
机器人电气接插件可靠性加速实验系统设计
2020-09-29 09:23:14何利华
实验技术与管理 2020年2期
倪 敬,史 雨,何利华
(杭州电子科技大学 机械工程学院,浙江 杭州 310018)
1 工业机器人与电气接插件
随着智能制造行业的迅猛发展,工业机器人可靠性越来越受到国内外高等院校的重视[1-2]。工业机器人可靠性设计是一门理论性较强的专业性课程之一,课程实践性教学环节必不可少。
然而,当前机器人可靠性相关的教学实验平台还相对较少,在一定程度上限制了学生学习机器人可靠性设计相关课程的积极性和趣味性。因此,本文面向工业机器人可靠性设计课程对教学实验的迫切需要,设计了一种基于PLC 控制的工业机器人电气接插件服役可靠性加速实验系统。图1 为工业机器人与电气接插件。该系统以PLC 控制技术[3-5]和机电伺服传动控制技术[6]为基础,融合可靠性加速实验理论[7-9]、恒值温度PID 控制技术[10-12]、插拔力测试技术、接触电阻测量技术和显微观测技术等方面的知识,不仅可以开展大学生机电类专业基础性教学实验,还可以面向大学生或研究生开展与机器人可靠性设计相关的进阶型和高阶型实验。这对促进机器人可靠性设计知识的普及和拓展应用具有非常重要的意义。

图1 工业机器人与电气接插件
2 实验系统工作原理与性能指标
2.1 实验系统工作原理
工业机器人电气接插件可靠性加速实验系统的整体框架如图2 所示,主要由插拔驱动与负载感知系统、温度PID 控制系统和接插件性能评价系统组成。各部分具体工作原理如下所述:
(1)插拔驱动与负载感知系统工作原理。首先,PLC 通过高速输出接口向伺服驱动器发送正向指令脉冲;然后,伺服驱动器根据脉冲的频率和数量,驱动伺服电机拖动接插件公端(安装于同步带滑台上)以设定速度向固定不动的接插件母端运动,并最终完成插接动作;最后,PLC 向伺服驱动器发送反向指令脉冲,实现伺服电机拖动接插件公端从母端口的拔出分离动作,同时电气接插件公端和母端的插拔力由拉压传感器实时向PLC 反馈采集。
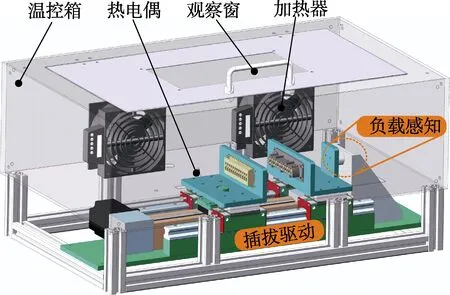
图2 实验系统图
(2)温度PID 控制系统工作原理。首先,PLC 在一个控制周期内,通过热电偶采集实时箱内温度y(t);然后,计算偏差值 e(t)=r(t)–y(t),r(t)为设定值;最后,根据式(1)获得控制量u(t),并由PLC 的DA模块输出到加热器的控制端子,从而完成对温控箱内温度的恒值控制。

