
基于DCT的自适应巡航 低速控制策略的优化方法
2020-09-29 07:49李伟方维周友
汽车与驾驶维修(维修版) 2020年8期
李伟 方维 周友
摘要:本文首先介绍双离合器变速器(DCT)控制软件中的低速控制策略的基本逻辑,对离合器扭矩精准控制;其次针对自适应巡航(ACC)的低速工况,开发了以DCT扭矩请求为主的低速控制的优化方案,实现自动跟停、快速和平顺起步。最后针对当前项目,对优化控制策略进行了详细测试和评估,可满足平台需求,保证了其控制可行性。
关键词:双离合器自动变速器;自适应巡航系统;离合器控制;低速控制
中图分类号:U462文献标识码:A
0引言
自适应巡航系统的应用得到了广泛的认可和肯定,该系统功能在整车上涵盖的工况有定速巡航、跟车巡航以及特殊工况,而特殊工况是跟停、上坡、下坡、跟车和坡道跟车等低速起步工况,主要由蠕行工况和起步工况构成。而双离合器变速器控制(DCT)的难点之一,是车辆起步过程中对离合器传递扭矩的控制。为了保证快速、平稳起步,如何精准控制离合器扭矩成了关键。
本文研究了双离合器变速器在自适应巡航控制起步工况中,因双离合器特性引发的上坡抖动、溜坡等问题,确保车辆在不同环境下能够快速、平顺起步,实现了双离合器控制在自适应驾驶控制系统中的应用。
1自适应巡航系统方案
车身电子稳定系统加减速模块(ESPVLC)主要计算不同环境的车辆驱动力,很难考虑不同工况、环境下双离合器所带的拖曳扭矩、摩擦损失,所以本文先介绍双离合器变速器的自动巡航低速控制优化后的系统方案。该系统最主要优化自适应控制器(ACC)、车身电子稳定系统(ESP)、发动机控制系统(EMS)和变速器控制系统(TCU)。
(1)车身电子稳定系统:根据ACC获取加速度、减速度控制指令,对轮缸压力进行增压或减压的操作,同时通过VLC模块计算出整车在当前环境下所需的最小驱动力。该驱动力请求不再发送给发动机控制单元(EMS),而是通过减速指令、目标车速指令或整车所需最小驱动力值发送给TCU控制器,通过综合条件判断来决定提供车辆驾驶驱动力方式。
(2)变速器控制系统:根据ACC与ESP所发的控制指令,实现在不同环境、不同坡道的目标车速行驶,根据坡道或其他環境特征,判断是蠕行控制策略,还是带虚拟油门的起步控制逻辑,基于当前判断在原有的低速控制逻辑中增加最小驱动力的补偿。
(3)发动机控制系统:只需要根据TCU的发送控制指令,来实现原有蠕行策略的TCU\EMS扭矩交互模式以及新增的TCU起步增扭请求逻辑模拟油门,实现自适应巡航系统所需要的扭矩请求。
2双离合器起步工况分段控制
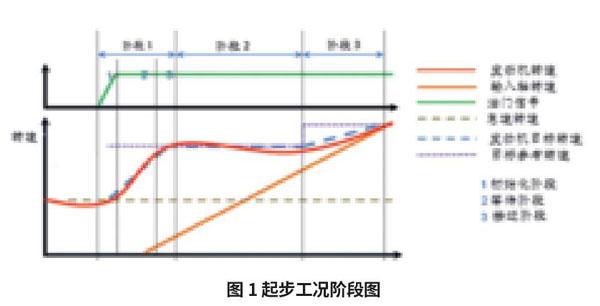
以发动机转速控制为目标的湿式离合器起步控制根据实际发动机转速分为3个不同的阶段状态。从图1中发动机转速变化趋势,分析各阶段变化。
阶段1:控制发动机转速迅速稳定上升到合适区域,保证发动机输出足够扭矩。
阶段2:通过平衡发动机扭矩和离合器扭矩,将发动机转速基本维持平稳,逐渐加速输入轴转速。
阶段3:当输入轴转速和发动机转速同步时,避免离合器接合过猛,输轴转速应该平顺地接近发动机转速。
起步控制是由于离合器的摩擦系数、加速踏板、发动机转速、发动机飞轮端扭矩及变速器油温不断的变化才导致难以控制[1]。因此,在起步策略中,离合器的目标扭矩在DCT起步控制中主要由2部分构成:PID计算、前馈项。PID依据发动机的实际转速和目标转速之差值采用闭环控制的方法计算相应的扭矩值[2],而前馈项FF则通过温度和油门踏板采用开环控制的方法计算获取扭矩值。所以阶段性的划分能够更针对性的进行相应标定。
在起步初期,为了保证发动机转速能够平稳地升速,并且防止前期压力跟不上的情况发生,其前馈项和PID的关系如下。
TComb=max(Ttgt,TFF)
针对PID的计算,在策略中使用如下公式。
Ttgt=Teng-TPID
其中,TComb代表离合器实际结合扭矩;Ttgt代表离合器目标扭矩;Teng代表发动机扭矩;TPID代表PID目标扭矩。
而在自适应巡航控制中,以上策略在不同坡道、不同路面联调时确存在很多性能问题,比如车辆扭矩不足抖动、起步顿挫、冲击、下拉发动机及加速度不线性等问题,原因在于ESP所计算的驱动力无法考虑离合器摩擦特性以及自身损失量。为了保证不改变原有起步策略的情况下,变速器控制器增加了扭矩请求控制,其关系如下。
TINC=TEsp+Tloss+Tslp
