究了产品回收量和客户需求的不确定性;Yu等[17]运用随机规划解决了回收量和再制造价格不确定条件下的双目标混合整数规划问题;鲁棒优化采用事先制定情景数的方法,虽然具有一定的稳定性但降低了模型的适用性[18];随机规划需要足够的历史数据估计不确定参数的精确分布情况,对企业实际运作挑战较大[19]。
模糊规划因其能更好的处理主观与客观共存的非精确数据而被广泛应用[20-21]。Mohanty 等[22]提出了一种模糊决策分析模型,并运用模糊优化方法求解以加强不确定环境下综合物流的可持续性。Djordjevic等[23]建立汽车行业模糊优化模型,利用模糊规划解决客户需求的不确定性。当前研究尚未考虑模糊优化在3C产品闭环物流网络中的应用,且未统筹闭环物流网络的最佳设施选址和最优车辆运输路径优化。
综上所述,本文根据TBL 理论分别以经济成本最小、环境影响最小、社会效益最大为目标函数,建立了3C产品可持续闭环物流网络模型。经济成本包含固定建设成本,运营成本和运输成本;环境影响包含碳排放及水和土壤污染;社会效益包含创造的工作岗位数量与为员工提供的技能培训时长。考虑到3C产品回收量的不确定性,将回收量看成三角模糊数,利用模糊机会约束规划方法实现约束条件清晰化。以上海市3C产品闭环物流网络为例,通过GA分别进行单目标与模糊多目标求解,在此基础上,规划出最佳设施选址和最优车辆运输路径。通过对比分析计算结果,验证了模型的有效性。以上文献与本文的对比情况如表1所示。

表1 文献总结
2 3C产品可持续闭环物流网络模型
2.1 3C产品闭环物流网络结构
3C产品闭环物流网络结构如图1所示,主要由供应商、工厂、零售点、顾客、分拆检测中心、再制造中心、处理中心7部分组成。
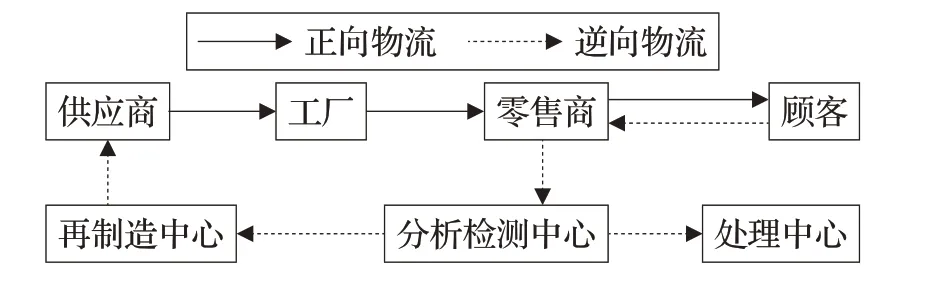
图1 3C产品闭环物流网络结构
在正向物流中,供应商将零部件配送至工厂,工厂将零部件制成产品运送至零售点,顾客至零售点处购买3C产品。
在逆向物流中,顾客将废旧3C 产品送至零售点处统一收集,零售点将收集的一定数量的废旧3C 产品运往分拆检测中心;分拆检测中心根据检测情况,将无使用价值的部分运往处理中心集中处理,有重复使用价值的零部件分拆后运往再制造中心;再制造中心将翻新的零部件运往供应商实现循环使用。
2.2 模糊多目标模型
2.2.1 模型假设
(1)工厂、分拆检测中心、再制造中心分为高、低两种技术类型,分别以1、2来表示。
(2)供应商、工厂、零售点、分拆检测中心、再制造中心、处理中心的候选位置与数量已知。
(3)各节点之间的运输成本与运输距离和运输量成正比。
(4)顾客在零售点购买新产品,与此同时,将废旧3C产品送往就近零售点处回收。
(5)节点之间的距离并非两点间直线距离,而是货车行驶距离。
(6)CO2排放量与货车运输距离和运输量成正比。
(7)水污染、土壤污染与处理不当的量成正比。
2.2.2 符号
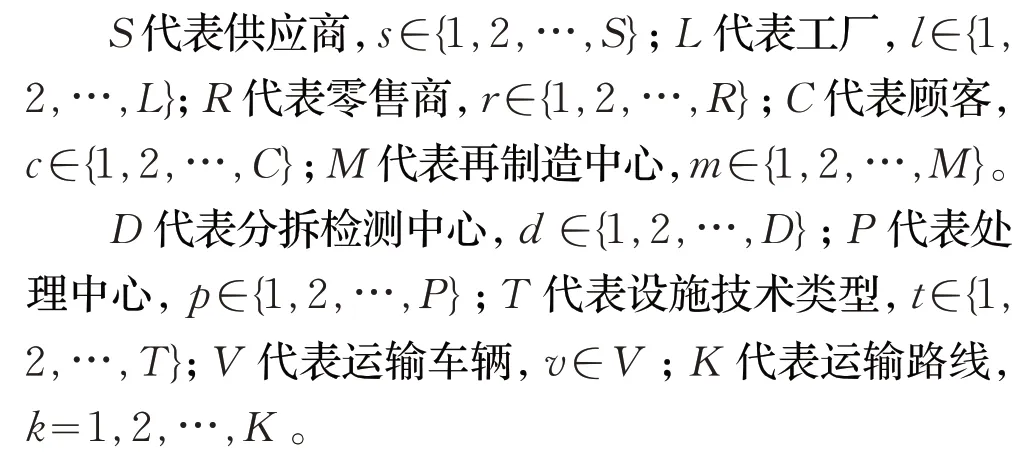
2.2.3 参数
2.2.4 决策变量
Yl为0-1 变量,若选择候选工厂,则Yl=1,否则为0;Yr为0-1 变量,若选择候选零售点,则Yr=1,否则为0;Yd为0-1变量,若选择候选分拆检测中心,则Yd=1,否则为0;Ym为0-1 变量,若选择候选再制造中心,则Ym=1,否则为0;为0-1 变量,若车辆V 在第k 条路线运输,则=1,否则为0;,,,,,为0-1变量,若车辆在两节点运输时选择第K条路线Y为1,否则为0。
2.2.5 数学模型的建立