式中kp为比例参数,ki为积分参数,kd为微分参数。
(3)接插件性能评价系统工作原理。从插拔力测试、接触电阻测量和显微表面形貌观测三方面对接插件的性能可靠性进行评价。首先,接插件在经历n 次插拔实验后,其插拔力降低到一定数值;其次,将接插件公端插针和母端插座取出,进行接触电阻测量;然后,通过电子显微镜对接插件表面磨损情况进行观测;最后,通过综合三方面的数据,给出接插件的性能可靠性评价结果。
2.2 实验系统的具体性能指标
本文设计的实验系统主要性能指标如下:
(1)电气接插件插拔力:0~50 N。
(2)环境温度:0~70 ℃。
(3)接触电阻测量精度:0.1 mΩ。
(4)插针表面形貌放大倍数:1 000 倍。
(5)同步带直线滑台行程:0~300 mm。
(6)同步带直线滑台速度:0~100 mm/s。
3 接插件插拔驱动机构设计
接插件插拔驱动机构是本实验系统的核心部件,是在普通同步带滑台的基础上,附加伺服电动机构成。接插件插拔驱动机构如图3 所示,主要是由接插件微动机构、接插件运动机构和伺服驱动机构组成。接插件母端、安装座、拉压传感器和垫块组成接插件固定机构。这种固定机构的设计有效地保证了公端与母端在插拔过程中位置的可靠性。接插件公端、导轨、滑块和安装座组成接插件运动机构。这种导轨滑块机构的设计有效地保证了公端和母端在插拔过程中的位置重复性。伺服电机、同步带滑台和拨叉构成伺服驱动机构。公端由伺服驱动机构通过拨叉拨动运动座,从而实现公端的正反方向驱动,完成接插件的插拔运动。如图3 所示,拨叉安装在同步带滑台上,接插件公端安装在运动座上,接插件母端安装在微动座上,运动座和微动座分别通过滑块安装在导轨上。各元件的相关参数见表1。这样,伺服电机可以通过同步带滑台实现驱动接插件公端和接插件母端的平稳插拔运动。

图3 接插件插拔驱动机构原理图
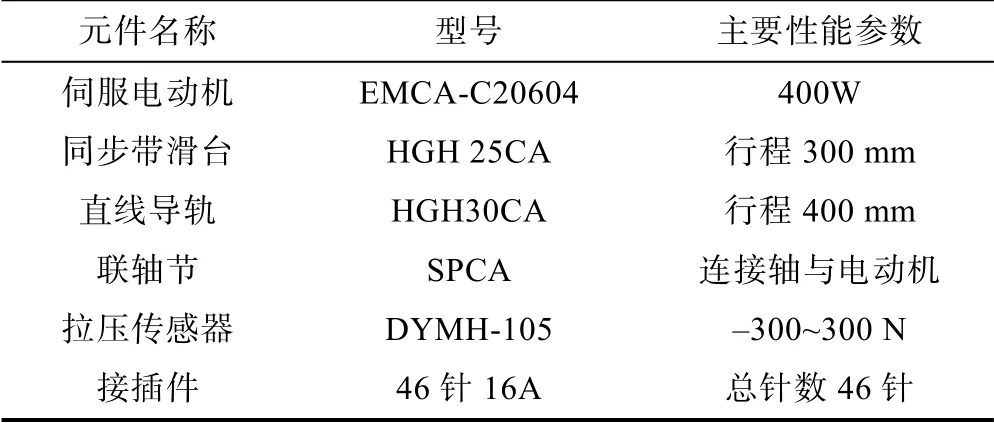
表1 元器件参数
4 实验系统电气控制设计
4.1 电气系统设计
4.1.1 PLC 控制系统设计
