
基于CANopen协议的喷漆机器人控制系统研究
2020-10-10 01:02孙立新
制造业自动化 2020年9期
孙立新,陈 帮
(河北工业大学 机械工程学院,天津 300131)
0 引言
大型储罐长期使用后会出现罐壁腐蚀、表面脱落的现象,当表漆脱落严重时需将罐体表面原漆去除,并重新喷漆。传统大型罐体喷漆需搭建脚手架进行人工喷漆,搭建脚手架时,防止出现事故,所有相关设备需停止运行;并且搭建脚手架耗费很长时间,这将严重影响企业生产[1]。人工喷漆危险系数高,工作量大,对身体危害严重。
若研究设计一种喷漆爬壁机器人,它将取代人工喷漆,缓解工人工作强度;无需搭建脚手架,极大的提高企业生产效率。本文通过CANopen协议研究喷漆机器人的控制系统。
1 喷漆机器人工作原理
本文介绍的喷漆机器人如图1所示。
在车体下面装有磁铁,通过磁吸附在罐体壁面。喷枪放在喷枪支架上,用来进行喷漆操作,喷枪在图中未显示。推杆伸缩可实现喷枪支架的升降,滑台电机实现喷枪支架在滑台上来回移动,达到调整喷枪位置的目的。左右轮为主动轮,其速度大小相同,后轮为万向轮。根据左右轮转向情况不同,实现车体的前进、后退、顺时针转、逆时针转。图中盒子里面装的是三个交流伺服驱动器,用以控制三个伺服电机。两个激光传感器朝向地面发射,根据其测量数值的差异实现车体的纠偏。
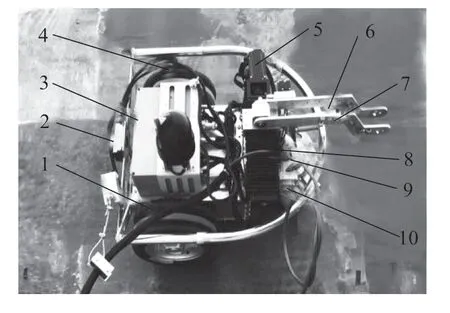
图1 喷漆机器人
2 控制系统架构
喷漆机器人控制系统架构如图2所示。
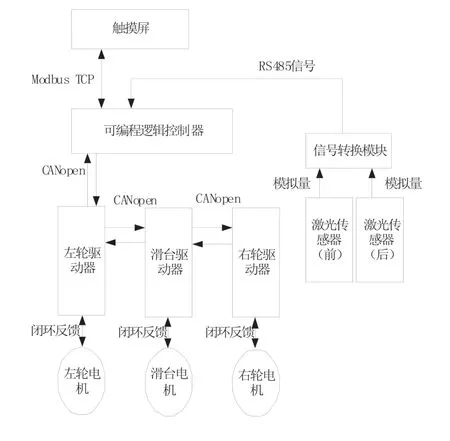
图2 控制系统结构图
可编程控制器(PLC)通过CAN线与左轮驱动器、滑台驱动器和右轮驱动器相互通信;驱动器根据伺服电机上编码器的反馈信息控制电机;激光传感器输出模拟量信号经过信号转换模块转换成RS485信号,通过PLC自带的RS485接口,将信号传递给PLC;触摸屏采用Modbus TCP协议与PLC通讯。操作触摸屏就可以控制喷漆机器人动作。
系统采用的可编程控制器为施耐德PLC,型号TM241CECT/U,既能漏型输出,也可以源型输出,有一个CANopen主端口,与三个驱动器形成CAN网络,驱动器间接线原理如图3所示,只需接CAN_H和CAN_L两根双绞线;一个以太网口,用来和触摸屏通讯;两个串行通信口,一个为RS485接口,与信号转换模块相连,另一个通信口既可以是RS485接口,也可以当作RS232接口;一个USB编程端口,与电脑连接,通过编程软件对PLC程序的编写与修改。三个驱动器为Copley公司的交流伺服驱动器,型号Xenus R10。触摸屏为威纶通MT8071iE,有一个以太网口与PLC通讯。

图3 CAN接线图
3 设备通讯
3.1 PLC与信号转换模块间通讯
PLC与信号转换模块通过RS485进行通讯,施耐德PLC编程软件为Somachine。如图4所示,将PLC设为主站,传输模式为Modbus RTU,设置波特率为115200。信号转换模块设置为从站,其他参数要和PLC设置相同,不然相互通讯不了,它有8路模拟量输入,两个激光传感器占前两路[2]。PLC需给模块发送一组基于Modbus协议的数据,这组数据有8个字节为01 03 00 00 00 02 C4 0B,01表示模块的地址,03代表读数据,00 00为要读数据的首地址,00 02表示要读两路模拟量的数据,C4 0B是两个校验位;模块返回去的一组数为01 03 04 byte1 byte2 byte3 byte4 CRC1 CRC2。