式(1)表示3C产品闭环物流网络的总经济成本,包括网点建设成本、运营成本及物流过程中的运输成本。
式(2)表示3C产品闭环物流网络的环境影响,环境目标的设定考虑到了闭环物流网络运输过程中产生的CO2排放量[24],以及收集产品的正面环境影响。CO2排放水平根据车辆行驶路程与运载量确定,正面影响主要包括因回收而避免的不当处理所可能产生的水污染、土壤污染。
式(3)表示3C产品闭环物流网络产生的社会效益。Arampantzi等[25]将社会因素分为五类:需求满意、资源公平、就业机会、区域发展,以及该地点的安全级别和医疗设施准入级别。由于电子废弃物回收量的多变性在某一时期可能导致裁员,对企业和政府来说,保持一定的劳动力水平是很重要的。政府不希望劳动力水平下降,企业不希望因裁员而支付补偿[26],因此本文将为员工提供的工作机会与通过培训提高员工技能作为社会目标的指标。
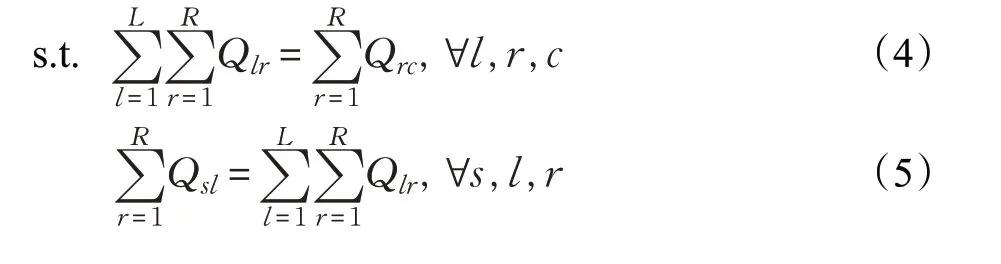
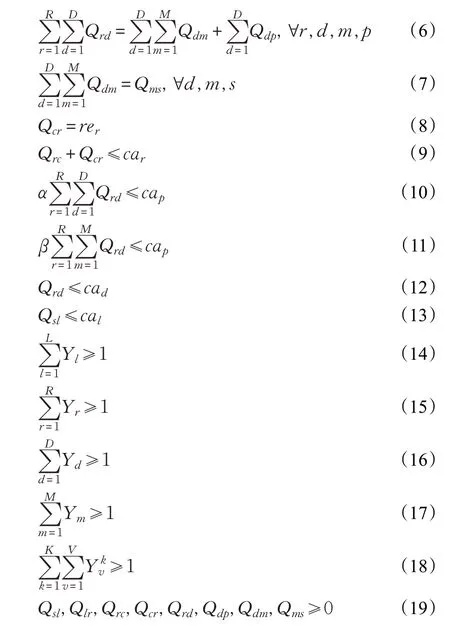
式(4)~(8)表示流量均衡约束,式(9)~(13)表示容量约束,式(14)~(17)表示至少选择一个工厂、零售点、分拆检测中心、再制造中心,式(18)表示至少有一辆车完成整个物流网络的运输,式(19)表示运输量非负。
3 模型求解
3.1 模糊机会约束清晰化
3C产品闭环物流网络中回收量rer为模糊参数,因此本文求解的不再是约束条件清晰的规划问题。对于类似的物流网络模糊规划问题,宜采用模糊机会约束规划方法[27]。首先将回收量看作三角模糊参数,其次应保证约束条件成立概率控制在决策者制定的置信水平之上,通过对模糊对应式进行等价变换,使模型的约束条件转化为等价的清晰约束[28]。
综上所述,在整个施工项目的施工过程中进行相应的现场施工管理具有重要意义。对于市政工程企业的稳定,长期,高效发展来说,有必要加强对施工技术的管理。因此,提高建设项目的施工质量和确保项目按时完成,鼓励市政工程公司取得更多的经济效益,必须实现“经济,社会和环境”的和谐统一发展。
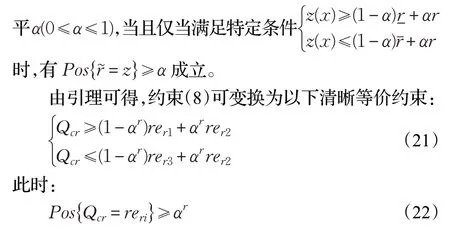
将rer看作三角模糊数,记rer=(rer1,rer2,rer3)其中rer1,rer3分别为3C 产品企业给定的置信区间上下界,rer2为最可能值。其模糊隶属函数如下表示:

根据FCCP(模糊机会约束规划)的清晰化定义[29],可以推导出以下引理:
设三角模糊数r 为(r,r,r),则对任意给定的置信水
3.2 多目标的模糊化处理
在多目标优化问题中,多目标最优解应该包含各子目标的贡献,然而子目标间往往存在冲突,由于模糊多目标规划能针对多个相互冲突的目标提供多种决策方案且具有灵活性而被广泛应用[30]。各子目标最优解与多目标最优解之间的相互关系是模糊的,隶属度函数可以对模型中的多个子优化目标分别进行模糊化处理[31]。选择合适的隶属度函数是子优化目标模糊化的前提[32],参照文献[33]的做法,选择如下隶属度函数,令gv表示一类越大越优型目标函数,gs表示一类越小越优型目标函数,则隶属函数可表示为:
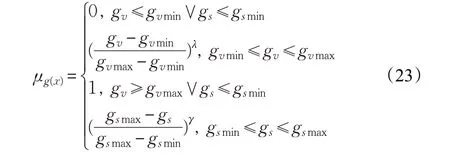
式中,μg(x)表示E 的隶属度函数,μ(0 ≤μ ≤1)的大小反映了优化结果的满意度,λ 和γ 分别表示形状系数,gvmin、gvmax和gsmin、gsmax分别表示gv和gs的最小值、最大值,λ,γ>0 且不为1。引入变量ζ ,将原目标函数转化为约束条件,即 μg(x)≥ξ(0 ≤ζ ≤1),则此时模型可转化为maxξ的单目标函数。根据上述原理,本研究所构建的多目标模型可表示为:maxξ。
此时约束条件除包括式(4)~(19),还包括:

求解思路为:先求出各子目标在所有约束条件下的最优解,再利用这些最优解将各子目标函数模糊化(即确定隶属度函数),然后使交集的隶属度函数取最大值,该解即为多目标问题的最优解。
3.3 基于遗传算法的模型求解
遗传算法(GA)是基于遗传学机理和达尔文自然选择理论的元启发式优化技术,适用于搜索近似最优解,被广泛应用于复杂系统的优化问题求解[32],本文拟采用GA来求解3C产品闭环物流网络的模糊多目标模型,从而规划多目标决策,具体说明如下所示。
(1)染色体编码与初始化:本文的染色体数组表示设施L,D,P,M,R是否建立,车辆V是否在路线K上运输,路线k上节点是否被选择,节点间的3C产品运输量。在GA 求解的过程中,自动确定设施是否开放,设备类型以及规划相应路线。
(2)适应度评估与选择:染色体的适应度反映了被选择概率。在满足约束条件的情况下,利用目标函数(1)、(2)、(3)计算各个个体的适应度值。适应度值可直观反映个体的优劣。选择操作避免遗漏,提高全局收敛性,采用轮盘赌策略进行选择。通过评估适应度值,选出适应度大的个体作为父代,提高全局收敛性。
(3)交叉与变异:交叉使子代同时继承父母代的基因,保持更高的适应性。变异使某个基因以一定的概率随机发生突变。交叉和变异不仅产生新个体,而且提高种群局部搜索能力。
(4)终止条件:若达到预先设定的最大进化代数,终止算法;否则转向步骤(2)。
4 算例
4.1 数据来源
本文以上海市3C 产品为研究对象,零售点选址以废弃3C产品回收需求出发,选取3个零售点,坐标为r1、r2、r3;候选的工厂分别编号为l1、l2;候选的分拆检测中心编号为d1、d2;候选的再制造中心编号为m1、m2;废物处理厂编号为p。模型中被选点以及候选点位置分布如图2 所示,各个节点间的距离由谷歌地图测量而得,具体数值如表2 所示。本文通过调研,整理得出废旧3C 产品回收量的模糊值,如表3 所示。其他参数数值见表4。

图2 被选点与候选点的位置分布图

表2 各相关节点间的距离 km

表3 零售点回收量的三角模糊数t
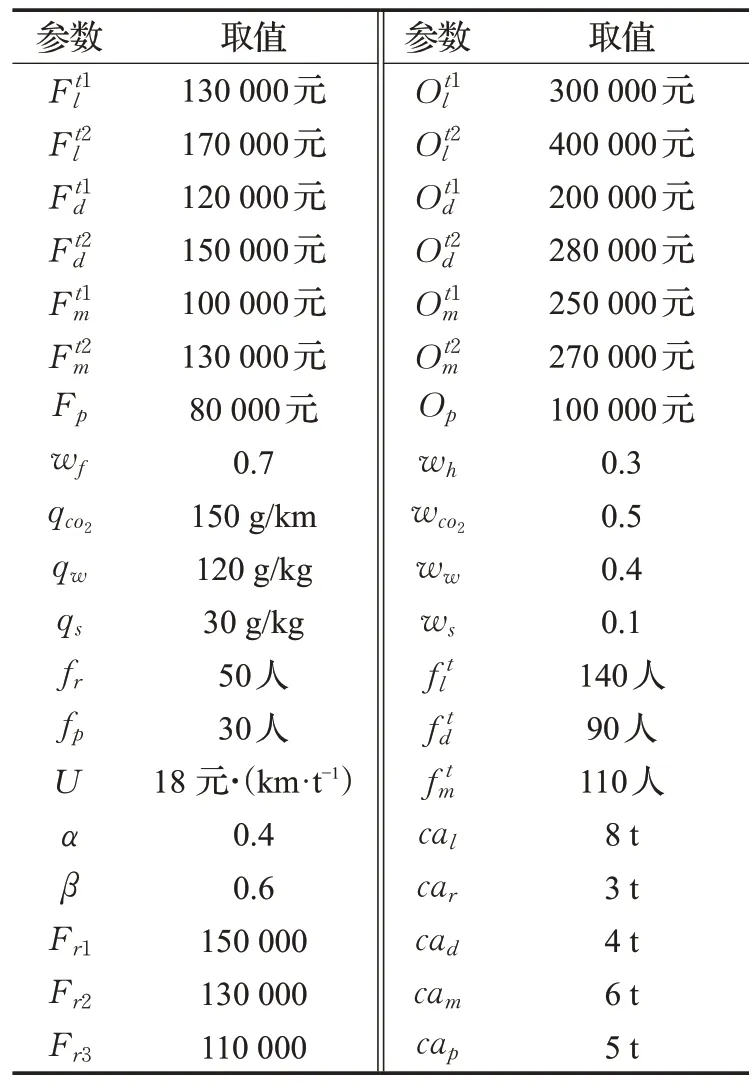
表4 其他相关参数数据
4.2 算例结果分析
为对模型子优化目标进行模糊化,首先需确定3C产品闭环物流网络的最小经济成本,最小环境影响,最大社会效益,即在仅考虑各子优化目标的情况下采用GA对模型求解,结果如图3和表5所示。