根据实验系统的加速测试需求,设计了如图4 所示的PLC 控制系统。该系统主要是由触摸屏(HMI)、PLC、AD 扩展模块、DA 扩展模块、伺服驱动器、伺服电动机、拉压传感器和温度控制器组成。其中,HMI通过RS485 通信电缆与CPU 进行通信,完成实验参数(运动速度、实验次数、运动位移)的设定;PLC通过与伺服驱动器的通信,实现对伺服电动机的控制;PLC 通过AD 扩展模块实现对接插件插拔力(拉压传感器)和温控箱温度(热电偶)的实时采集;PLC 通过DA 扩展模块实现对加热器的输出功率控制。
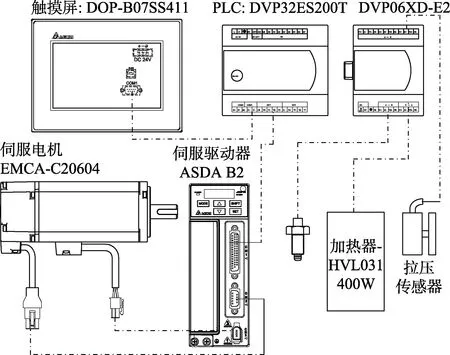
图4 PLC 控制系统
PLC 控制系统的硬件配置及相关具体参数如表2所示。

表2 PLC 控制系统硬件配置
4.1.2 伺服电机的驱动和控制回路设计
具体伺服电动机的驱动和控制回路设计如图5 所示,主要由强电和弱电回路组成。强电回路经由空气开关QF1 接入伺服驱动器R、S 端子,然后伺服驱动器输出U、V、W 端子连接伺服电动机三相绕组,为伺服电动机提供强电流驱动。弱电回路主要由控制供电回路、编码器回路和控制信号回路组成。伺服驱动器控制回路由空气开关QF2 连接伺服驱动器L1C和L2C端子实现;编码器回路由伺服驱动器CN2 接口与伺服电机的编码器连接而成;伺服驱动器控制回路由CN1 接口与PLC 的高速输出口Y0—Y2 连接而成,主要完成电机方向Y0、控制脉冲Y1 和使能信号Y2 的传输。
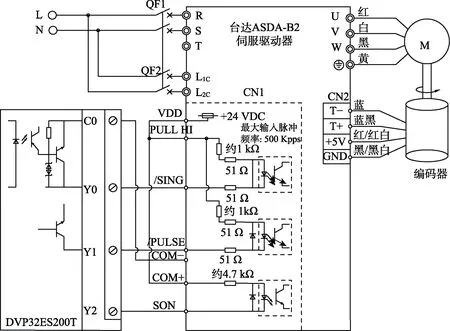
图5 伺服电动机的驱动与控制回路原理图
4.1.3 模拟信号的采样与控制回路设计
根据实验系统的设计要求,设计了如图6 所示的模拟信号采样与控制电路。模拟信号输入采用屏蔽双绞线实现传感器与PLC 中AD 扩展模块通道的连接,双绞线的屏蔽层与AD 扩展模块的相应通道接地端(FE)连接。
4.2 PLC 控制软件设计
基于台达WPLSoft 编程软件,根据实验系统的工作原理,接插件加速测试系统自动控制流程图见图7。该控制软件主要由点动控制模块、分段控制模块、自动控制模块和参数设置模块组成。
(1)点动控制模块是实验系统的最底层模块,提供了点对点控制信号有效性的监测功能,主要用于该系统每个执行元件的调试和故障处理。
(2)分段控制模块是实验系统中每个工作循环的自动运行模块,是自动控制模块的基础和子模块,提供了每个插拔动作循环有效性的监视和控制功能,主要用于单个插拔工作循环的调试与故障处理。