其中,TINC代表离合器请求扭矩;TEsp代表Esp基于当前环境所需最小驱动力;Tloss代表离合器自身滑磨损失扭矩;Tslp代表基于不同坡道所需修正扭矩。
通过TCU自身计算的TINC发送给EMS,EMS扭矩计算模块接受到TCU的请求扭矩后,经过pedalmap反算出所需要执行的虚拟油门和实际扭矩反馈给TCU控制器。TCU根据接受到的这些信息,再次执行自身的起步控制,形成一个闭环控制。经过实车验证,以TCU扭矩请求来控制离合器起步的控制策略,在配有湿式双离合器的车辆自适应巡航系统中可以发挥很好的作用,使得车辆起步响应快速、平稳。
3双离合器蠕行工况控制
蠕行工况为正常不踩油门起步,车辆是从静止到平顺起步,最后到稳定的蠕行车速[3]。为了维持稳定的车速,主要采用的变速器离合器自身控制和发动机自身怠速调节共同但又独立实现的,其过程主要分为3个阶段。
阶段1:采用开环控制,主要为了快速建立离合器压,加快车速响应。
阶段2:采用前馈加闭环控制调节离合器大小,让离合器实际转速快速接近目标车速。
阶段3:采用闭环控制让离合器实际转速稳定在目标转速,让车辆速度平稳行驶。
此外,变速器自身会向发动机发送怠速请求、扭矩补偿以及变速器摩擦损失值,发动机会根据这3个调节来控制相关的自身怠速量[4]。而车身稳定系统的请求扭矩,很难平衡两者的联系,采用变速器自身扭矩请求的方式,能够很好地解决低速跟车难、起步不平顺抖动等问题。所以针对该工况,在ACC巡航中做了以下几点控制策略优化。
(1)优化策略触发条件:车身稳定系统的驱动力小于变速器自身请求的扭矩补偿量或坡道小于某个标定量值。
(2)优化扭矩补偿条件:基于不同坡道结合当前车身稳定系统的驱动力条件做相关补偿。
(3)优化维持车速稳定扭矩:维持车速稳定的最小扭矩值,将其变更为基于不同坡道做相关标定。
4ACC低速控制的实测分析
前文已提到低速控制中的2种工况:蠕行工况和起步工况,介绍了2种工况对于车身稳定系统中因离合器特性所带来的问题以及优化策略。为了确保其正确性,对优化前的实车问题数据做分析。
首先,对蠕行工况性能进行相关采集。通过数据可以很明显看到,发动机转速存在严重下拉。原因在于车身稳定系统请求扭矩不足,发动机自身控制的怠速响应不了其扭矩补偿,影响了在原有策略中离合器自身扭矩补偿的功能。这使得自适应巡航系统在低速控制下的驾驶性很难标定,可控性不高。
其次,对起步工况也进行了采集,发现其加速变化不线性。原因在于离合器滑磨损失量、静摩擦转动摩擦过程的变化量,车身稳定系统无法考虑,只能由变速器控制系统来处理,使得起步工况的线性加速非常难处理。
优化策略也做了相同工况的数据采集。经过测试发现,结果满足预期目标,能够有效防止发动机转速下拉,同时也使得发动机的扭矩稳定在正常值范围内,不再偏高或偏低。但是存在以下2个问题。
(1)对两工况还存在频繁切换的问题,通过不同坡道的尝试测试,增加蠕行工况的触发条件优化后,坡道标定值为7%的条件。(2)自适应巡航系统的跟停工况不适合大坡,因为没有坡道保持功能的存在,压力退出延迟;同时动力响应需要一点时间,导致容易触发该系统溜坡退出的条件。因此在变速器低速控制中,
增加坡道大于20%触发抑制其功能的条件。通过理论分析和实测结果,新增的策略不仅减小了车身稳定
系统中请求不足或过高的因素,也规避了原策略低速控制中两工况因车身控制引起的界限不明而频繁切换的问题,使得低速起步性能在不同环境不同坡道下更加可控、可靠,性能更加快速、平顺。
5结束语
湿式离合器起步控制是一种复杂的非线性控制过程,而自适应巡航低速起步面临不同环境不同坡道的情况下更为复杂。通过本文的相关工作,对DCT低速起步控制策略进行优化,实车测试数据表明,本文描述的優化控制逻辑具有有效性和可行性。基于扭矩请求接口与PID共同的调节性使得DCT低速起步控制策略更可控,调试起来更为方便,也降低了与正常起步之间的差异性,更好的满足了DCT低速起步的工程需求,使得起步工况方面的标定更为完善。
【参考文献】
[1]程秀生,冯巍,陆中华,等.湿式双离合器自动变速器起步控制[J].农业机械学报,2010,41(1):18-22.
[2]孔慧芳,周达,鲍伟,等.基于滑模变结构的DCT车辆双离合器起步控制研究[J].机械传动,2014(6):14-18.
[3]王传金,唐进元,李培军,等.双离合器自动变速器DCT的结构特点与工作原理分[J].机械传动,2008,32(6):94-97.
[4]胡亮,朱成,张友皇.湿式双离合器自动变速器的起步控制[J].汽车实用技术,2017,000(014):32-35.