图3 单目标优化结果

表5 仅考虑各子目标时的优化结果
从图3 与表5 给出的结果可看出,若在规划中仅考虑3C 产品闭环物流网络的经济成本最小,则倾向于选择技术类型较低的设施点,此时经济成本达到理论上的最小值,为1 895 958元,然而此时闭环物流网络的环境影响将偏大,达到1 649;若仅考虑3C 产品闭环物流网络的环境影响最小,则倾向于选择开放距离较近的设施点,此时环境影响达到理论上的最小值,即1 237,然而此时社会效益显著下降,仅为223;若仅考虑3C 产品闭环物流网络的社会效益最大,则倾向于选择技术类型较高的设备点,此时社会效益达到理论最大值328,然而经济成本显著上升,达到2 673 850 元。因此规划模型的三个子优化目标在一定程度上互相冲突,很难同时达到最优。
在上述优化结果的基础上,可依据式(24)~(26)将优化模型中的子优化目标分别进行模糊化,并在此基础上将原始多目标问题转化为基于最大满意度的单目标优化问题。接着,采用GA对该单目标优化问题进行求解,优化中,各进化代数最优规划方案的满意度如图4所示,最终优化结果如图5和表6、7所示。

图4 算法收敛性

图5 模糊多目标优化结果

表6 最大满意度时的优化结果

表7 模糊优化与单目标优化结果对比图
由表6与表7可看出,在同时优化三个子目标时,各子目标与单目标优化相比均做出一定让步,但是与单目标优化的最劣项相比经济目标下降22%,环境目标下降18%,社会目标上升27%,三个子目标优化的满意度分别为0.92、0.90、0.96,均不低于0.90,且整体优化的满意度达到最大值0.92。
5 总结与展望
本文以不确定条件下3C产品闭环物流网络可持续性为背景,基于TBL理论,以经济成本最小化,环境影响最小化,社会效益最大化为出发点,建立了3C产品闭环物流网络模糊多目标优化模型,规划出最佳设施选址和最优车辆运输路径。分别采用三角模糊函数和模糊优化处理不确定性及多目标冲突,在此基础上建立了基于最大满意度的单目标优化模型,并采用遗传算法求解。算例结果证明了本文所建模型及求解算法的有效性。
本文在以往研究的基础上考虑了3C产品回收量的不确定性以及社会效益,使得模型更符合现实意义。但是3C 产品闭环物流网络具有多种不确定性,下一步还可考虑回收质量、再制造价格等方面,且处理多目标的方法也是多样的,可以考虑多种处理方法(如ε约束法)的优化。
猜你喜欢
佳木斯大学学报(自然科学版)(2022年2期)2022-08-24
中国交通信息化(2020年4期)2021-01-14
电子技术与软件工程(2020年18期)2020-02-02
中国特种设备安全(2019年9期)2019-12-03
中国惯性技术学报(2019年3期)2019-10-15
物流技术与应用(2019年8期)2019-09-04
汽车观察(2018年12期)2018-12-26
系统工程与电子技术(2018年12期)2018-12-10
消费导刊(2018年8期)2018-05-25
物理教学探讨(2015年7期)2015-08-05