(3)自动控制模块是系统的关键模块,是所有实验工作循环的自动运行模块。它提供了环境温度和插拔驱动的自动控制功能,插拔力自动检测和判断功能,插拔次数、插拔力、温度记录和显示等功能,以及性能评价和状态报警功能。
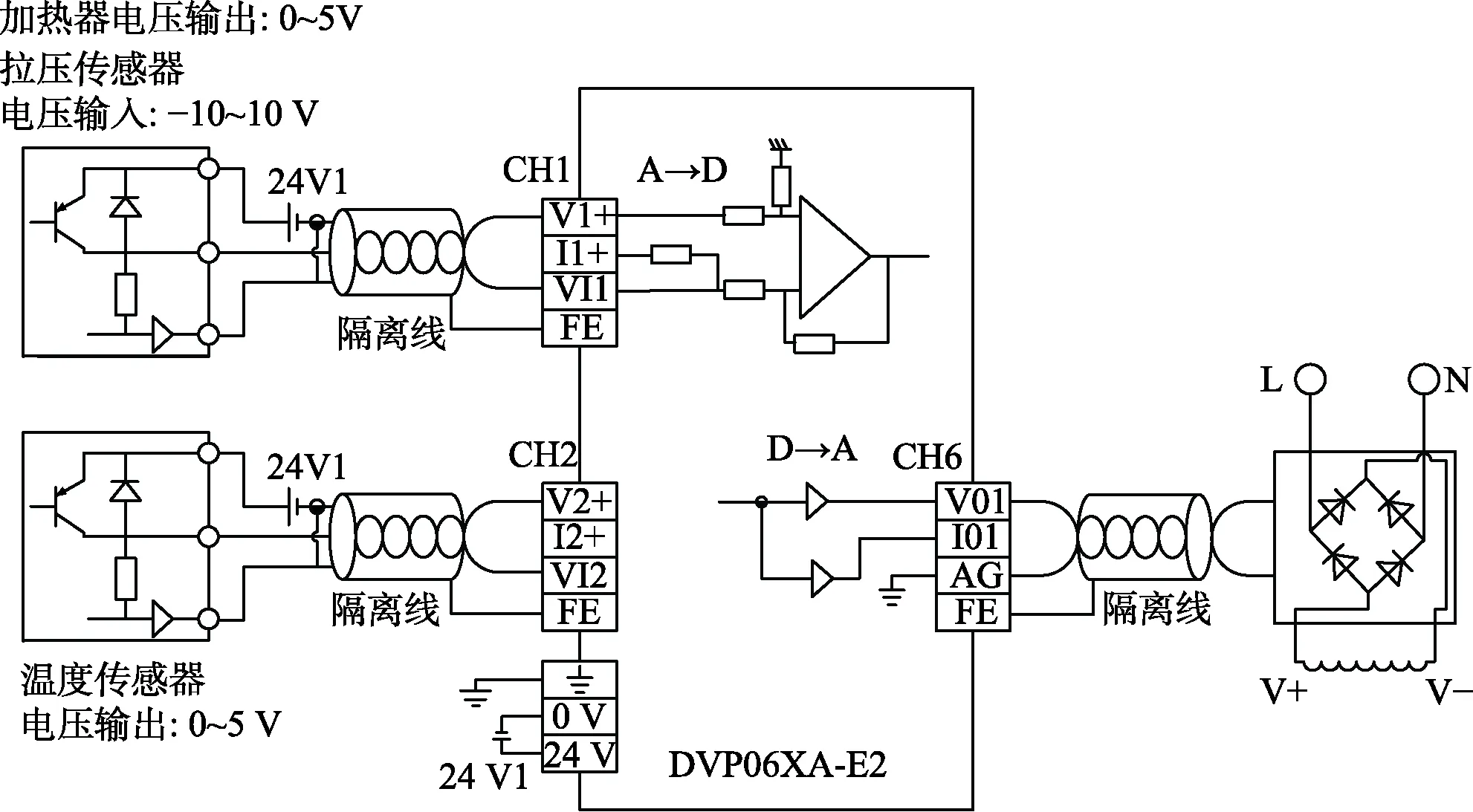
图6 实验系统模拟信号采样与控制原理电路

图7 系统自动控制流程图
4.3 触摸屏监控软件设计
利用台达触摸屏DOPSoft 2.00.07 编程软件平台,根据PLC 控制软件的设计思路,设计了相应的监控HMI软件界面。该触摸屏软件设计的功能主要有点动控制界面、分段测试界面、自动控制界面和参数设置界面。
(1)点动控制界面主要用于进行接插件插拔测试过程中的单个动作测试、数据显示和状态监控。
(2)分段测试界面主要用于接插件插拔测试过程中的单次插拔动作测试、数据显示和状态监控。
(3)自动控制界面主要用于系统自动运行过程中的数据显示和状态监控,图8 是接插件自动插拔测试时的系统监控界面。
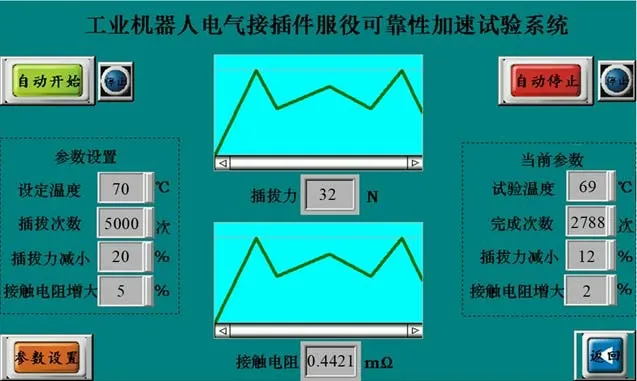
图8 实验系统自动控制监控界面
(4)参数设置界面主要用于设定点动、分段和自动控制测试界面中环境温度、插拔速度、位移和次数等具体运行参数。
5 实验设计
本实验系统实物图见图9,本实验系统占地面积仅有0.26 m2,结构紧凑,功能较多,可进行多项实验。

图9 实验系统实物图
(1)机电伺服传动控制实验。本实验属于基础型实验,通过对伺服电机点动和精密驱动的控制,认识基础电气控制元气件例如开关电源、电磁继电器、空气开关,了解伺服驱动器工作原理。应用机电传动技术知识绘制伺服电机控制回路图,让学生走进工程实际应用,以提高学生实际动手能力。
(2)恒值PID 温度控制实验。本实验属于进阶型实验,通过向学生讲解PID 控制算法,让学生自行编写PID 温度控制程序,并对温控箱进行控温实验。这可以让学生更深一层次地理解PID 控制中的比例、积分和微分参数,明确控制间隔、峰值、超调量和调整时间等性能指标的含义,从而提高学生学习经典控制理论的兴趣。
(3)插拔力(拉压传感器)观测实验。本实验属于高阶型实验,通过对接插件在不断插拔过程中的插拔力观测,让学生探索接插件的表面摩擦磨损与插拔力演化的相关联系,鼓励他们自行探究插拔力演化的原因,从而培养学生的自我分析问题能力。