图4 Modbus通讯配置
3.2 PLC与驱动器间通讯
1)CANopen原理
CANopen是一种架构在控制局域网(CAN)上的高层通讯协定,是工业控制常用的一种现场总线。对象字典(OD)为其中最为核心的概念,OD是一个有序的对象组,描述了对应节点的所有参数,使用电子数据表(EDS文件)来记录这些参数,每个对象采用一个16位的索引值来寻址。CANopen采用服务数据对象(SDO)和过程数据对象(PDO)两种途径来访问对象字典。
通讯对象(COB)是CAN网络上的一个传输单元,数据在COB内部沿着整个网络传输。通讯对象ID(COB-ID)有11位,其中4位表示功能码,功能码越小,消息的优越性越高;7位是节点地址,一个CANopen网络上最多允许127台设备。协议栈中定义4类通讯对象:SDO、PDO、网络管理报文(NMT)、特殊功能对象(包括同步报文SYNC、紧急报文EMCY等)。设备间的通讯模型分为主/从、客户机/服务器、生产者/消费者三种模型。
SDO主要用来对从站进行参数配置,其通信模型为客户机/服务器模型;PDO常用来传输对实时性要求比较高的场合,其通信模型为生产者/消费者模型,PDO的传输优先级高于SDO[3~5]。
2)CANopen运用
首先将Copley驱动器的EDS文件添加到PLC编程软件中,设置CAN总线波特率为250K,添加三个驱动器,站号分别为1,2,3,如图5所示,对应驱动器硬件的参数设置需同PLC设置一致。如此,PLC与驱动器即可通讯。Heartbeat生产时间设为200毫秒。
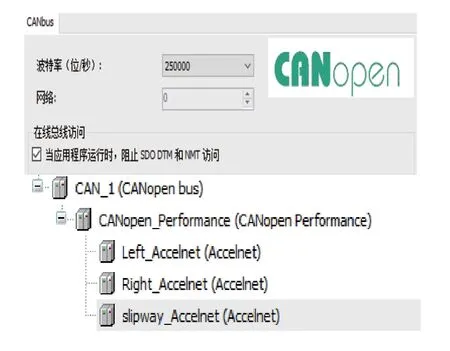
图5 CANopen通讯配置
配置P D O 参数,如图6 所示,每个节点允许8路PDO,4路接收PDO(RPDO),4路发送PDO(TPDO)。每路PDO最多64位,RPDO用来更新设备,TPDO用来从设备发送数据到网络,PDO传输类型有同步和异步两种方式。

图6 PDO配置
更改控制字(control word)的值可以改变电机轴的状态,当控制字的bit0、bit1、bit3都为TRUE时,电机处于使能状态;否则不处于使能状态。只有当电机轴处于使能状态时,才能进行工作,其有三种运行模式,分别为位置模式、速度模式和回零模式。
通过状态字(status word)知道电机轴当前状态,在TPDO中添加参数可以读取电机实时的脉冲数、速度和电流。
配置完PDO参数,在I/O映射表中可以实时监控,如图7所示。

图7 CANopen I/O映射表
SDO也可以访问对象字典,在索引中输入要访问参数的地址,通过“读SDO”、“写SDO”,对参数进行读写操作,如图8所示。
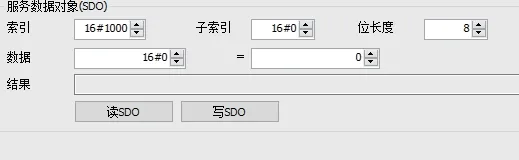
图8 SDO配置
最后编写程序,图9所示,实现喷漆机器人各种运动。
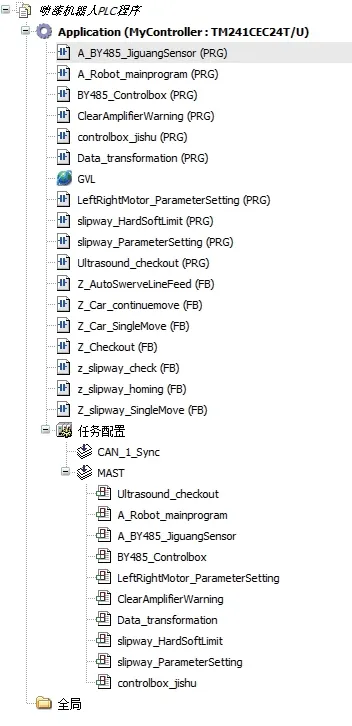
图9 喷漆机器人程序
4 车体位置校正
左右轮伺服电机编码器为2500线,4倍频,电机转一圈需要10000个脉冲,减速器减速比为100:1,电机转100圈,车轮转一圈,车轮直径为315毫米,所以车轮移动1毫米电机需要走a个脉冲。

图10为喷漆机器人位置校正原理图,实线表示车体实际位置,虚线表示车体校正后车体的位置。校正过程中,令右轮不动,左轮向后移动x毫米,这样就能起到校正的效果。经多次实验,校正后的车体倾斜角可以控制在0.3°以内。左右轮间距L1=455mm,两个激光传感器安装距离为L2=650mm,两激光传感器差值为Δy毫米,车体倾斜角度为θ角,由于θ角度较小,所以:

左轮电机需要顺时针走b个脉冲。

Δy可以通过两激光传感器测量出。
5 结语

图10 车体校正原理图
通过喷漆机器人在罐壁上大量实验,可知采用CANopen协议,数据传输稳定,系统响应时间短,并且接线简单,一对双绞线(CAN_H和CAN_L)上就可以接多个控制设备。喷漆厚度均匀,漆厚度符合要求。由于机器人是轮式,不适合在直径小的罐体上工作,否则车体会脱离罐体表面,造成严重后果。该机器人已在某公司应用,取代人工喷漆,不需搭脚手架,提高企业生产效率,有广泛的应用前景。
猜你喜欢
排灌机械工程学报(2022年12期)2023-01-02
资源节约与环保(2022年8期)2022-09-20
北华大学学报(自然科学版)(2021年3期)2021-07-13
能源工程(2021年1期)2021-04-13
电脑爱好者(2020年6期)2020-05-26
北京航空航天大学学报(2017年5期)2017-11-23
东西南北(2017年3期)2017-03-01
汽车维护与修理(2016年10期)2016-07-10
汽车维护与修理(2015年1期)2015-02-28
汽车维修与保养(2015年4期)2015-01-09