(4)四点法接触电阻测量实验。本实验属于高阶型实验,将恒流源提供的电流通过两个探针接触接插件,用电压表测试两个测试点之间的电压,所测得的电压电流之比即为接触电阻。该实验可以让学生了解接插件接触电阻、测量误差、测量方法和测量不确定性的含义,以及接触电阻的演化特性和影响因素,从而培养学生的科学实验精神。
(5)接插件表面形貌观测实验。本实验属于高阶型实验,通过电子显微镜对磨损后插针表面进行观测,对比并测量不同插拔次数后插针表面磨损情况,用以解释接触电阻的变化趋势,从而培养学生自我分析和解决问题的能力。
6 结语
本文所设计的工业机器人电气接插件服役可靠性加速实验系统具有以下的特色和创新之处:
(1)该实验系统融合了恒值温度PID 控制技术、电伺服驱动技术、PLC 控制技术、插拔力检测技术和机电传动控制技术,能够完成经典机电伺服传动控制、插拔力传感和温度PID 控制等基础性教学实验;
(2)该实验系统集成服役可靠性加速实验理论,插拔力观测对比技术、表面形貌显微观测技术和接触电阻检测技术于一体,能够完成电气接插件在不同环境温度和插拔速度等参数倍增工况下服役可靠性加速测试实验,具有较好的教学实验设备先进性;
(3)该实验系统还可以根据插拔力、接触电阻和插针表面摩擦磨损形貌的演化观测,开展接插件服役可靠性的数据分析和讨论,能有效满足大学生进阶型和高阶型培养所需的实验设备要求,具有较高的实验和研究应用价值。
猜你喜欢
电脑爱好者(2020年6期)2020-05-26 09:27:33
机械制造(2020年1期)2020-02-22 14:16:47
上海质量(2019年8期)2019-11-16 08:47:46
制造技术与机床(2017年3期)2017-06-23 08:11:35
电子制作(2017年2期)2017-05-17 03:55:06
光学精密工程(2016年5期)2016-11-07 09:06:04
电子元件与材料(2016年10期)2016-10-24 01:28:21
电测与仪表(2015年6期)2015-04-09 12:01:18
上海电机学院学报(2015年3期)2015-02-28 14:29:52
风能(2015年9期)2015-02-27 10:15:24
